(54) РУЧНОЙ ПРИВОД ТОРМОЗА
| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный прибор а.п.четверткова | 1974 |
|
SU662378A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
| Механизм управления стояночнымТОРМОзОМ | 1979 |
|
SU839788A1 |
| Привод стояночного тормоза | 1990 |
|
SU1722915A2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Устройство для управления частотой вращения коленчатого вала двигателя внутреннего сгорания | 1986 |
|
SU1325176A1 |
Изобретение относится к механизмам торможения транспортных средств, в частности к управлению их исполнительными механизмами.
Наиболее близким к предлагаемому по технической сущности является ручной привод тормоза, содержащий корпус с зубчатым сектором и поворотным валом, связанным с рычагом и исполнительным механизмом, при этом рычаг оборудован рукояткой, закрепленной на оси подпружиненной защелкой, и тягой управления 1.
Недостаток указанного привода заключается в неудобстве управления им при ограниченном рабочем пространстве.,
Цель изобретения - повыщение удобства управления приводом.
Указанная цель достигается тем, что рукоятка и рычаг соединены шарнирно посредством оси подпружиненной защелки, причем на рычаге и подпружиненной защелке выполнены выступы, расположенные с равным угловым щагом относительно оси защелки, а рукоятка снабжена толкателем и подпружиненным пальцем, кинематически связанными с тягой управления и установленными с возможностью взаимодействия соответственно с выступами на подпружиненной защелке и рычаге.
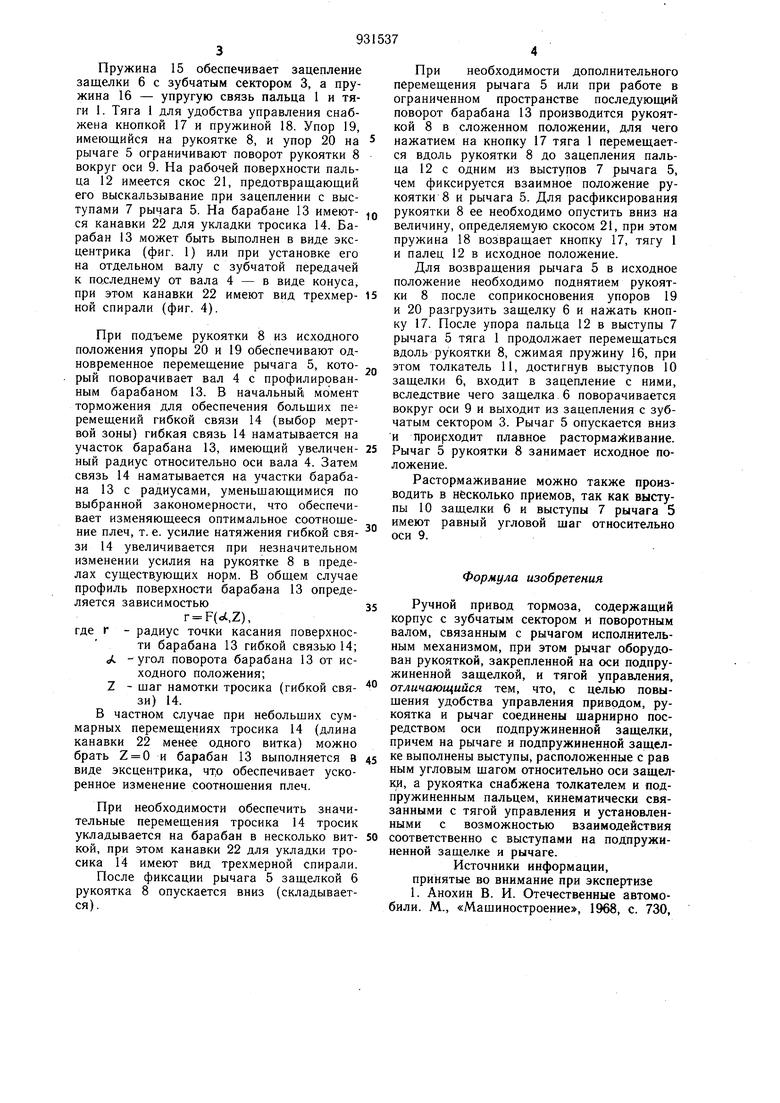
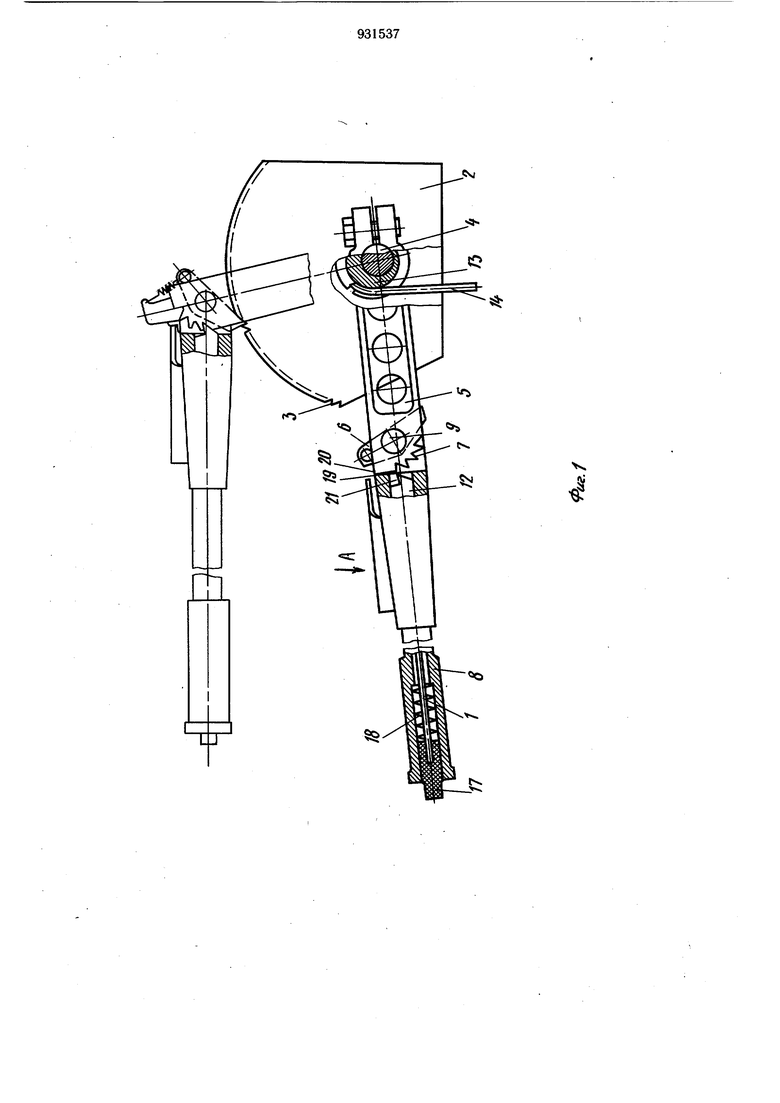
На фиг. 1 изображен вид ручного привода тормоза в исходном и тонкими линиями в промежуточном (при сложенной рукоятке) положениях; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 2 (показаны выступы на собачке); на фиг. 4 - вариант исполне10 ния барабана.
