1
Изобретение относится к автоматическому регулированию и управлению и может быть использовано для решения задач оптимального управления в самообучающихся системах, в системах распознавания, в устройствах моделирования адаптивных биологических процессов.
Известна самоорганизующаяся система, содержащая объект регулирования, ю чувствительные элементы, вычислительное устройство, корректирующие устройства и управляемые ключи CJ.
Недостатками данной системы являются невысокое быстродействие и не- is возможность реализации сложных законов экстремального управления.
Наиболее близким к изобретению техническим решением является самоорганизующаяся система, содержащая ре- М гулятор, сумматор, вход которого соединен с входом системы, а выход с первым входом объекта управления, и последовательно соединенные устройство формирования критерия, экстремальное устройство и устройство управления переключением Г2}.
Недостатком известной системы является малое быстродействие из-за необходимости осуществления полного перебора возможных вариантов структуры системы с целью нахождения оптимального варианта, что при достаточно быстром изменении входного воздействия или возмущения сделает функ ционирование системы неэффективным. Кроме того, вследствие произвольного, выбора порядка перебора вариантов, происходит беспорядочная смена состояний системы.
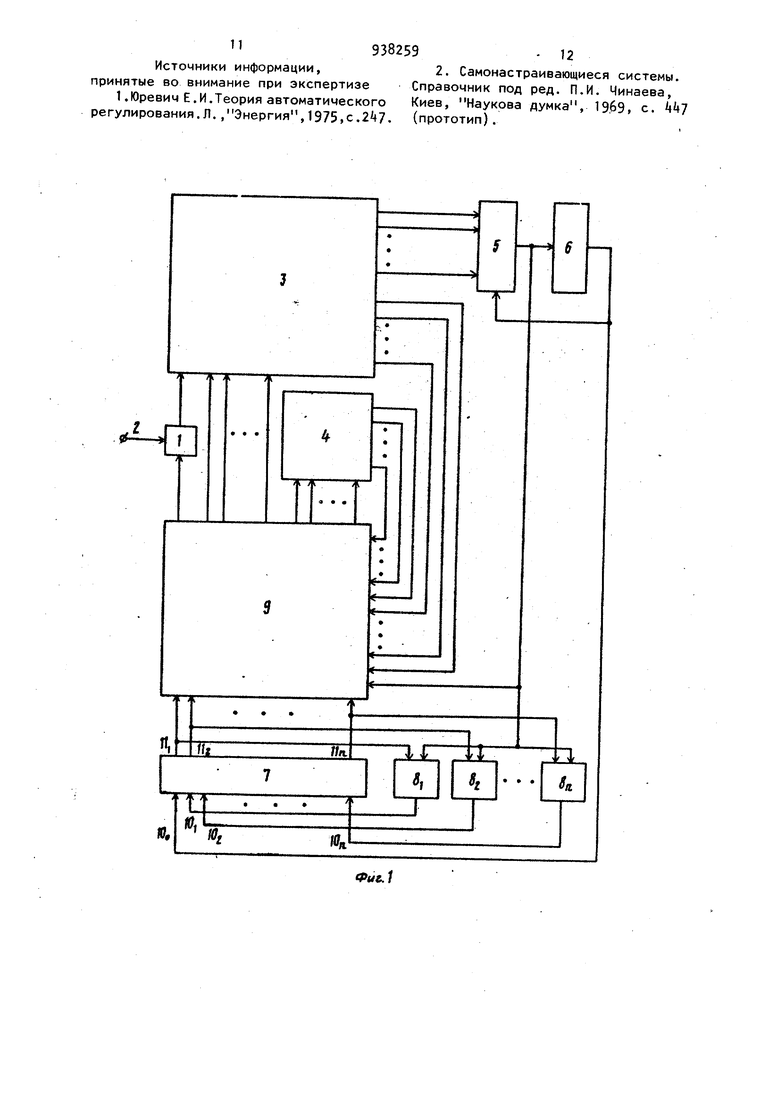
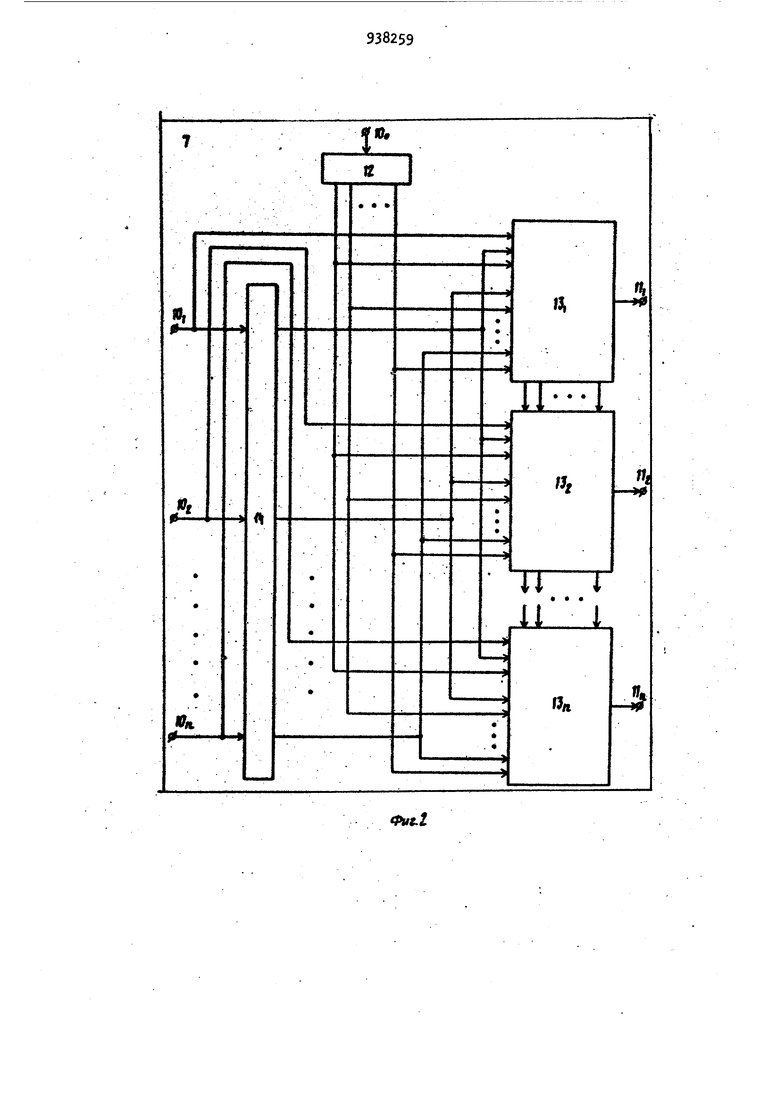
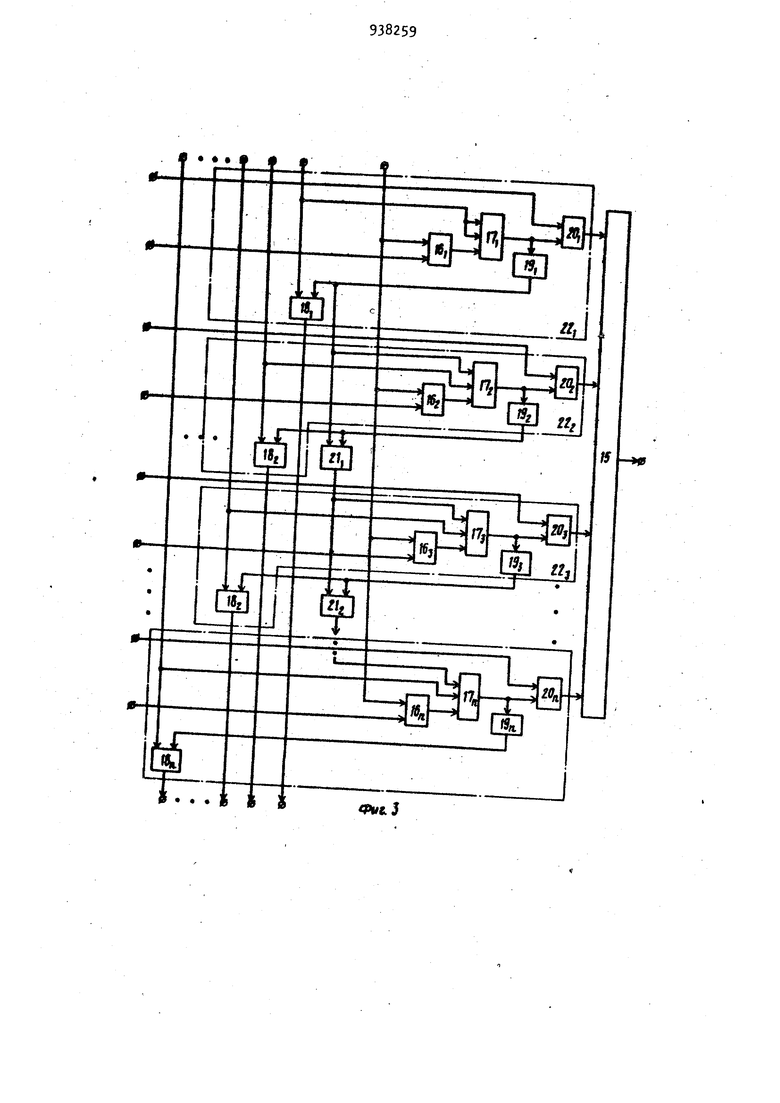
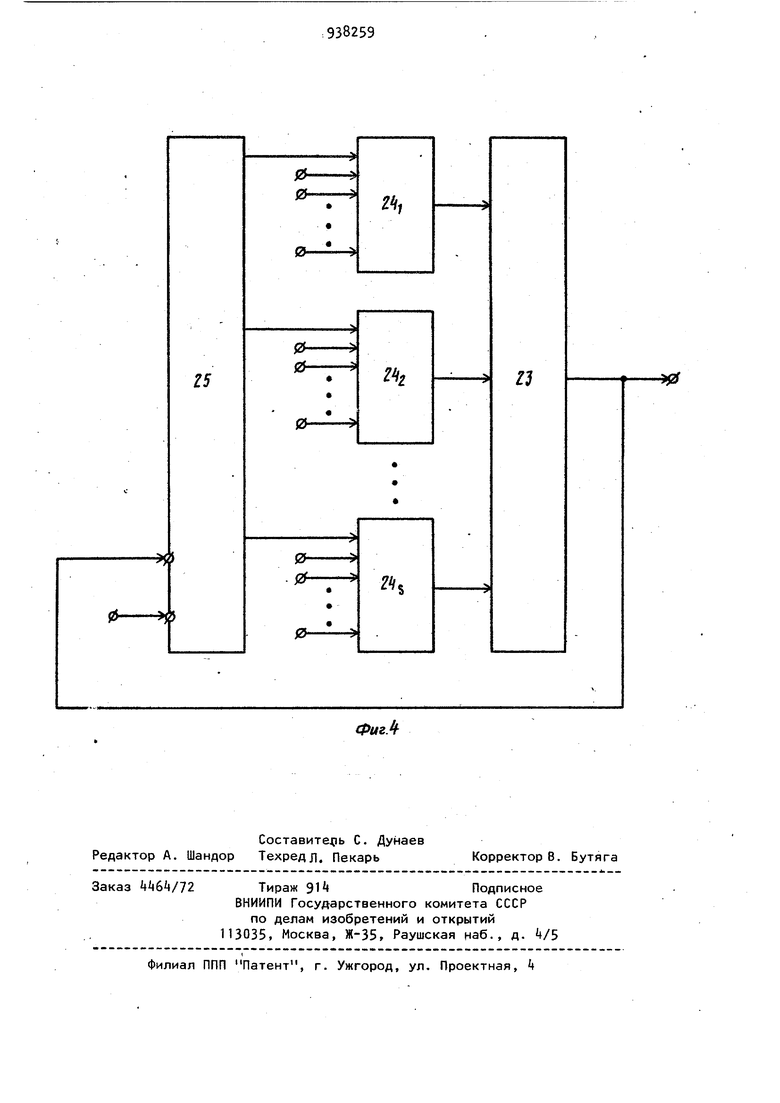
Недостатком известной системы является также то, 5то самоорганизация осуществляется только за. счет изменения внутренней структуры регулятора и не использована возможность изменения связей между регулятором, объектом управления и устройством формирования критерия, а также не393способность решения многокритериальных задач экстремального управления. Цель изобретения - расширение функциональных возможностей и повышение быстродействия системы. Поставленная цель достигается тем что в нее введены анализаторы критериев и коммутационная матрица, первая группа входов которой подключена к выходам регулятора, вторая группа входов - к соответствующим выходам объекта управления, управляющие входи - к соответствующим выходам устройства управления и к первым входам соответствующих анализаторов критериев, вторые входы которых соединены с выходом устройства формирования критерия, а выходы - с соответствующими входами второй группы устройства управления, причем первые