( 51 ) УСТРОЙСТВО для УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2143384C1 |
| Устройство для укладки предметов в тару | 1983 |
|
SU1138346A2 |
| Устройство для укладки штучных изделий | 1977 |
|
SU729104A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2137686C1 |
| Устройство для укладки предметов в тару | 1990 |
|
SU1724520A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2008 |
|
RU2375271C1 |
| Устройство для укладки штучных предметов | 1976 |
|
SU648468A2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1994 |
|
RU2091277C1 |
| Устройство для укладки предметов в тару | 1986 |
|
SU1359200A1 |


Изобретение относится к упаковочным машинам для штучных предметов, более точно к устройствам для укладки банок в ящики.
По основному авт.св. 878654 из- . вестно устройство, содержеицее питатель предметов, укрепленный на гори-зонтальном валу ротор с радиальными захватами, смонтированными на параллельных оси ротора дополнителыилх валах, установленных с возможностью пульсирующего вращения, с возможностью двух одновременных движений: вращения относительно осей, параллельных валу ротора, и возвратно-поступательного перемещения перпендикулярно этим .
Недостатками известного устройства являются большие инерционные нагрузки при холостых движениях захватов и сложность конструкции.
Цель изобретения - уменьшение ч инерционных нагрузок при холостых ., движениях захватов и упрощение конструкций.
Для достижения поставленной цели концы дополнительных валов выполнены в виде консолей, расположенных за пределашш торца вала ротора, а захна-.
ты жестко закреплены непосредственно на концах дополнительных валов.
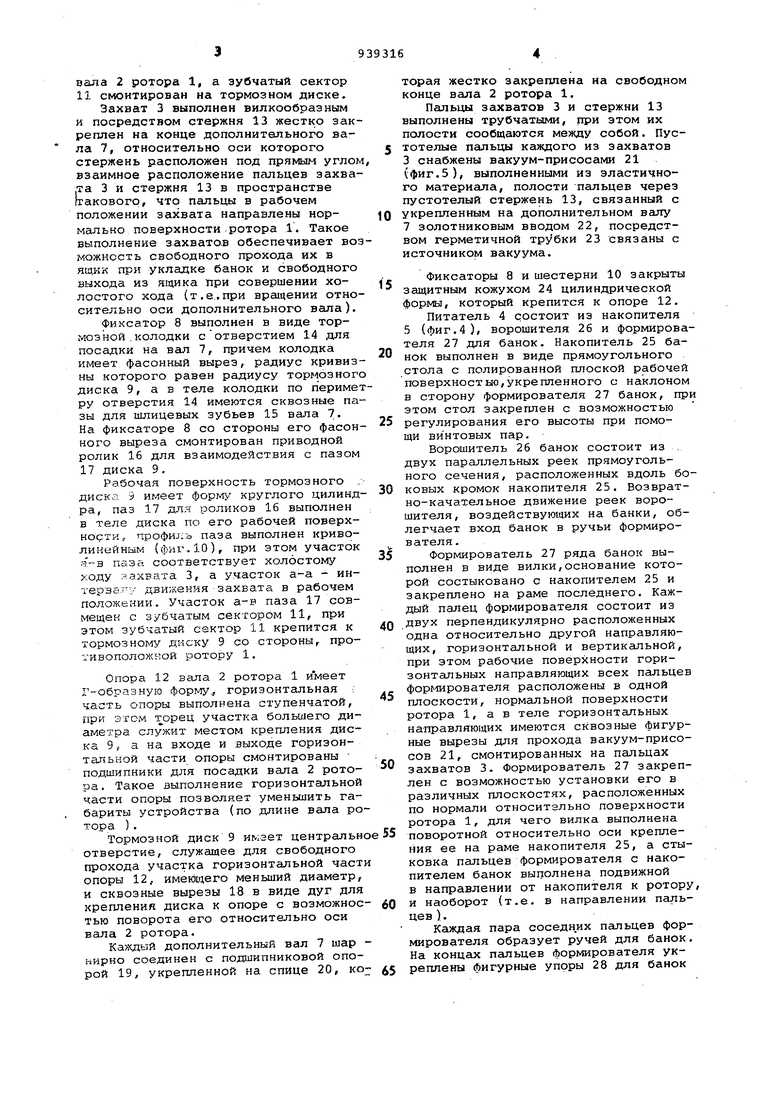
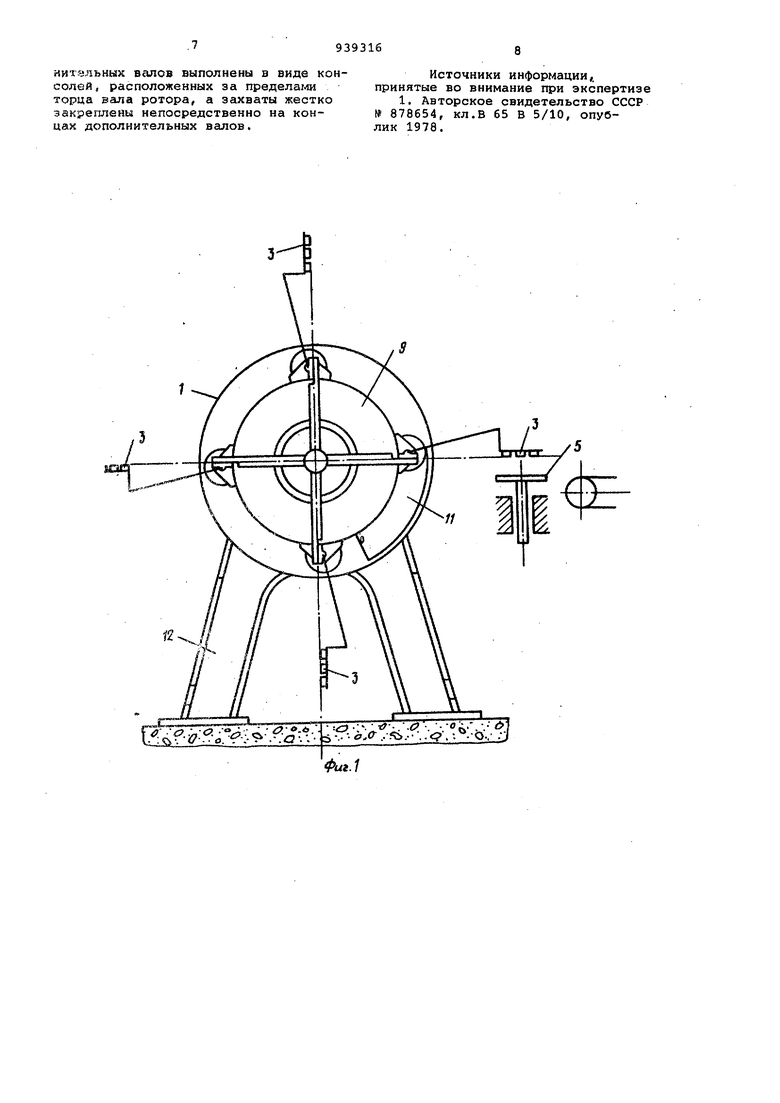
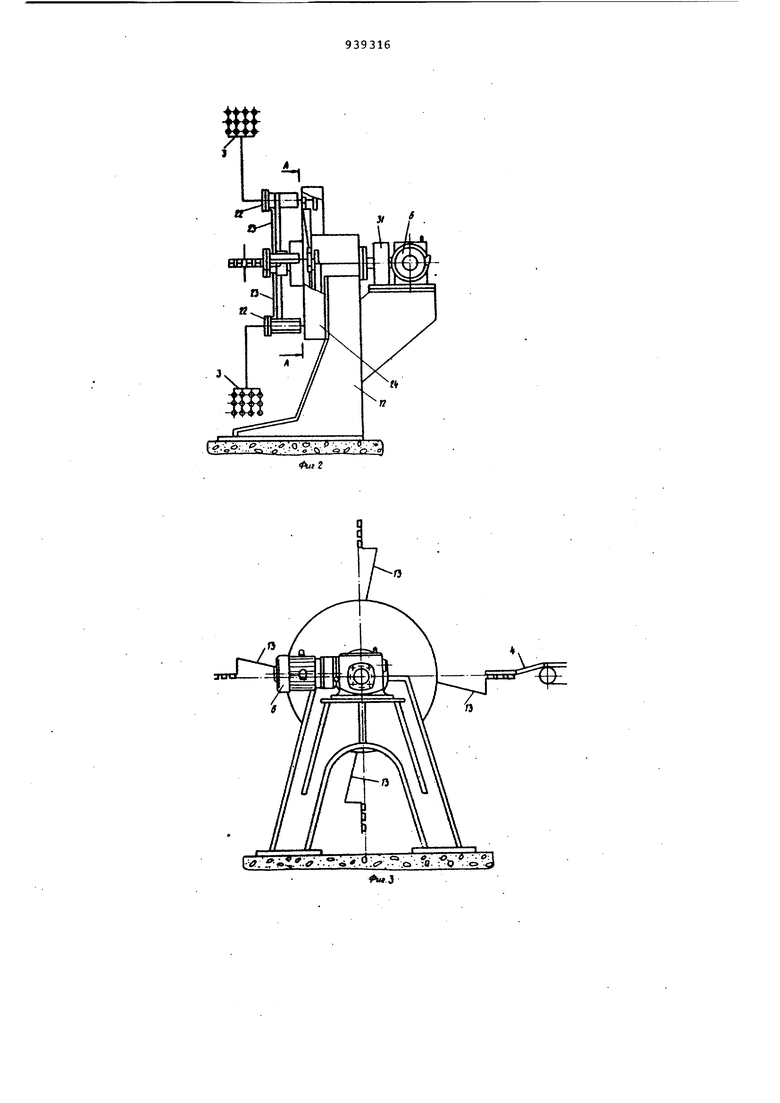
На фиг.1 изображено устройство, вид спереди; на фиг.2 - то же, вид сбоку; на фиг. 3 - то же, вид сзади; на фиг. 4 - то же, вид сверху; на фиг. 5 - механизм захвата; на фиг. 6 - разрез А-А на фиг.2; на фиг. 7 разрез Б-Б на фиг.6; на фиг. 8 - раз10рез В-В на фиг.6; на фиг. 9 - разрез Г-Г на фиг.6; на фиг.10 - разрез Д-Д на фиг.9; на фиг. 11 - фиксатор; на фиг. 12 - развертка рабочей поверхности тормозного диска.
15
Устройство содержит ротор 1, укрепленный на горизонтальном валу 2, с радиальными захватами 3, питатель 4 предметов, опору 5 для тары и при20вод 6.
