(54) СИСТЕМА ПЕРЕДАЧИ УГЛОВОГО ПОЛОЖЕНИЯ
ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УСТАНОВКИ НУЛЕВОГО ПОЛОЖЕНИЯ СЕЛЬСИНОВ-ПРИЕМНИКОВ | 1972 |
|
SU434441A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1967 |
|
SU190458A1 |
| СЕЛЬСИННАЯ СИСТЕМА ПЕРЕДАЧИ | 1972 |
|
SU358714A1 |
| Следящая система | 1977 |
|
SU728116A1 |
| Устройство для передачи угла поворота вала | 1982 |
|
SU1042059A1 |
| Устройство для дистанционной установки нулевого положения сельсинной передачи | 1983 |
|
SU1103278A1 |
| СОЮУНАЯ ПАТГ.НТНО-ТЕХИКЧЕСЕ..'15ЛИОТЕКА(АИ | 1971 |
|
SU318050A1 |
| гПЧП 'ЗпПП'^РТО?: vUiiA иПаНиГ lutji | 1973 |
|
SU393574A1 |
| Способ управления электродвигателем летучих ножниц | 1949 |
|
SU88439A1 |
| Система дистанционного управления агрегатом | 1959 |
|
SU128923A1 |
I
Изобретение относится к автоматике, в частности к приборам управления кораблем, устройствам управления якорно-швартовными и другими палубными механизмами кораблей и судов, и может быть использовано в других областях народного хозяйства, где применяются подъемно-транспортные механизмы, требующие надежного дистанционного управления.
Известна система следящего управления угловым положением вала, у которой на вращающемся валу управляемого элемента установлены два электрически соединенных сельсинаприемника, и которая снабжена несколькими переменными резисторами, сопротивление каждого из которых соответствует определенному угловому положению управляемого элемента Dj.
Недостатком системы является отсутствие в ней непрерывного контроля углового положения.
Известна система передачи углового положения вала, которая состоит из сельсинов-датчиков и сельсиновприемников, диска со щетками, контактного ролика и скользящих контактов, реле и двух устройств сигнализации (ревуна и звонка). Система обеспечивает непрерывность контроля 2.
Однако наличие в системе сколь10зящих контактов снижает надежность работы.
Цель изобретения - повышение надежности системы переда,чи углового положения вала.
ts
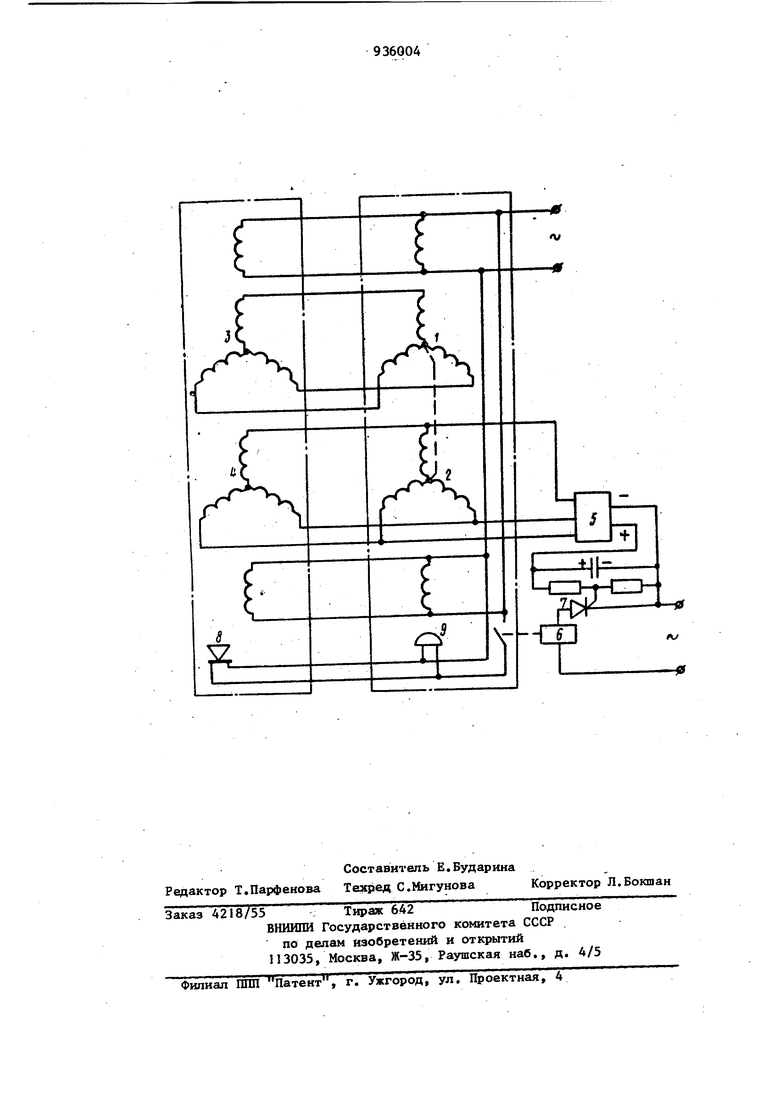
Поставленная цель достигается тем, что в систему передачи углового положения вала, содержащую два . сельсина-датчика и два сельсинаприемника,- обмотки возбуждения ко20торых соединены с источником питаиия, а обмотки синхронизации первых сельсина-датчика и сельсина-приемника и вторых сельсина-датчика и 39 сельсина-приемника соответственно соединены между собой, реле и параллельно соединенные два устройства сигнализации, одна общая точка которых соединена с одним выходом источника питания, а другая - с одним выводом контакта реле, введены выпрямитель и управляющий тиристор, управлякмций электрод которого соединен с выходом выпрямителя, входы которого соединены с обмотками синхронизации второго сельсина-датчика, реле через основную цепь тиристора соединено с источником питания, другой вывод контакта реле соединен с другим выходом источника питания, ро торы сельсинов-датчиков