Изобретение относится к устройствам управления в испытательной технике и может быть использовано при полигонных испытаниях самоходных машин.5
Известны устройства для программирования подачи команд при испытаниях, в которых тележка с устройством задания программы перемещается в жестких направляющих, а незначи-
тельные отклонения от заданной траектории компенсируются следящим положением рамки с блоком датчиков С17.
Для испытаний тракторов с системой вождения в виде направляющих параллельных тросов необходимым условием является свободное перемещение трактора в заданном коридоре движения, поэтому сравнительно жесткие направляющие движения неприменимы. Конст- 20 рукция отслеживания положения считывающих узлов Б виде роликов с ребордами и планки из-за значительных усилий и больших перемещений в поперечной и вертикальной плоскостях не- 25 целесообразна, так как имеет значительный вес, малую надежность в работе и недостаточную точность.
Наиболее близким к данному является устройство программного управления,30 например, полигонными испытаниями
машин, содержащее кодирующий механизм с программными элементами, связанными с опорой, щупы и контактный механизм считывания, связанный с цепями управ- 35 ления приводом машины t2.
Однако кодирующий механизм устройства - жесткий копир - при значительной скорости перемещения трактора
ввиду значительных ударных воздей- 40 ствий на механизм считывания и малого времени воздействия ненадежен. Контактный механизм считывания в известном устройстве также ненадежен.
Цель изобретения - повышение на- 45 дежности устройства.
Поставленная цель достцгается тем, что в устройстве программного управения, например, полигонньгми испытаниями машин, содержащем кодирующий механизм с программными элементами, связанными с опорой, щупы и контактный механизм считывания, связанный с цепями управления приводом машины, программные элементы кодирующего, меанизма установлены на опоре с поощью фиксаторов и ограничителей кругового смещения и снабжены щупами.
выполненными в виде прутов с пружинными свойствами, а контактный механизм считывания снабжен подпружиненньми клавишами, сопряженными с контактами.
В месте размещения кодирующего механизма установлены продольные брусья и въездные направляющие для ограничения траектории движения машины.
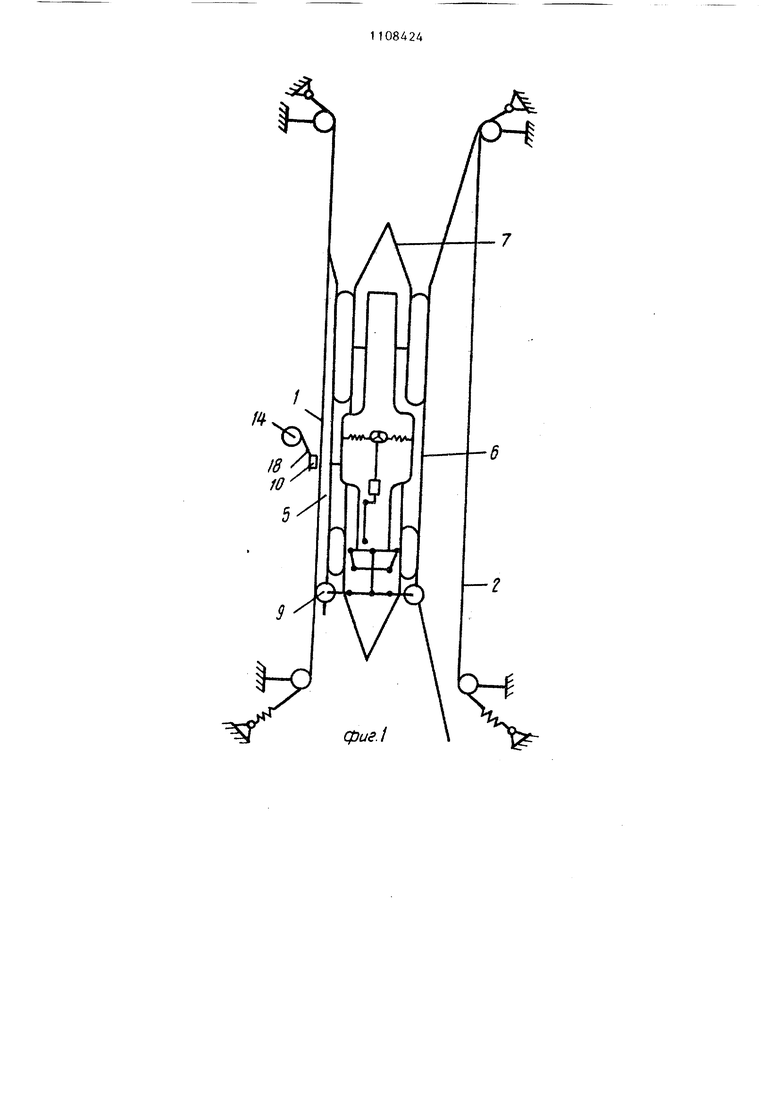
На фиг. 1 изображено размещение трактора и устройство программного управления на испытательном полигоне на фиг. 2 - схема устройства программного управления.