выходы коммутационной матрицы подключены к соответствующим входам объекта управления, выходы которого соединены с соответствующими первыми входами устройства формирования критерия , второй вход которого подключен к выходу экстремального устройст ва, а второй выход коммутационной матрицы соединен с вторым входом сумматора, причем третьи входы коммутационной матрицы подключены к соответствующим входам регулятора. Кроме того, устройство управления содержит п блоков идентификации, пер вые входы которых подключены к соответствующим входам блока ранжировки и к входам устройстваj вторые группы входов - к выходам блока ран жировки и к выходам дешифратора, а выходы - к выходам устройства, причем вторые группы выходов каждого предыдущего блока идентификации соединены с соответствующими входами третьих групп последующего блока идентификации. Причем устройство формирования критерия содержит оптимизатор, вь1ходы которого через соответствующие вычислительные блоки подключены к входам блока выделения максимального значения, а первый и второй входы соединены соответственно с первым входом и выходом устройства, причем вторые выходы вычислительных блоков подключены V соответствующим входам устройства, а выход блока выделения максимального значения - к выходу устройства. Причем блок идентификации содержит элемент ИЛИ, выход которого соединен с выходом блока, и п логических блоков, первый вход каждого из которых подключен к первому входу блока, вторые и третьи входы - к соответствующим входам второй группы, четвертые входы - к соответствующим входам третьей группы, первые выходы - к соответствующим входам элемента ИЛИ, а вторые выходы - к соответствующим выходам второй группы выходов блока, причем третий выход первого логического блока соединен с пятым входом второго логического блока, а третий и четвертый выходы логических блоков с второго по (п-1) через соответствующие четвертые элементы И подключены к пятым входам каждого последующего логического блока. Кроме того, логический блок содержит последовательно соединенные анализатор равенства критериев, первый элемент И и второй элемент И, выход которого подключен к первому выходу блока, первый вход через последовательно соединенные инвертор и третий элемент И - к второму выходу блока, а второй вход - к третьему входу блока, первый, второй, четвертый и пятый входы которого соединены соответственно с первым входом анализатора равенства крите|эиев, с вторым входом анализатора равенства критериев, с вторыми