v п „ ;г J
22 a
Јиг
Изобретение относится к транспортному машиностроению и может быть использовано при автоматизации технологических процессов с использованием транспортных манипуляторов.
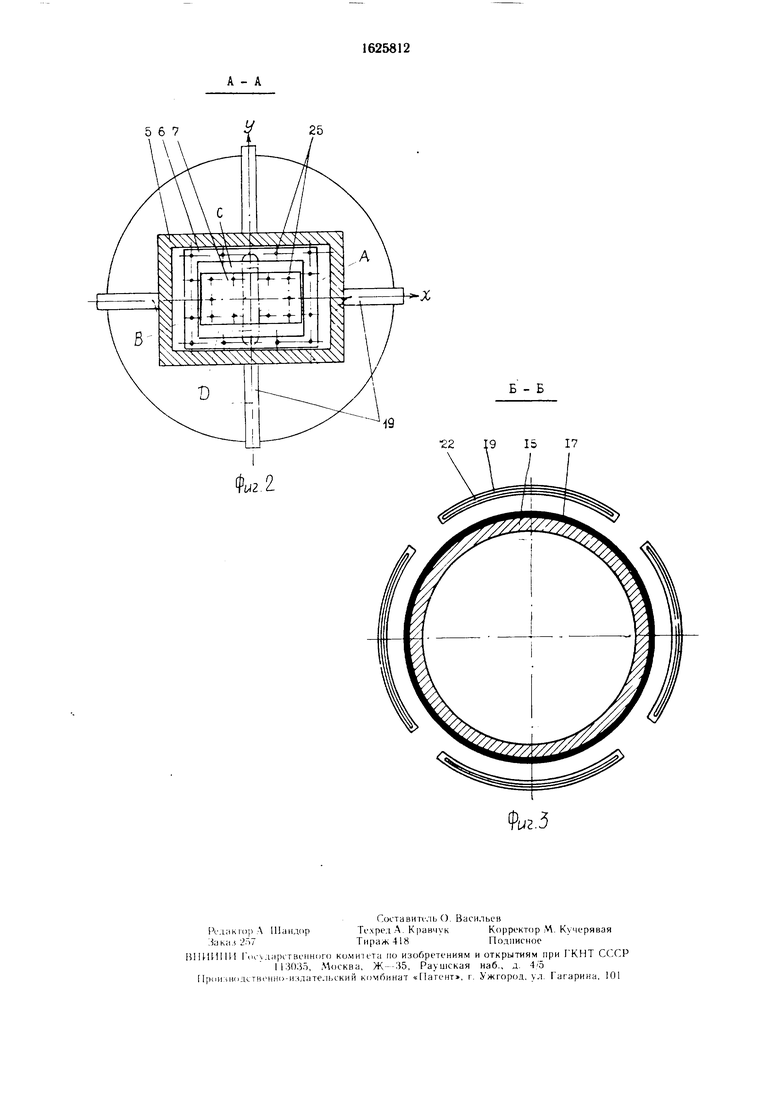
На фиг. 1 приведена конструкция предложенного устройства; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг 1.
Устройство содержит установленный на транспортном средстве пневмопривод 1 вертикального перемещения подъема-опускания, со штоком 2 которого связан фланец 3, на котором закреплен пневмопривод 4 прижима. С корпусом пневмопривода 4 приДавление от источника 24 сжатого газа подается в поршневую полость 36. При этом корпус 15 вакуумной присоски движется до упора в поверхность 12 фиксации. Зате
с включается электропневмоклапан 26, который подает давление в полость полого корпуса 5 через мембранные дроссели -25, тем самым образуя воздушную подушку между корпусом 5 и рамкой 6 и полым корпусом 5 и плоским поршнем 7, после чего
Ю сжатый газ выходит в атмосферу через сопла 22. Затем включается клапан 34, подающий сжатый газ к эжектору 32. При упоре в поверхность 12 фиксации корпуса 15 вакуумной присоски с эластичной
жима жестко связан полый корпус 5, в ко- манжетой 17 и торцовых поверхностей 21
тором расположена рамка 6 и плоский поршень 7 с возможностью их движения во взаимно перпендикулярных направляющих х и у Па штоке 8 пневмопривода 4 установлен прижимной фланец 9, расположенный со стороны торцовой поверхности 10 плоского поршня 7. На торцовой поверхности 1 плоского поршня 7, обращенной к поверхности 12 фиксации, установлена тяга 13, на которой с помощью шарнира 14 закреплен корпус 15 вакуумной присоски, оснащенный полостью 16. Корпус 15 вакуумной присоски снабжен эластичной манжетой 17. На корпусе 15 вакуумной присоски с помощью шарниров 18 закреплены крестообразно четыре рычага 19, подпружис соплами 22 при отсутствии дефектов на поверхности 12 фиксации полость 16 начинает вакуумироваться, тем самым надежно фиксируя на поверхности 12 корпус 15 вакуумной присоски. Кроме того, начинает
20 вакуумироваться и штоковая полость 27, при этом шток 8 с прижимным фланцем 9 двигаются до упора в торцовую поверхность 10, тем самым фиксируя от движения рамку 6 и плоский поршень 7.
