, 1
Изобретение относится к весодозировочной технике, в частности к непрерывному весовому дозированию сыпучих материалов и может быть использовано в химической, металлургической, пищевой, дорожно-строительной и других отраслях народного хозяйства.
Известны дозаторы непрерывного действия, в которых регулирование производительности осуществляется изменением скорости движения ленты транспортера, в таких дозаторах масса материала, находящегося в данный момент на грузоприемном устройстве, измеряется целиком 1.
Однако известное устройство не обеспечивает достаточную точность.
Наиболее близким по технической сущности является устройство/ (Содержащее загрузочное устройство, установленное над питателем с приводом, грузоприемное устройство с контргрузом, связанное с преобразователем силы, преобразователь ско рости ленты транспортера, выход которого соединен с входом множительного устройства, к другому входу которого подключен выход преобразователя силы, задатчик производительности, связанный через блок сравнения с регулятором, выход которого через усилитель мощности соединен с приводом питания 2.
Недоста±ок известного дозатора состоит в том, что он не обеспечивает требуемую точность дозирования-, так как точность измерения производитель10ности в основном определяется абсолютной погрешностью установленного преобразователя силы, которая зависит от его наибольшего предела .измерения, а также колебаний
15 температуры и влажности воздуха в технологических помещениях, достигаиощих значительных перепадов (-40 - +40°С и 65-90%).
Целью изобретения является по20вышение точности дозирования.
Цель достигается тем, что в устройство введены блок суммирования и блоки умножения на постоянный
25 коэффициент, вход однйго из которых соединен с выходом множительного устройства, а вход другого с выходом преобразователя скорости, а выходы блоков умножения на постоян 0|ный коэффициент соединены со вход с1ми блока суммирования, выход которого подключен к входу блока сравнения.
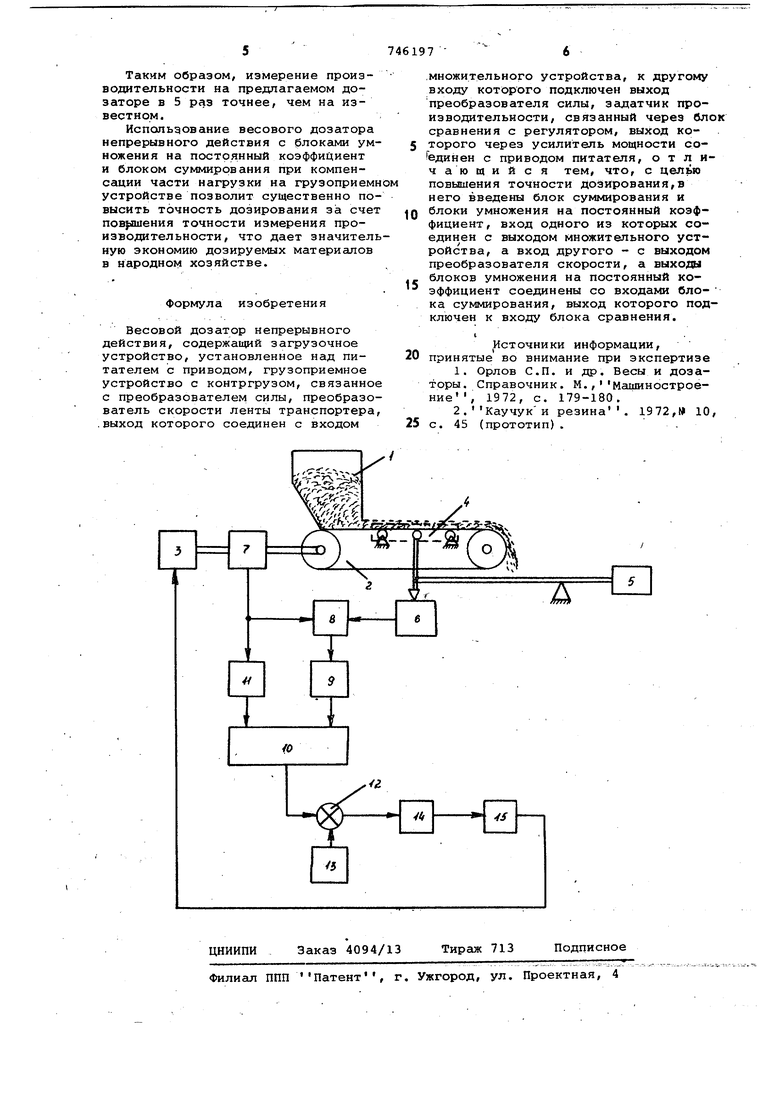
На чертеже изображена функциональная схема дозатора.