Привод тормоза состоит из тяги 1 управления и корпуса 2 с зубчатым сектором 3. В корпусе 2 установлен вал 4, на наружном конце которого жестко закреплен рычаг 5. 15 Верхний конец этого рычага снабжен защелкой 6, выступами 7 и рукояткой 8, причем защелка 6 и рукоятка 8 установлены на общей оси 9. Защелка 6 имеет дополнительные выступы 10. Тяга I связана с толкателем 11 и подпружиненным пальцем 2. На валу 4 внутри корпуса 2 установлен профилированный барабан 13, к которому крепится гибкая связь (тросик Боудена) 14, передающая- усилие на исполнительный механизм (не показан). Пружина 15 обеспечивает зацепление защелки 6 с зубчатым сектором 3, а пружина 16 - упругую связь пальца 1 и тяги 1. Тяга 1 для удобства управления снабжена кнопкой 17 и пружиной 18. Упор 19, имеющийся на рукоятке 8, и упор 20 на рычаге 5 ограничивают поворот рукоятки 8 вокруг оси 9. На рабочей поверхности пальца 12 имеется скос 21, предотвращающий его выскальзывание при зацеплении с выступами 7 рычага 5. На барабане 13 имеются канавки 22 для укладки тросика 14. Барабан 13 может быть выполнен в виде эксцентрика (фиг. 1) или при установке его на отдельном валу с зубчатой передачей к последнему от вала 4 - в виде конуса, при этом канавки 22 имеют вид трехмерной спирали (фиг. 4). При подъеме рукоятки 8 из исходного положения упоры 20 и 19 обеспечивают одновременное перемещение рычага 5, который поворачивает вал 4 с профилированным барабаном 13. В начальный) момент торможения для обеспечения больших перемещений гибкой связи 14 (выбор мертвой зоны) гибкая связь 14 наматывается на участок барабана 13, имеющий увеличенный радиус относительно оси вала 4. Затем связь 14 наматывается на участки барабана 13 с радиусами, уменьшающимися по выбранной закономерности, что обеспечивает изменяющееся оптимальное соотношение плеч, т. е. усилие натяжения гибкой связи 14 увеличивается при незначительном изменении усилия на рукоятке 8 в пределах существующих норм. В общем случае профиль поверхности барабана 13 определяется зависимостью r F(ct,Z), где г - радиус точки касания поверхности барабана 13 гибкой связью 14; ,А -угол поворота барабана 13 от исходного положения; Z - щаг намотки тросика (гибкой связи) 14. В частном случае при небольших суммарных перемещениях тросика 14 (длина канавки 22 менее одного витка) можно брать 2 0 и барабан 13 выполняется в виде эксцентрика, чт,о обеспечивает ускоренное изменение соотношения плеч. При необходимости обеспечить значительные перемещения тросика 14 тросик укладывается на барабан в несколько виткой, при этом канавки 22 для укладки тросика 14 имеют вид трехмерной спирали. После фиксации рычага 5 защелкой 6 рукоятка 8 опускается вниз (складывается). При необходимости дополнительного перемещения рычага 5 или при работе в ограниченном пространстве последующий поворот барабана 13 производится рукояткой 8 в сложенном положении, для чего нажатием на кнопку 17 тяга 1 перемещается вдоль рукоятки 8 до зацепления пальца 12 с одним из выступов 7 рычага 5, чем фиксируется взаимное положение рукоятки 8 и рычага 5. Для расфиксирования рукоятки 8 ее необходимо опустить вниз на величину, определяемую скосом 21, при этом пружина 18 возвращает кнопку 17, тягу 1 и палец 12 в исходное положение. Для возвращения рычага 5 в исходное положение необходимо поднятием рукоятки 8 после соприкосновения упоров 19 и 20 разгрузить защелку 6 и нажать кнопку 17. После упора пальца 12 в выступы 7 рычага 5 тяга 1 продолжает перемещаться вдоль рукоятки 8, сжимая пружину 16, при этом толкатель 11, достигнув выступов 10 защелки 6, входит в зацепление с ними, вследствие чего защелка 6 поворачивается вокруг оси 9 и выходит из зацепления с зубчатым сектором 3. Рычаг 5 опускается вниз и проирходит плавное растормаживание. Рычаг 5 рукоятки 8 занимает исходное положение. Растормаживание можно также производить в несколько приемов, так как выступы 10 защелки 6 и выступы 7 рычага 5 имеют равный угловой шаг относительно оси 9. Формула изобретения Ручной привод тормоза, содержащий корпус с зубчатым сектором и поворотным валом, связанным с рычагом исполнительным механизмом, при этом рычаг оборудован рукояткой, закрепленной на оси подпружиненной защелкой, и тягой управления, отличающийся тем, что, с целью повыщения удобства управления приводом, рукоятка и рычаг соединены шарнирно посредством оси подпружиненной защелки, причем на рычаге и подпружиненной защелке выполнены выступы, расположенные с рав ным угловым шагом относительно оси защелки, а рукоятка снабжена толкателем и подпружиненным пальцем, кннематически связанными с тягой управления и установленными с возможностью взаимодействия соответственно с выступами на подпружиненной защелке и рычаге. Источники информации, принятые во внимание при экспертизе 1. Анохин В. И. Отечественные автомобили. М., «Мащиностроение, 1968, с. 730,
fM
ВиЗА
Фиг. 2
Фиг. 3
