(54) ВЕСЫ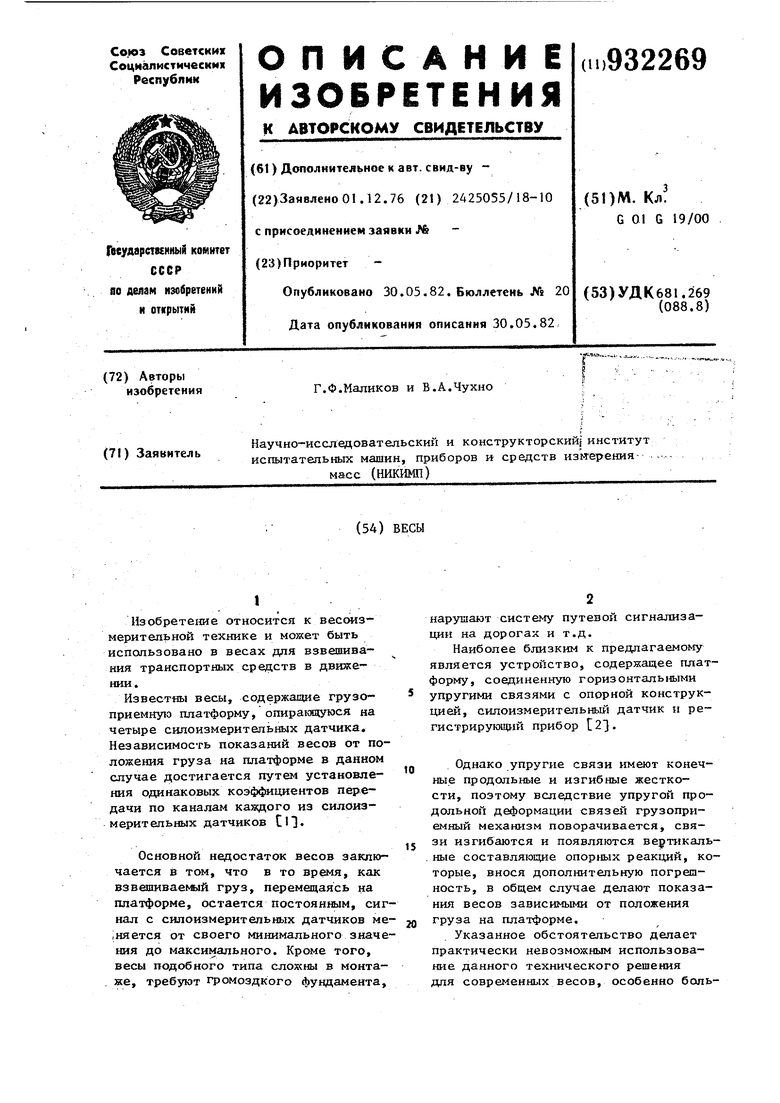
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЕ АВТОМОБИЛЬНЫЕ ВЕСЫ | 1992 |
|
RU2066851C1 |
| Весы для взвешивания транспортных средств в движении | 1978 |
|
SU932270A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА В ТРАНСПОРТНОМ СРЕДСТВЕ | 1995 |
|
RU2110047C1 |
| Устройство для взвешивания | 1989 |
|
SU1732174A1 |
| Бесфундаментные переносные весы | 1989 |
|
SU1719918A1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| СПОСОБ СОЗДАНИЯ КОНТРОЛИРУЕМОЙ СИЛЫ ПРИ ПРОВЕРКЕ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530786C1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
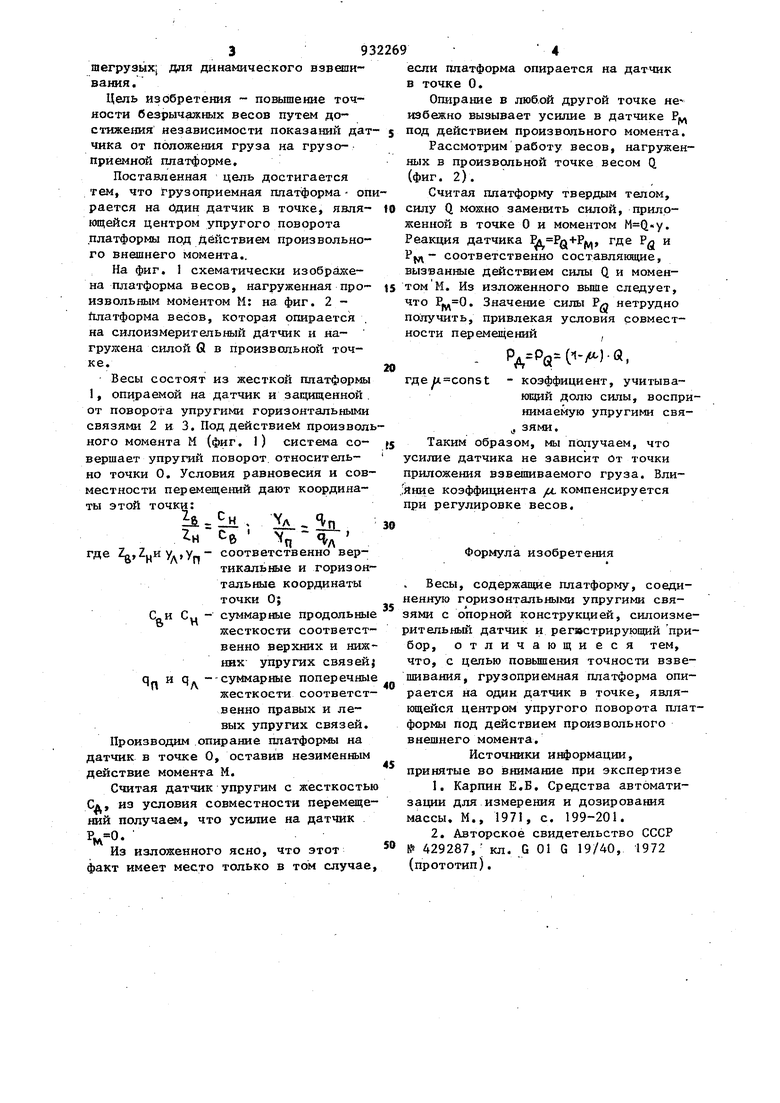
Изобретение относится к весоизмерительной технике и может быть использовано в весах для взвешивания транспортных средств в движении. HsBecTiffii весы, содержащие грузоприемную платформу, опираюс уюся на четыре силоизмерительных датчика. Независимость показаний весов от по ложения груза на платформе в данном случае достигается путем установления одинаковых коэффициентов передачи по каналам каждого из силоиз- мерительных датчиков СП Основной недостаток весов заклю чается в том, что в то время, как взвeшивae fi Iй груз, перемещаясь на платформе, остается постоянным, сиг нал с силоизмерительных датчиков ме |Няется от своего минимального значе ния до максимального. Кроме того, весы подобного типа сложены в монтаже, требуют громоздкого фундамента. нарушают систему путевой сигнализации на дорогах и т.д. Наиболее близким к предлагаемому является устройство, содержащее платформу, соединенную горизонтальными упругими связями с опорной конструкцией, силоизмерительный датчик и регистрирующий прибор 2. Однако упругие связи имеют конечные продольные и изгибные жесткости, поэтому вследствие упругой продольной деформации связей грузоприемный механизм поворачивается, связи изгибаются и появляются ве тикальные составляющие опорных реакций, которые, внося дополнительную погрешность, в общем случае делают показания весов зависимыми от положения груза на платформе. Указанное обстоятельство делает практически невозможным использование данного технического решения для современных весов, особенно большегрузых для динa шчecкoгo взваливания. Цель изобретения повьшение точности безрычажных весов путем достижения независимости показаний дат чика от положения груза на грузоприемной платформе. Поставленная цель достигается тем, что грузоприемная платформа - оп рается на Один датчик в точке, являющейся центром упругого поворота