входами первого и третьего элементов И и с третьим входом первого элемента И, причем выход инвертора подключен к третьему выходу 3 пятый вход блока соединен с четвертым выходом блока. На фиг. 1 изображена блок-схема самоорганизующейся системы; на фиг.2блок-схема устройства управления; на фиг. 3 - блок-схема блока идентификации; на фиг. - блок-схема устройства формирования .:критерия. Схема содержит сумматор 1, вход системы 2, объект 3 управления, регуля-тор 4, устройство 5 формирования критерия, экстремальное устройство 6, устройство 7 управления, анализаторы критериев, коммутационную матрицу 9, входы , устройства управления, выходы 11 -11f, устройства управления, дешифратор 12, блоки , идентификации, блок 1 ранжировки, элемент ИЛИ 15, анализаторы равенства критериев. 5 первые элементы И 17-1-17,, вторые элементы И ,, инверторы 19-|-1 третьи элементы И ,четвертые элементы И 2Ц-21п(х, логические блоки 22,-22„, блок 23 выделения ма симального значения, вычислительные блоки и оптимизатор 25, где п - число вариантов соединения; S число частных критериев. Функционирование системы осущест вляется следующим образом. Пусть система находится в j-м со стоянии (). Это значит, что на выходе 11j устройства 7 управления появился и поддерживается единичный управляющий сигнал, под действием которого коммутационная матрица 9 осуществляет перекоммутацию соответствующих входов и выходов сумматора 1, объекта 3 управления, элементов регулятора k и устройства 5 формирования критерия, которое формирует значение критерия следующ образом. Используя информацию, пост пающую с соответствующих выходов объекта 3 управления, в вычислитель ных блоках 2 вычисляется значение соответствующего частного критерия 5 , которое делится на соответствуимцее оптимальное значение критерия , поступающее на первый вхо вычислительного блока 2k с соответст вующего выхода оптимизатора 25. На выходе блоков 2 появляется величина (ij)ч SonT i / Устройство 23 выделения максимального значения осуществляет выбор наибольшей из этих величин, которая и выдается на выход устройства 5 формирования критерия в качестве зна чения критерия. Это значение поступа ет на вход экстремального устройства 6 и первые входы анализаторов 8х,,8п,.. ,8| критериев. Под воздействием управляющего сигнала с выхода 11.- это значение критерия записывает ся в анализатор 8.