Полигон со сложной траекторией движения тракторов как правило представляет собой трек, ограниченный тросами системы автовождени 1 и 2, с узлами 3 для ограничения траектории движения машины против смещения трактора в поперечном направлении и с кодирующим механизмом 4 с программными элементами. Узлы для ограничения траектории движения машины располагаются на поверхности трека внутри тросов автовождения и состоят из продольньос брусьев 5 и 6 и внутренних ограничительных брусьев с въездными направляющими. Меяоду ограничительными брусьями 5 и 6 и направляющими 7 проходят передние и задние колеса трактора 8. На тракторе 8 установлены цепи управления приводом с роликами 9 и контактный механизм считывания 10 с подпружиненными клавишами 11 , который закреплен на кронштейнах. Клавиши 11 крепятся на клавишной колодке механизма 10 на штоках с ограничителями кругового смещения 12 и пружинах 13 (фиг.2). На клавишной колодке и клавишах располагаются подвижные я неподвижные части контактов 14 контактного механизма считывания 10. Кодирующий механизм 4 Представляет собой опору 15 с вырезами под шарики фиксаторов 16, размещенных внутри программных элементов 17с помощью пружин 18. На программном элементе 17 закреплен щуп 19, вполненный в виде прута с пружинными свойствами. Элемент 17 имеет ограничитель кругового смещения относительно опоры 15, выполненный, например, в виде ограничительных ребер па вырезах 20. Контакты устанопланы в цепях управления приводом трактора.
Работа устройства осуществляется следующим образом.
После установки трактора на трек между тросами автовождения 1 и 2 в нужном направлении на всех кодирующих механизмах, установленных на треке , программные элементы 17 перемещают в положение, соответствующее включению заданного сигнала в цепи управления, в котором фиксируются с помощью фиксаторов 16 и ограничителей 20. На одной опоре может располагаться один и более элементов. Например, один элемент передает сигнал выключения муфты сцепления, коробки передач, рейки топливного насоса, включения тормозов с последующим включением последующей передачи. Второй программный элемент может передат сигнал включения вала отбора мощности и т.п. Типы цепей управления и комбинации установки программных элементов зависят от типа испытуемых мащин и методики их испытания. Запуск трактора на испытания осуществляется автоматическим или механическим включением контактов любой из клавиш 11, при котором срабатьшают те или иные цепи управления приводом трактора.
При изменении траектории движения или при смещении под действием возмущения от препятствий возвращение трактора к средней линии коридора, образованного тросами 1 и 2, происходит от управляющего сигнала, получаемого системой автоуправления при кратковременном соприкосновении роликов 9 с тросами 1 и 2.
При подходе к кодирующему механизму 4 функции автовождения трактора принимают на себя узел ограничения; трактор вводится .в колею, расположрнную на определенном расстоянии от кодирующего механизма . При прохождении трактора мимо механизма 4 прут 19 сгибается, нажимает на клавищу 11 и скользит по ней, обеспечивая удержание контактов во включенном состоянии на время, необходимое для срабатывания соответствующей цепи управления.
Конструкция устройства проста и надежна в агрессивных условиях, при высокой температуре и вибрациях, обеспечивает локальный принцип управления на полигонах со сложной траекторией движения.
4i
1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения трактора по замкнутой траектории | 1983 |
|
SU1134126A1 |
| Загрузочное устройство для испытания тракторов на полигоне | 1980 |
|
SU1081456A1 |
| Устройство для автоматического вождения трактора по программной траектории движения | 1980 |
|
SU869597A1 |
| Копирующее устройство для автоматического направления движения сельскохозяйственного агрегата | 1982 |
|
SU1042639A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Система автоматического вождения тракторов при испытаниях на кольцевом треке | 1988 |
|
SU1630626A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ, НАПРтЕР, ПОЛИГОННЫМИ ИСПЫТАНИЯМИ МАШИН, содержащее кодирующий механизм с программными элементами, связанными с опорой, щупы ; и контактный механизм считывания, связанный с цепями управления приводом машины, отличающеес я тем, что, с целью повышения надежности, программные элементы кодирующего механизма установлены на опоре с помощью фиксаторов и ограничителей кругового смещения и снабжены щупами, выполненными в виде прутов с пружинными свойствами, а контактный механизм считывания снабжен подпружиненными клавищами, сопряжет ными с контактами. 2. Устройство по п. 2, отличающееся тем, что в месте i размещения кодирующего ::еханизма установлены продольные брусья и (Л С въездные направляющие для ограничения траектории движения машины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Программное устройство для автоматизированной поточной линии | 1973 |
|
SU477395A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрическое устройство для управления механизмами по заранее заданной программе | 1947 |
|
SU76833A1 |
