I
Изобретение относится к пневматическим и гидравлическим исполнительным механизмам и предназначено для использования в системах автома тизации.
Известен шаговый пневмо(гидро)привод, содержащий цилиндр с установленным в нем поршнем и выполненными окнами, связанными с атмосферой через клапаны с управляющим входом 1,
Недостатком известного привода является то, что для обеспечения позиционирования объекта по заданной программе в ряде случаев требуется введение в систему управления позиционной обратной связи.
Цель изобретения - упрощение конструкции привода.
Поставленная цель достигается тем, что привод снабжен регулируемыми дросселями и эжекторами, каждый из которых расположен между одним из окон цилиндра и клапаном, причем выход эжектора через регулируемыи дроссель связан с управляющим входом клапана, а межсопловая камера каждого эжектора - с клапаном.
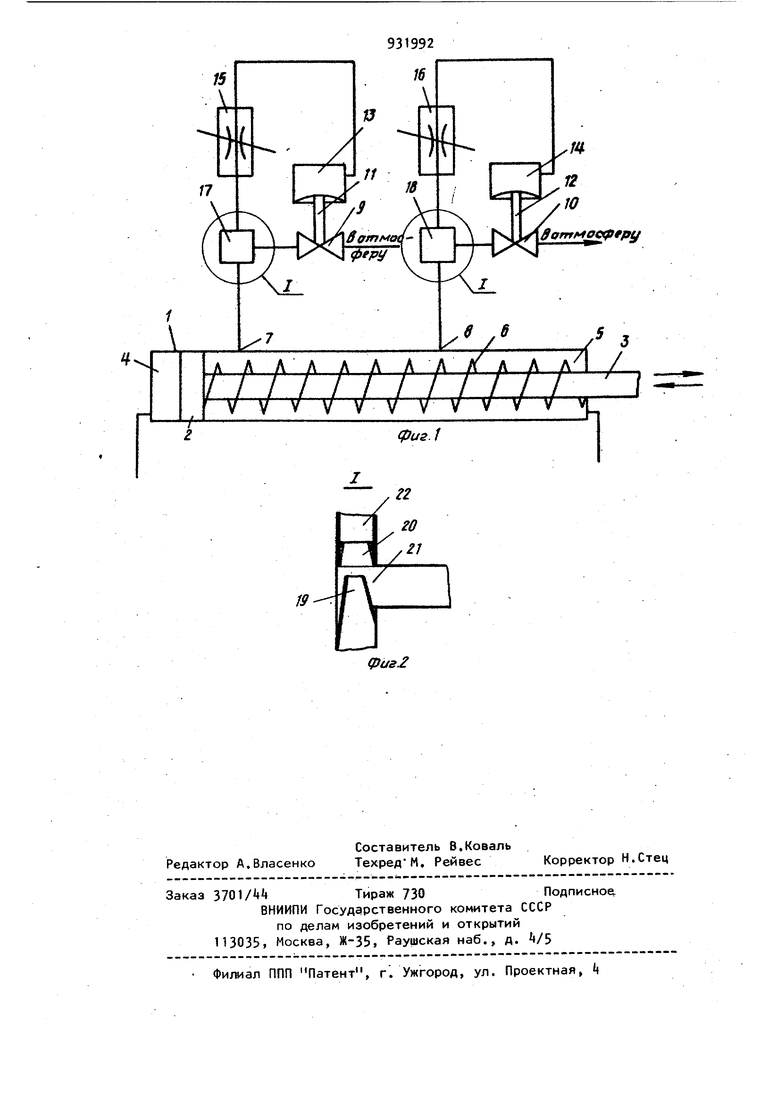
На фиг. 1 представлен привод на фиг. 2 - эжектор.
Шаговый пневмо(гидро)привод еодер жит цилиндр 1 с установленным в нем поршнем 2 со штоком 3 с образованием рабочих полостей Ц и S- В nongCTM 5 расположена пружина 6, взаимодействующая с поршнем 2. На цилиндре 1. выполнены окна 7 и 8, связанные с атмосферой (сливом) через клапаны 9 и 10, с управляющими входами, включающими мембранный механизм 11 и 12, управляющую полость 13 и }Ц. Кроме того, привод содержит регулируемые дроссели 15 и 16 и эжектары 17 и 18, каждый из которых вкдючает два сопла 19 и 20 (фиг.2), межсопловую камеру 21 и выход 22, а выходы 22 эжекторов 17 и 18 подключены чег рез соответствующие регулируемые дроссели 15 и 16 к управляющим полостям 13 и k, межсопловая камера 21 - к клапанам 9 и 10, а сопло 19 связано с окнами 7 и 8 цилиндра 1, Привод работает следующим образом Рабочая среда мерез управляющее устройство (не показано) подается в рабочую полость k, при этом рабочая полость 5 связана с атмосферой. Под действием перепада давления в полостях Д и 5 поршень 2 со штоком 3 перемещается, сжимая пружину 6. Поршень 2, пройдя окно 7 цилиндра 1, остановится, так как наступит равновесие между усилием пружины 6, полезной нагрузкой и усилием, развиваемым Т|Оршнем 2, поскольку рабоМая полость k сообщится с атмосферой через эжектор 17 и нормально otKpwтый клапан 9. Время задержки поршня 2 относительно окна 7 зависит от времени срабатывания клапана 9 управляющая полость 13 которого наполняется рабочей средой через регулируемый дроссель 15 и эжектор 17, расположенный между окном 7 и клапаном 9. При этом кинетическая энергия рабочей среды, поступающей из полости k через окно 7, за счет динамического напора через сопло 19 преобразуется в давление раЬочёй среды в управляющей полости 13 и мембранный ,механизм 11 закрывает клапан 9. Koi- да клапан 9 закроется, давление в рабочей полости k возрастает и поршень 2 перемещается до окна 8, и Циклвновь повторяется, при этом следует учесть, что клапаны 9 и 10 не откроются, поскольку их управляющие входы находятся под давлением рабочей среды, поступающей из полости Ц, После достижения крайнего положения поршня 2 управляющее устройство сообщает полость с атмосферой а полость 5 с источником питания (не показан). Поршень 2 занимает исходное положение, а клапаны 9 и 10 откроются, поскольку давление рабочей среды управляющих полостей 13 и И падает.