2J- При попадании сопел 22 на дефекты или края поверхности 12 фиксации сопротивления истечению противолежащих сопел 22 разные, причем сопротивление истечению сопла 22, попавшего на дефект поверхности 12, меньше, чем у сопла 22, наненные в направлении поверхности 12 фик- 30 ходящегося на бездефектной части поверхсации с помощью пружин 20 растяжения. На торцовых поверхностях 21 рычагов 19 расположены сопла 22. связанные пневмо- линиями 23 с противоположно расположенными полостями А, В, С, D полого кор25 и электропневмоклапан 26. В штоковой полости 27 пневмопривода 4 установлена прчжина 2S сжатия При этом поршневая
ности 12 фиксации. Таким образом, расход через сопло 22. находящееся над дефектом, больше чем расход через другое сопло 22. Это, в свою очередь, приводит к тому, что в полости полого корпуса 5,
пуса 5, которые соединены с источником 24 35 связанной с соплом 22, находящимся над сжатого га ч море мембранные дроссели дефектом поверхности 12 фиксации, снижается давление, что приводит к смещению рамки 6 и плоского поршня 7 в сторону от дефекта. Это движение может
полость 29 соединена с атмосферой, а што- происходить в двух направлениях х и у, ковая полость 27 через дроссель 30 лини- причем движение в направлении х обеспечивается расположенной в этой плоскости парой сопел 22 и рамкой 6, а в направлении у - другой парой сопел 22 и плоским поршнем 7. В случае движения по
ей 31 - с источником вакуумирования, выполненным, например, в виде эжектора 32 Полость 16 соединена со штоковой полостью 27 Эжектор 32 связан линией 33
высокого давления с источником 24 ежа- 45 направлению у плоский поршень 7 сам перетого газа через пневмоклапан 34, На корпусе 15 вакуумной присоски закреплена тяга 35, которая зафиксирована в полом корпусе 5 и тем самым предотвращает от поворота коргпс 15 вакуумной присоски.
мещает корпус 15 вакуумной присоски, а при движении в направлении х рамка 6 перемещает в этом направлении плоский поршень 7 с установленным на ней корпусом 15 вакуумной присоски. В случае смещения
Поршневая 36 и шгоковая 37 полости пнев- 50 полости 16 с дефектной области поверхности 12 осуществляется вакуумирование полостей 16 и 27, что приводит к фиксации захватного устройства на поверхности.
мопривода I связаны с источником 24 сжатого га а через пневмоклапан 38.
Сопла 22 могут быть выполнены щелевыми dpur. 3). а в полости 29 можетОписанные поисковые движения облас- быть установлен конечный микровыключа-55 ти поверхности без дефектов носят на- тель 39, включенный в линию электроуп-правленный характер в двух взаимно пер- равления 40 клапана 26.пендикулярных направлениях, т. е. осущестУстройство работает следующим образом.вляютс я направленные поисковые движения
Давление от источника 24 сжатого газа подается в поршневую полость 36. При этом корпус 15 вакуумной присоски движется до упора в поверхность 12 фиксации. Зате
с включается электропневмоклапан 26, который подает давление в полость полого корпуса 5 через мембранные дроссели -25, тем самым образуя воздушную подушку между корпусом 5 и рамкой 6 и полым корпусом 5 и плоским поршнем 7, после чего
сжатый газ выходит в атмосферу через сопла 22. Затем включается клапан 34, подающий сжатый газ к эжектору 32. При упоре в поверхность 12 фиксации корпуса 15 вакуумной присоски с эластичной
манжетой 17 и торцовых поверхностей 21
манжетой 17 и торцовых поверхностей 21
с соплами 22 при отсутствии дефектов на поверхности 12 фиксации полость 16 начинает вакуумироваться, тем самым надежно фиксируя на поверхности 12 корпус 15 вакуумной присоски. Кроме того, начинает
вакуумироваться и штоковая полость 27, при этом шток 8 с прижимным фланцем 9 двигаются до упора в торцовую поверхность 10, тем самым фиксируя от движения рамку 6 и плоский поршень 7.
