Изобретением является усгройстпо для аитоматпчегко перегрузки л,и.1И11Др11чоских изделлГ с рабочего агрегата на транспортер, с нзменепием их ориептироикл (олрокидьпзаннс.м) и соотнетствил е iiaiipaisneiiiioM noToiva.
Перегружатель нрзгппмает цплнндрнчегкие изделия, обрабатываемые в верт1и;алышл1 лоложении но одному нлл но несколько Н1тук л укладыг,ает принятые нзделия нх цлллндрпческоГ iioiieixxiiocTbio на наклонный; скллз, чем обосиечтшется скатывание нзделн11 но склнзу нод действием собственного песа.
Известны нерегруяхателн, в которых обрабатьитемме 18дел11я нсроводятся Jt3 вертикального к 1ч)рнзоптал1 т1ое голо кение.
Онисмваемыи перегружатель отлнчается от известных тем, что. с целью возможности иеремеи1;ения свободно установленных и.зделиС Кз вертикального ло.чожелия к горизоитальиое, ои выиолиеи и виде жшоротио монтированных столиков, оси которых ири вертикальном перемеии-иии 1чор11уса 1 за1 модеГ|ству от через рычаг с ку.чаком, жестко укреилениым на стан)1не иерегружателя, иричем. столнки сиабукеиы оиориыми .ткамн, удерживак) изделие нри оирокидываиии.
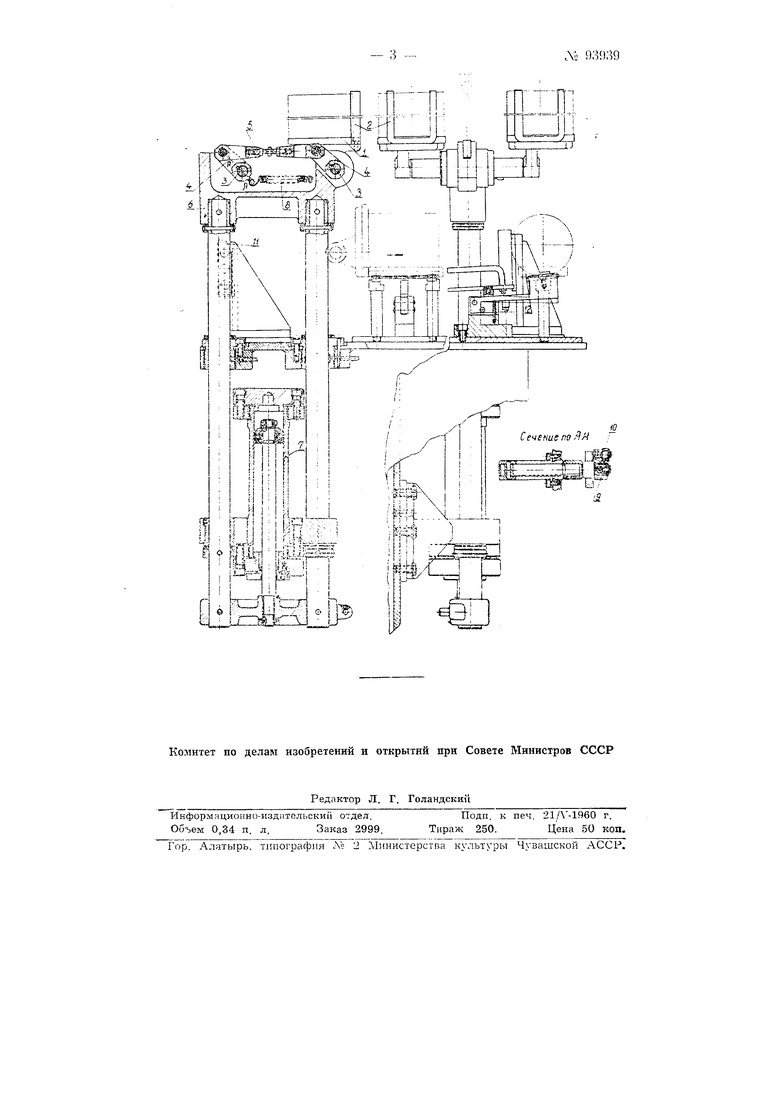
Иа черте/ко показан общий вид иерегружателя в двух И 1оекииях. и сечеиие ио АА.