механически, соединены между собой, а второй сель син-приемник выполнен с возможностью фиксации полсокения ротора. На чертеже приведена схема системы передачи углового положения вала. Система содержит сельсины-датчики 1 и 2, сельсины-приемники 3 и 4, выпрямитель 5, реле 6, тиристор 7, устройства 8 и 9 сигнализации (например, ревун 8 и звонок 9) и источник питания (на чертеже не показан) . Система работает следующим образом. При включенном питании угловое положение сельсинов-датчиков I и 2, которые связаны между собой механически, и сельсинов-приемников 3 и 4 совпадают. В цепях синхронизаци сельсина-датчика 2 и сельсина-приемника 4 ток равен нулю. Сигнал на управляющий электрод тиристора 7 не подается, тиристор 7 закрыт. Замыка ющий контакт реле 6 разомкнут, устройства 8 и 9 (ревун В и звонок 9) отключены. При установке.на командном пункте сепьсина-датчика 1 и мех нически связанного с ним сельсинадатчика 2 в требуемое угловое полож ние сельсин-приемник 3 поворачивает на заданный угол. Сельсин-приемник 4 по причине; того, что его ротор зафиксирован, не разворачивается. В результате в цепях синхронизации се сина-датчика 2 и сельсина-приемника 4 возникает ток рассогласования. Этот ток выпрямляется в выпрямителе 5 и подается на управляющий электрод тиристора 7, который открывается и анодным током включает реле 6, Репе 6 своим за лкающим контактом включает устройства 8 и 9 (ревун 8 и зЁонок 9), cи нaлизиpyя о подаче команды. При исполнении команды сельсин-приемник 4 расфиксируется и разворачивается на заданный угол ток рассогласования исчезает, и тиристор 7 закрывается. Реле 6 обесточивается и отключает устройства 8 и 9 (ревун 8 и звонок 9). Экономический эффект от .использования изобретения обусловлен его техническими особенностями. Формула изобретения Система передачи углового положения вала, содержащая два сельсинадатчика и два сельсина-приемника, обмотки возбуждения которых соединены с источником питания, а обмотки синхронизации первых сельсина-датчика и сельсина-приемника и вторых сельсина-датчика и сельсина-приемника соответственно соединены между собой, реле и параллельно соединенные два устройства сигнализации, одна общая точка которых соединена с одним выходом источника питания, а другая - с одним выводом контДкта реле, отличающая сятем, что, с целью повышения надежности системы, в нее введены выпрямитель и управляющий тиристор, управляющий электрод которого соединен с выходом выпрямителя, входы которого соединены с обмотками синхронизации второго сельсина-датчика, реле через основную цепь тиристора соединено с источником питания, роторы сельсинов-датчиков механически соединены между собой, а второй сельсин- приемник выполнен с возможностью фиксации положения ротора. Источники информации, принятые во внимание при экспертизе 1,Заявка Японии № 51-6299, кл, 54(7) D 321, 1976, 2,Хайдуков О,П. и Осокин Б.В. Электрооборудование судов. М., Транспорт. 1974, с. 194 (прототип).