платформы под действием произвольного внешнего момента.. На фиг. 1 схематически изобралсена платформа весов, нагруженная произвольным моментом М: на. фиг. 2 йлатформа весов, которая опирается на силоизмерительный датчик и нагружена силой Q в произвольной точке. Весы состоят из жесткой платформы 1, опираемой на датчик и защищенной . от поворота упругими горизонтальными связями 2 и 3. Под действием произвол ного момента М (фиг. 1 ) система совершает упругий поворот, относитепь- но точки О. Условия равновесия и совместности перемещений дают координаты этой 1 г ±i- ЕН г .. -ч/ „ Г :5щ., й ъ п % где 2,г„иуд, соответственно вертикальные и горизон тальные координаты точки О; суммарные продольны жесткости соответст венно верхних и ниж них упругих связей q и q. --суммарные поперечны жесткости соответст венно правых и левых упругих связей. Производим опирание платформы на датчик в точке О, оставив незименным действие момента М. Считая датчик упругим с жесткость Сд, из условия совместности перемеще ний получаем, что усилие на датчик VOИз изложенного ясно, что этот факт имеет место только в том случае если платформа опирается на датчик в точке 0. Опирание в любой другой точке не избежно вызывает усилие в датчике Рц под действием произвольного момента. Рассмотрим работу весов, нагруженных в произвольной точке весом Q (фиг. 2). Считая платформу твердым телом, силу Q можно заме1шть силой, приложенной в точке О и моментом . Реакция датчика %+РМ где Рд и Pj - соответственно составляншще, вызванные действием силы Q и моментом М. Из изложенного выше следует, что Р(. Значение силы Рл нетрудно получить, привлекая условия совместности перемещений . (-/«) где соп51 - коэффициент, учитывающий долю силы, воспринимаемую упругими свяJ ЗЯМИ. Таким образом, мы получаем, что силие датчика не зависит От точки приложения взвешиваемого груза. Влийние коэффициента /t компенсируется при регулировке весов. Формула изобретения Весы, содержащие платформу, соедиенную горизонтальными упругими свяями с опорной конструкцией, силоизмеительный датчик и регистрирующий прибор, отличающиеся тем, что, с целью повьипения точности взвешивания, грузоприемная платформа опирается на один датчик в точке, являющейся центром упругого поворота платформы под действием произвольного внешнего момента. Источники информации, принятые во внимание при экспертизе 1.Карпин Е.Б. Средства автоматизации для измерения и дозирования массы. М., 1971, с. 199-201. 2.Авторское свидетельство СССР № 429287,; кл. G 01 G 19/40, 1972 (прототип).
.
Фиг.