Оорг.батынае.мыс изде.чия, находян1,11еся в вертикальном но.чои.чмпти, ирииимаются O,HJUIM, двумя или несколькими столиками 1. имекпцимп вертикальные вилки 2. Столики моитиро1 аиы иа осях 3. вокруг которых ОТ1И могут качаться. Оси столиков связаиы между co6oir гтгстелгой рычаго 4 и тяг 5, образук)И1,нх И1ариириые четырех;;| еии1ИхИ. Оси 3 мо71тлрованы дшвторно в корнусе 6, который мо/кет геремен;аться в вертикальной илоскости но наиравляющим, получая ;,1П1ження от гидравлического цилиндра 7.
№ 93939
Одтш 113 )ыча|()1 C7 H:iaii с пружпно : 8, которая ст|.)ом11тся noisopлуть столики так, чтобы мх площадки заняли горизоиталыгое цоло.кепио. 8 натиппшет систсзму на упор, pcry.)oi,Koii которого оиродсляотся положение столпко. На одной из осой 3 roIlT Ipo aн )i rчаг 9, снабиамшый роликом 10. При иертпкалыюм персме1цег 1п столнкок сверху И1И13 из. нротяжон 1и нерпой чаетн, пути, столнки; остаются J горнзоптал1 11ом ноложеннн; далее ролшч 10 нстречает J;yлaк И, который заста1 ляет повернугься оси столнко п, сл(до ателы1(). сами сто,лнк11. Прн отом изделия, стоя.щне на столиках верти )Но, }1ачниают новорачштться. и ложатся ги лиидрическимн ноперхностилш Tta вилки 2, При нижнем положении столнко лздолня лежат на пилках, а их осн ааннмают 1Ч)рнно11талыи)е положение.
При дальне11Н1ем двнженнц столшчои инлки утанлшииотся, а изделня ()каз1)П;а1отся в свободном состояннн на салаз1;а 12, но |;отч)рым они 1г катятся далыне.
Расположение столшчО , относительно нанранлення иотока .юи-;ет быть в)1браио таким, 4To6i,i нзделня оказьн а,мнсь в одном нлн разных желобах С1ч,:1нза, HpHiejM, .можот бь1ть o6)a3oi,aii одни или нес1;олы;о нарал; елт,ных HOTOI-JOH изделий.
11 р е д м е т и з о б р е т е н и я
1.Литоматнческий нере1ружате,1Г) цн,:1И 1дрнческнх изде.ли с онрокидьишнием их, о т л и ч а ю HI; и и с я тем, что, с 1(с,лг5то jioaMonaiocTii указанного неремощення оюбодш) установленн1.1х изделий, автоматический нерегружатоггь вьпнхлнен is виде иопоротно .монтированнтих столнкои, оси .1х при и .чггнкальио.м неремещеннп i;oj)Hyca г.зан одейстнуют через рычаг с кулаком, Илестко нрикрен,:нчи1ыл i сташгне иерегру/кателя, н которь е снабжены иертнкальны.мн .пг, нрншгмакнцимн на себя нзде.тие нри его онро1;нд,1ианин.
2.Форма вынолнеиня нерегружате.чя но нункту I, о т ,л и ч а ющ а я с г тем, что, с нелыо одноиременного новорачпиання иеско.льких столнкои, осн нх связаны между co6oii снстемой рычагои н тяг.
DZJ ji|
Щ 1Г
%нТТ
zd
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия агрегатных станков для механической обработки поршней и тому подобных деталей | 1950 |
|
SU94814A1 |
| Автомат для контроля ширины канавок под поршневые кольца и высоты поршня двигателя внутреннего сгорания | 1950 |
|
SU95869A1 |
| Устройство для транспортирования с одной позиции на другую изделий в процессе их обработки | 1950 |
|
SU93673A1 |
| Горизонтальный автоматический хонинговальный станок | 1950 |
|
SU94962A1 |
| Приспособление для автоматического контроля расположения цилиндрических изделий, в частности поршней, при их обработке | 1950 |
|
SU93394A1 |
| Автоматическое устройство для загрузки конвейера | 1950 |
|
SU95193A1 |
| Транспортер для перемещения цилиндрических изделий | 1950 |
|
SU93837A1 |
| Устройство для автоматического управления загрузкой меж агрегатного склиза | 1950 |
|
SU94708A1 |
| Автоматическое устройство для контроля заданного расположения цилиндрических изделий, в частности поршней, при их транспортировании | 1950 |
|
SU93465A1 |
| Автоматический завод по изготовлению поршней и подобных им изделий | 1950 |
|
SU94577A1 |