- критериев, вырабатывающий и запоминающий значение оценочной меры близости j-го варианта соединения к оптимальному варианту соединения. Содержимое анализаторов 8 поступает на соответствующие входы 10.,-10гт устройства 7 управления, которое осуществляет переупорядочение варианта соединения в соответствии с полученной для каждого варианта оценочной мерой близости. 9 Это упорядочение осуществляется следующим образом. Значения мер близости через входы поступают на первые входы соответствующих блоков 13и-13и идентификации и соответствующие входы блока ранжировки, которые осуществляют упорядочение величин мер близости так, что эти величины на выходах блока ранжировки образуют монотонную последовательность при последовательном изменении номеров с соответствующих выходов (располагаются в порядке возрастания или убывания). Упорядоченные значения мер близости с выходов блока И ранжировки поступают на соответствующие входы второй группы входов блоков индентификации , которые устанавливают взаимно-однозначное соответствие между величинами мер близости на входах и выходах блока I ранжировки, тем самым устанавливая оценочный порядок смены состояний. Для этого, например, в блоке 13yj идентификации () значение меры близости с выхода анализатора 8 сравнивается попарно с значениями мер близости на кг,ждом из выходов блока 14 ранжировки. Установление единственного равенства в данном блоке означает установление взаимно-однозначного соответствия. Если такое равенство в данном блоке не единственное (что может произойти из-за возможного равенства значений мер близости в разных состояниях) , фиксируется одно из этих равенств и за счет выработки соответствующего сигнала подавляются сигналы, соответствующие другим равенствам в этом блоке. Кроме этого, за счет поступления сигнала с соответствующего выхода второй группы выходов блока 1Зх идентификации (1 Xv п) в последующие блоки идентификации через соответствующий вход третьей группы входов блока 13х+-1 этих блоках идентификации подавляются сигналы равенства, вызванные значением меры близости с уже идентифицированного в данном блоке идентификации выхода блока ранжировки. Число этих входов и выходов равно возможному числу равенства, т.е. равно п. При этом на выходе первого элемента И 17 блока 13х появится сигнал в соответствии с следующим выражениемx,vEaM(.s,,s,,)«,(0,,S,0,,&,... ,,н),.aMнv) величина меры близости на х-м -входе устройства ранжиров ки; величина меры близости на у-м выходе блока ранжировки; значение сигнала на выходе анализатора равенства критериев 16 блока 13х значение сигнала на выходе первого эле мента 1 7j блока идентификации значение сигнала на выходе первого элемента И 17- блоказначение сигнала .