Каясдый захват 3 смонтирован на конце дополнительного вала 7, выполненного в виде консоли, расположенной за пределами торца вала 2 ротора
25 1, на другом конце дополнительного вала 7 смонтирован фиксатор 8 для взаимодействия с тормозным диском 9 и шестерня 10 для взаимодействия с зубчатым сектором 11, при этом тормозной диск 9 закреплен на опоре 12
30 вала 2 ротора 1, а зубчатый сектор 11 смонтирован на тормозном диске. Захват 3 выполнен вилкообразным и посредством стержня 13 жестко зак реплен на конце дополнительного вала 7, относительно оси которого стержень расположен под пря№1м угло взаимное расположение пгшьцев захва ,та 3 и стержня 13 в пространстве аковогр, чтсз пальцы в рабочем положении захвата направлены нормально поверхности ротора 1. Такое выполнение з.ахвато.в обеспечивает во можность свободного прохода их в ящик при уклсщке банок и свободного выхода из ящика при совершении холостого хода (т.е..при вращении отно сительно оси дополнительного вала). Фиксатор 8 выполнен в виде тормозной .колодки сотверстием 14 для посадки на вал 7, причем колодка имеет фасонный вырез, радиус кривиз ны которого равен радиусу тормозног диска 9, а в теле колодки по периме ру отверстия 14 имеются сквозные па зы для ишицевых зубьев 15 вала 7. На фиксаторе 8 со стороны его фасон ного выреза смонтирован приводной ролик 16 для взаимодействия с пазом 17 диска 9. Рабочая поверхность тормозного ДИСК.Э. 9 имеет круглого тдилинд ра, паз 17 для роликов 16 выполнен в теле диска по его рабочей поверхнорти, профиль паза выполнен криволинейным ((Ьиг.Ю), при этом участок а--в пз.за соответствует холостому ходу : ахвата 3, а участок а-а - интерзагу движения захвата в рабочем положении. Участок а-в паза 17 совмещен с зубчатым сектором 11, при этом зубчатый сектор 11 крепится к тормозному диску 9 со стороны, противоположной ротору 1. Опора 12 вала 2 ротора 1 имеет Г-образную форму., горизонтальная : часть опоры выполнена ступенчатой, при этом торец участка большего диаметра служит местом крепления диска 9 а на входе и выходе горизонтальной части опоры смонтированы подшипники для посадки вала 2 ротора. Такое вы.