При попадании сопел 22 на дефекты или края поверхности 12 фиксации сопротивления истечению противолежащих сопел 22 разные, причем сопротивление истечению сопла 22, попавшего на дефект поверхности 12, меньше, чем у сопла 22, намещает корпус 15 вакуумной присоски, а при движении в направлении х рамка 6 перемещает в этом направлении плоский поршень 7 с установленным на ней корпусом 15 вакуумной присоски. В случае смещения
в плоскости до момента вакуумирования полости 16 или (в случае отсутствия зоны, где возможно вакуумирование) до отключения клапанов 34, 26, 38.
Возврат вакуумного захватного устройст- ва в исходное состояние г .уществляется следующим образом Сначала отключаются сигналы управления с клапанов 26 и 34, за счет чего полость 16 соединяется с ат- мосффой. После переключения клапана 38 осуществляется подъем устройства от поверхности фиксации.
В случае выполнения сопел 22 щелевыми (фиг. 3) расширяется диапазон очувствления захватного устройства, что увели- чньает его надежность работы за счет по- вышения вероятности направленного нахождения бездефектной области поверхности 12.
Установление в полости 29 концевого выключателя 39 (который может быть выполнен, например, электрическим при нали- чии у пневмоклапана 26 электроуправления) дает возможность автоматически отключить подачу сжатого воздуха в полости полого корпуса 5 при фиксации на поверхности 12. Это приводит к уменьшению расхода сжатого воздуха и к повышению надежности прижима фланцем 9 плоского поршня 7 и рамки 6 к полому корпусу 5.
Формула изобретения
1. Вакуумное захватное устройство транспортного средства, содержащее вакуумную присоску с приводом вертикального перемещения, корпус которой прикреплен к штоку этого привода и оснащен эластичной манжетой, а его полость связана с источ- никои вакуумнрования, а также источник сжатого воздуха, отличающееся тем, что, с
5
0 5
0
5
целью расширения функциональных визмож «остей, оно снабжено мембранными дрг-- (Селями, электропневмоклапаном, лтсселем, Пневмоприводом прижима, корпус которого закреплен на штоке привода в.. ртика.н.