на выходе инвертора 19 блока / л J X значение сигнала выходе инвертора 19NJ блока 13х Uy . Of и -значение сигнала Vll Х|Ч A|J1 выходе четвертого элемента И 21 у бло ка 13х; .« «SO.M,.значение сигнала н выходе третьего элемента И IS бло ка 13x-f Данное соотношение показывает, что для каждого значения х существует единственное значение у , такое что Uj( 1 и наоборот, для каждого значения у найдется единственно значение х такое, что Uxy , т.е между X и у устанавливается взаимно однозначное соответствие. Одновременно значение критерия, поступающе го с выхода устройства 5 формирования критерия поступает в экстремаль ное устройство 6, где сравнивается с предыдущим значением и, в зависимости от результата, вырабатывается 9 . - 8 величина управляющего воздействия, которое поступает на вход Юд устройства 7 управления и на вход дешифратора 12. На соответствующем т-м ( п) выходе появляется сигнал, который поступает на т-е входы первых групп входов блоков 13 идентификации. Этот сигнал вызовет появление сигнала управления на выходе 11 того из блоков 13 в котором установлено соответствие с сигналом т-го выхода блока И ранжировки. Таким образом, система переходит в новое состояние. При достижении системой оптималь ного состояния, значение регулирующего воздействия с выхода экстремального устройства 6 поступает на первые входы устройства 5 формирования критерия и оптимизатора 25, в результате чего вырабатываются новые оптимальные значения частных критериев, достижение которых должно быть обеспечено за счет самоорганизации. Эти значения вырабатываются воздействием анализа значения Критерия в достигнутом состоянии, поступающего на второй вход оптимизатора 25 с выхода блока 23 выделения максимального значения. Увеличение быстродей.ствия и расширение функциональных возможностей известного устройства за счет возможности самообучения и способности удовлетворять совокупности частных критериев расширяет область его Применения. Например, система может функционировать в условиях быстрого изменения возмущающего воздействия, когда нельзя замерить несколько значений показателя качества при одйом и том же значении возмущеющего воздействия. Для этого необходимо, чтобы анализатор критериев мог и вычислять статистические характеристики случайного процесса, например математические ожидания значений критериев в соответствующих состояниях. В случае отсутствия случайных помех функции анализатора