полнение горизонтальной части опоры позволяет уменыиить габариты устройства (по длине вала ро тора ) . Тормозной диск 9 имэет центральн отверстие, служащее для свободного прохода участка горизонтальной част опоры 12, имеющего меньший диаметр, и сквозные вырезы 18 в виде дуг для крепления диска к опоре с возможное тью поворота его относительно оси вала 2 ротора. Каждый дополнительный вал 7 шар нирно соединен с подшипниковой опорой 19, укрепленной на спице 20, ко торая жестко закреплена на свободном конце вала 2 ротора 1. Пальцы захватов 3 и стержни 13 выполнены трубчатыми, при этом их полости сообщаются между собой. Пустотелые пальцы каждого из захватов 3 снабжены вакуум-присосами 21 (фиг.5), выполненными из эластичного материала, полости пальцев через пустотелый стержень 13, связанный с укрепленным на дополнительном валу 7 золотниковым вводом 22, посредством герметичной трубки 23 связаны с источником вакуума. Фиксаторы 8 и шестерни 10 закрыты защитным кожухом 24 цилиндрической формы, который крепится к опоре 12. Питатель 4 состоит из накопителя 5 (фиг.4), ворошителя 26 и формирователя 27 для банок. Накопитель 25 банок выполнен в виде прямоугольного стола с полированной плоской рабочей поверхностно,укрепленного с наклоном в сторону формирователя 27 банок, при этом стол закреплен с возможностью регулирования его высоты при помощи винтовых пар. Ворошитель 26 банок состоит из . двух параллельных реек прямоугольного сечения, расположенных вдоль боковых кромок накопителя 25. Возвратно-качательное движение реек ворошителя, воздействующих на банки, облегчает вход банок в ручьи формирователя. Формирователь 27 ряда банок выполнен в виде вилки,основание которой состыковано с накопителем 25 и закреплено на раме последнего. Каждый палец формирователя состоит из двух перпендикулярно расположенных одна относительно другой направляющих, горизонтальной и вертикальной, при этом рабочие поверхности горизонтальных направляющих всех пальцев фop Iиpoвaтeля расположены в одной плоскости, нормальной поверхности ротора 1, а в теле горизонтальных направляющих имеются сквозные фигурные вырезы для прохода вакуум-присосов 21, смонтированных на пальцах захватов 3. Формирователь 27 закреплен с возможностью установки его в различных плоскостях, расположенных по нормали относитзльно поверхности ротора 1, для чего вилка выполнена поворотной относительно оси крепления ее на раме накопителя 25, а стыковка пальцев формирователя с накопителем банок выполнена подвижной в направлении от накопителя к ротору, и наоборот (т.е. в направлении пгшьцев ). Каждая пара соседн.