Время выдержки между шагами может регулироваться сопротивлением дросселей 15 и 16, а также выбором объема управляющих полостей 13 и 14 соответствующих мембранных механизмов 11 и 12 без дополнительного применения позиционной обратной связи по положению штока 3.
Применение предлагаемого привода в устройствах контрюля, например, уровней и температур в закрытых электролизерах позволит экономить дорогостоящие тугоплавкие материалы, повысить качество получаемого продукта, сократить затраты на изготовление, обслуживание и ремонт устройств.
Формула изобретения
Шаговый пневмо(гидро)привод, содержащий цилиндр с установленным в нем поршнем и выполненными окнами связанными с атмосферой через клапаны с управляющим входом, отличающийся тем, что, с целью упрощения конструкции, привод снабжен регулируемыми дросселями и эжекторами, каждый из которых расположен между одним из окон цилиндра и клапаном, причем выход эжектора через регулируемый дроссель связан с управляющим входом клапана, а межсопловая камера кащого эжектора с клапаном.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР ff383905. кл. F 15 В 11/12, 1971.
SorrrMOaf fpt/
дзиг2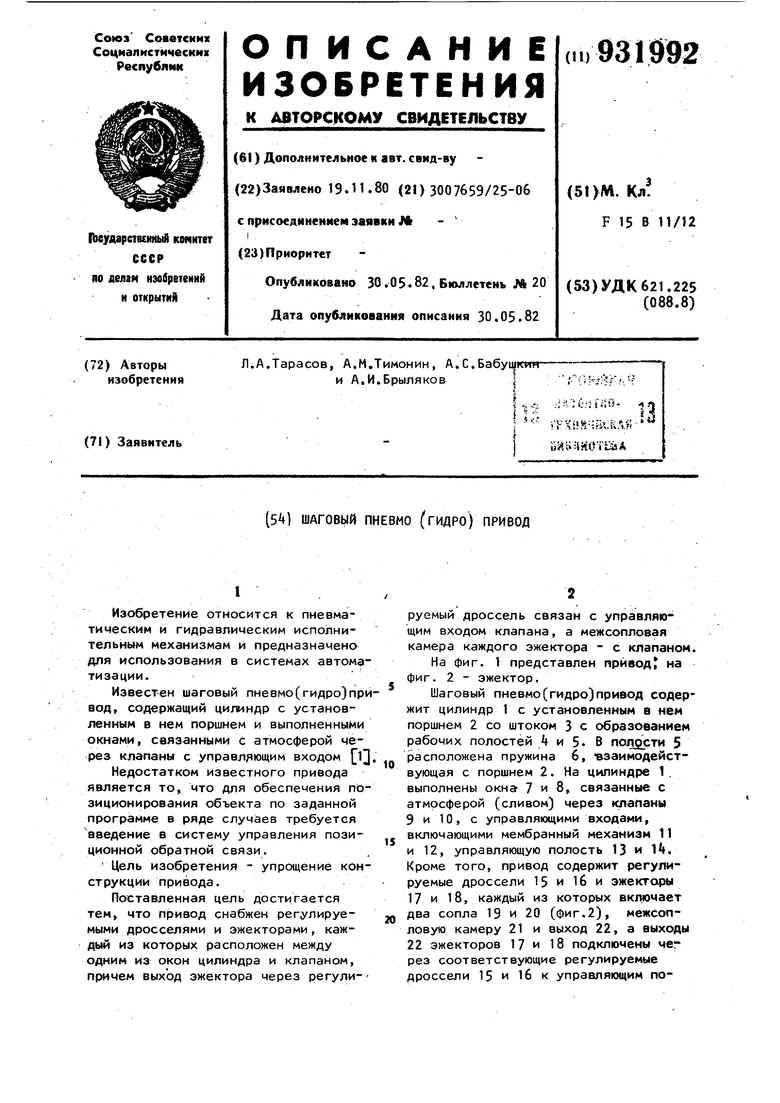
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный привод | 1983 |
|
SU1160135A1 |
| Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности | 1989 |
|
SU1782849A1 |
| Гидро(пневмо)привод | 1987 |
|
SU1650966A1 |
| Устройство управления гидрораспределителем шахтной крепи | 1974 |
|
SU627242A1 |
| Многоопорная дождевальная машина | 1982 |
|
SU1055431A1 |
| Вакуумное захватное устройство транспортного средства | 1989 |
|
SU1625812A1 |
| Самореверсирующийся гидро(пневмо)привод | 1988 |
|
SU1605044A1 |
| Пневмогидравлический привод | 1982 |
|
SU1035301A1 |
| РАСПРЕДЕЛИТЕЛЬНОЕ КЛАПАННОЕ УСТРОЙСТВО | 1989 |
|
RU2074990C1 |
| Поршневой гидро(пневмо)привод двойного действия | 1979 |
|
SU985467A1 |