критериев могут быть сведены лишь к записи и хранению соответствующих значений критерия. Система может быть использована в задачах оптимального проектирования, которые всегда являются многокритериальными. Таким образом, применение предлагаемой системы позволит получить определенный технико-экономический эффект. Формула изобретения 1. Самоорганизующаяся система, содержащая регулятор, сумматор, вход которого соединен с входом системы, а выход - с первым входом объекта уп равления, и последовательно соединен ные устройство формирования критерия экстремальное устройство и устройство управления, отличающаяс я тем, что, с целью расширения функциональных возможностей и повышения быстродействия системы, в нее введены анализаторы критериев и коммутационная матрица, первая группа входов которой подключена к выходам регулятора, вторая группа входов - к соответствующим выходам объекта управления, управляющие входы - к соответствующим выходам устройства управления и первым входам соответствующих анализаторов критериев, вторые входы которых соединены с выходом устройства формирования критерия а выходы - с соответствующими входами вtopoй группы устройства управления, причем первые выходы коммутационной матрицы подключены к соответствующим входам объекта управления, выходы которого соединены с соответствующими первыми входами устройства формирования критерия, второй вход которого подключен к выходу экстремального устройства, а второй выход коммутационной матрицы соедине с вторым входом сумматора, причем третьи выходы коммутационной матрицы подключены к соответствующим входам регулятора. 2. Система по п. 1, о т л и ч.ающаяся тем, что устройство управления содержит п блоков иден тификации, первые входы которых подключены к соответствующим входам блока ранжировки и к входам устройст ва , вторые группы входов - к входам блока ранжировки и к выходам дешифратора, а выходы - к выходам устройства, причем вторые группы выходов каждого предьщущего блока идентификации соединены с соответствующими входами третьих групп последующего блока идентифи кации. 9 910 3. Система по п. 1, о т л и ч ающаяся тем, что yctpoйcтво формирования критерия содержит оптимизатор, выходы которого через соответствующие вычислительные блоки подключены к входам блока выделения максимального значения, а первый и второй входы соединены соответственно с первым входом и выходом устройства, причем вторые входы вычислительных блоков подключены к соответствущим входам устройства, а выход блока выделения максимального значения - к выходу устройства. 