их пальцев формирователя образует ручей для банок. На концс1х пальцев формирователя укреплены фигурные упоры 28 для банок (по два на каждый ручей). Один из упоров в каждом ручье снабжен датчиком наличия банок, при этом все датчики соединены последовательно и . блокированы системой автоматического управления с приводом 6 ротора 1 для подвода захватов 3 к формирователю 27 только при наличии в ручьях формирователя 27 полного комплекта бано Для исключения остановки ротора в период после захвата банок вакуумприсосами и снятия их с формирователя до.окончания формирования нового (ряда банок предусмотрен конечный выключатель 29, вмонтированный в боковину паза 17 тормозного диска 9, нормально замкнутые контакты которого соединены параллельно с контактами датчиков наличия банок. Над входной частью формирователя 27 перпендикулярно его пальцам установлена подпружиненная планка 30, служащая для предотвращения опрокидывания банок, находящихся на накопителе, но контактирующих с крайними банками в ручьях формирователя при подъеме комплекта банок вакуум-присосами. Для обеспечения остановки ротора 1 при работающем электродвигателе приводного устройства последнее снаб жено электромагнитной муфтой 31. . Устройство работает следующим образом. Предварительно включается в работу ворошитель 26 и транспортер подачи банок на накопитель 25. После образования полного комплектабанок ,на формирователе 27 подается пустой ящик в позицию загрузки, затем включается в работу привод 6, обеспечивающий вращение ротора 1 с захватами 3. Пальцы захватов 3, проходя между пальцами формирователя 27, захватывают вакуум-присосами 21 банки, находящиеся в ручьях формирователя, и переносят их в позицию загрузки. При вращении ротора 1 ролики 16 фиксаторов 8, перемещаясь в пазу 17 тормозного диска 9, перемещают фиксаторы, на которых они смонтированы вдоль осей дополнительных валов 9. В позиции загрузки зубья 15 шлицев дополнительного вала 7 выходят из зацепления со шлицами фиксатора 8, в результате чего последний перестает запирать захват 3 в рабочем положении {фиг. 10 .