ного перемещения, и полым корпусом со смонтированными в нем с чозможнг . тью nppt-- мещения во взаимно перпендикулярны направлениях рамкой и расположенным внутри нее плоским поршнем с образованием полостей между стенками этого корпуса и рамкой, а также между этой рамкой и плоским поршнем, который шарнирно соединен с корпусом вакуумной присоски и расположен с возможностью взаимодействия со штоком пневмопривода прижима, выполненном подпружиненным, при эгом вакуумная присоска снабжена по меньшей мере четырьмя рычагами с соплами на их концах, которые попарно сообщены с соответствующими полостями рамкой и полым корпусом и рамкой и плоским поршнем, а эти полости через мембранные дроссели, размещенные на торцах рамки и плоского поршня, и электропневмокла- пан сообщены с источником сжатого воздуха, причем штоковая и поршневая полости пневмопривода прижима сообщены соответственно с полостью корпуса присоски и атмомферой, дроссель установлен в линии, в которой полость корпуса присоски сообщена с источником вйкуумирования, j рычаги шарнирно закреплены на корпусе присоски, подпружинены относительно него и расположены крестообразно
2.Устройство по п. 1, отличающееся тем, что пневмопривод прижима снабжен конечным выключателем, установленным в цепи управления электрочневмоклапаном
3.Устройство по п. 1, отличающееся тем, ч го сопла выполнены щелевыми
567
Б - Б
15
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1701517A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
Изобретение относится к транспортно му машиностроению, в частности к вакуумным захватам для фиксации транспортных средств Цель изобретения - расширение функциональных возможностей за счет адаптации захватного устройства к неровностям поверхности Захватное устройство содержит привод 1 вертикального пере2 мещения, на штоке 2 которого смонтирован пневмопривод 4 прижима К последнему жестко прикреплен полый корпус 5, в котором с возможностью взаимно перпендикулярного перемещения размещены рамка 6 и плоский поршень 7, взаимодействующий с прижимным фланцем 9 штока 8 Корпус 15 вакуумной присоски смонтирован с помощью шарнирной тяги 13 на плоском поршне 7 и на нем шарнирно установлены крестообразно расположенные четыре рычага 19 с соплами 22 на их кон цах Эти сопла сообщены через противоположные полости, образованные между рамкой 6 и поршнем 7, а также между рамкой 6 и корпусом 5, и электропнев- моклапан 26 с источником сжатого воздуха Полость 16 присоски и штоковая полость пневмопривода сообщены с источником вакуума - эжектором 32 чере дроссель 30, а поршневая полость пневмопривода сообщена с атмосферой 2 з п ф-лы, 3 ил 36 § (Л о ГчЭ сд 00 ьо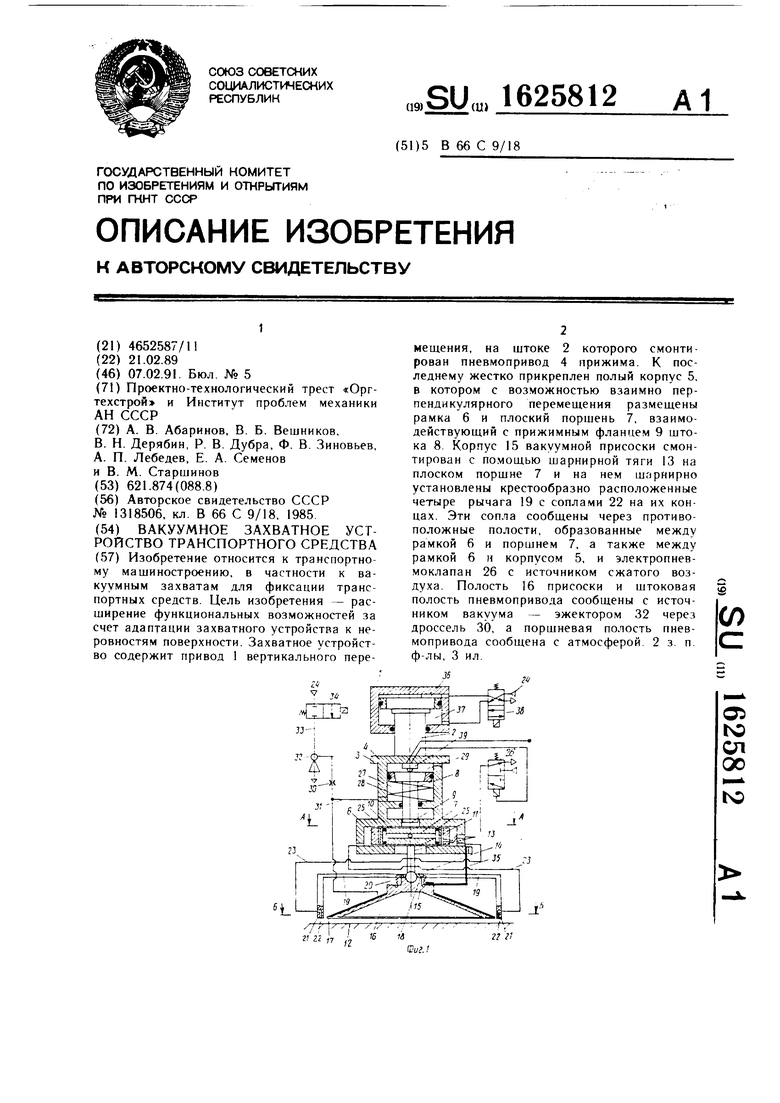
| Захватное устройство для фиксации положения транспортного средства | 1985 |
|
SU1318506A1 |