4. Система по п. 2, отличающаяся тем, что блок идентификации содержит элемент ИЛИ, выход которого соединен с выходом блока, и п логических блоков, первый вход -каждого из которых подключен к первому входу блока, вторые и третьи входы - к соответствующим входам вторюй группы, четвертые входы - к соответствующим входам третьей группы, первые выходы - к соответствующим входам элемента ИЛИ, а вторые выходы - к соответствующим выходам второй группы выходов блока, причем третий выход первого логического блока соединен с пятым входом второго логического блока, а третий и четвертый выходы логических блоков с второго по (n-l) через соответствующие четвертые элементы И подключены к пятым входам каждого последующего логического блока. 5- Система поп. A,oтличaющ а я с я тем, что логический блок содержит последовательно соединенные анализатор равенства критериев, первый элемент И и второй элемент И, выход которого подключен к первому выходу блока, первый вход через последовательно соединенные инвертор и третий элемент И - к второму выходу блока, а второй вход - к третьему входу блока, первый, второй, четвертый и пятый входы которого соединены соответственно с первым входом анализатора равенства критериев, с вторым входом анализатора равенства критериев, с вторыми входами первого и третьего элементов И и с третьим входом первого элемента И, причем выход инвертора подключен к третьему выходу блока, а пятый вход блока соединен с четвёртым выходом блока.
11938259-12
Источники информации,2. Самонастраивающиеся системы,
принятые во внимание при экспертизе Справочник под ред. П.И. Чинаева,
1 .Юревич Е.И.Теория автоматического Киев, Наукова думка, 1Э,6Э, с. регулирования,Л..Энергия,. (прототип).
I
ьо-Ьм
..AJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Экстремальный регулятор шагового типа | 1974 |
|
SU551605A1 |
| ПНЕВМАТИЧЕСКИЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1971 |
|
SU299828A1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| Система управления процессом нагрева с использованием моделирующего устройства | 1977 |
|
SU673984A1 |
| Устройство для поиска экстремальных чисел | 1980 |
|
SU883895A1 |
| Устройство для управления движениемплАВучЕгО СЕйСМОРАзВЕдОчНОгО КОМплЕКСА | 1978 |
|
SU842724A1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ | 1972 |
|
SU341012A1 |
| Цифровой многомерный оптимизатор | 1989 |
|
SU1689919A1 |
/7,
Я
til
№
Wj
Пг
a n,
4ilvfc J
ФигЛ