точка а). По окончании выхода шлицев из зацепления шестерня 10 входит в зацепление с зубчатым сектором 11, в -вакуум-присосах 21 разрежение сменяется избыточным давлением и банки устанавливаются на дно ящика или на расположенный ниже ряд банок, также находящихся в ящике Вал 7 продолжает поворачиваться вместе с ротором 1, при этом, посКОЛЬКУ шестерня 10 взаимодействует с зубчатым сектором 11, жестко связанной системе стержень 13 - захват 3 сообщается вращательное движение относительно оси вала 7. В результате этого захват 3 выходит из ящика, проходит мимо опорного приспособления 5, не контактируя с последним, и до подхода к формирователю 27 завершает полный оборот. После поворота захвата 3 на ЗбО шестерня перестает взаимодействовать с зубчатым сектором 11, шлицы фиксатора 8 входят в зацепление с зубвями 15 шлицев вала 7, в, результате чего захват 3 запирается в рабочем положении (фиг. 10, точка в) . | При подходе захвата 3 к формирователю 27 ролик 16 фиксатора 8 на жимает на конечный выключатель 29 и размыкает его контакты, при этом, если форглирователь 27 заполнен банками, ротор 1 продолжает вращение, если же ряд банок не сформирован, ротор 1 посредством электромагнитной муфты 31 останавливается при работающем электродвигателе, по окончании формирования комплекта банок в формирователе контакты датчиков наличия банок замыкаются и ротор 1 автоматически включается в работу. После загрузки ряда банок в ящик опора 5 опускает ящик на расстояние, равное высоте банки, а -после наполнения ящика выводит его из устройства, подавая под загрузку пустой ящик. Использование предлагаемого устройства позволяет уменьшить динамические нагрузки, возникающие при холостых движениях захватов, и упростить конструкцию. Уменьшение нагрузок, достигаемое без снижения скорости движения рабочих органов (вакуум- присосов ), в свою очередь позволяет повысить производительность устройства за счет увеличения коэффициента использования цикловой производительности (т.е.путем уменьшения внецикловых потерь производительности ). Жесткое закрепление захватов непосредственно на концах дополнительных валов упрощает конструкцию и способствует повышению ее надежности. Формула изобретения Устройство для укладки штучных предметов по авт.св. № 878654, о тличающееся тем, что, с целью уменьшения инерционных нагрузок при холостых движениях захватог, и упрощения конструкции, концы дополнитэльнык валов выполнены в виде консолей, расположенных за предела1 1И торца вала ротора, а захваты жестко закреплены непосредственно на концах дополнительных валов.
Источники информации/, принятые во внимание при экспертизе
fB
8
n
21
г-г
А:±.
hi.10
л
Фи.11