Дозатор имеет 3агрузочное устройство 1, установленное над питателем 2 с приводом 3, грузоприемное устройство 4 с контргрузом 5,
сВйэанное с прёобра:зователём 6 силы, преобразователь 7 скорости ленты транспортера, выход которого соединен с входом множительного устройства 8, другой вход которого подключен к выходу преобразователя б силы, а выход через блок рмножения 9 подключен к блоку 10 суммйрбванйя, вход которого соединен через , блок И умножения с выходом преобразователя 7 скорости. Выход блока 10 суммирования связан со входом блока 12 с с1вненйя,к другому входу которого подключен задатчик 13 производительности, а выход соединен со входом регулятора 14, выход которого через усилитель 15 мощности связан с приводом 3 питателя 2.
Дозатор работает следующим об11 азом.
Сыпучий материал из загрузочного устройства 1 питателем 2 с приводом 3 подается на грузоприемное устройство 4 с контргрузом 5, которым уравновёитвается как масса грузоприемного устройства 4, так и часть массы полезной нагрузки материала. Оставшаяся часть массы, являющаяся переменной.и зависящая от флуктуации потока материала на грузоприт емном устройстве 4, измеряется преобразователем 6, сигнал с которого поступает на вход множительного устройства 8, на другой вход которого подается сигнал от преобразователя 7 скорости. Сигйал с выхода множительного устройства 8, умноженный на блоке 9 умножения на постоянный коэффициент, пропорциональный той части массы, которую измеряет преобразователь 6 силы, поступает на первый вход блока 10 суммирования, на второй вход которого поступает сигнал с выхода преобразователя 7 скорости, умноженный на блоке 11
умножения на постоянный коэффициент,
пропорциональный скомпенсированной,., контргрузом 5 постоянной части нйгузки материала.
Образованный в результате слоения в блоке 10 суммирования сигнМл тёйущей производительности От равнивается в блоке 12 сравнения с сигналом задания Qj, вырабатываеким задатчиком 13 производительости. При наличии рассогласования тих сигналов с блока 12 сравнения а регулятор 14 поступает сигнал азбаланса
746197
в результате чего регулятор.14 вырабатывает управляющее воздействие, которое усиленное усилителем 15 мощности, поступает на привод 3 питателя 2, устраняя таким образом -вызванное отклонение производительности.
Предлагаемое устройство было испытано на лабораторном стенде при дозировании полиэтиленовой крсшки. При этом контргрузом было скомпенсирхЬвано 80% полезной нагрузки материала, проходящего по грузоприемному устройству, а оставшаяся ее часть измерялась преобразователем силы класса точности О,4.Проведенные испытания показали, что измерение производительности на предлагаемом дозаторе осуществляется с погрешностью не более 0,1%, что позволяет повысить точность дозирования до 0,5%, в то времякак при измерении производительности на известном дозаторе погрешность из1 ерения составляет не менее 0,5%, при этом точность -дозирования составляет +1,0%.
Полученные результаты поясняются тем, что при измерении производительности на известном дозаторе путем измерения всей массы, проходящей по грузоприемному устройству, и скорости ее тра нспортирования и перемножения этих величин получают
Q(cj,tcf)V
,v
,vtcrv cyv±o,oo4cyv i
или
Q - текущая производительность
где дозатора;
q - усилие, пропорциональное массе материала, измеренное Преобразователем силы;
(f
-погрешность преобразователя силы;
V
-скорость движения ленты транспортера.
В случае использования предлагдемого дозатора, т.е. при компенсации 80% полезной нагрузки контргрузом и измерении оставшейся части преобразователем силы класса точности 0,4 в соответствии с выбран-, ным алгоритмом вычисляют две составляющие производительности
q -A-v--o,, (г)
где А величина, пропорциональная уравновешенной массе материала (А О,8q); Q(etcJ)v(o,,0008cv)v , tJJ В - сигнал преобразователя силы
где пропорциональный оставшейся
части массы (в 0,2q); о - погрешность преобразователя ... силы (cf-0,ОО4-о/г).
Тогда производительность после блока суммирования равна
i.iJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Весовой дозатор непрерывного действия | 1981 |
|
SU979876A1 |
| Пневматический весовой дозатор непрерывного действия | 1979 |
|
SU792081A1 |
| Устройство для непрерывного весового дозирования сыпучих материалов | 1980 |
|
SU892225A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |
| Дозатор непрерывного действия | 1979 |
|
SU798739A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Дозатор непрерывного действия | 1979 |
|
SU826292A1 |
