1
Изобретение относится к системам управления судовыми двигателями.
Известны системы управления судовым двигателем со статическим регулятором частоты вращения, содержащие задающий орган, регулирующее устройство, соединенное с задающим органом, датчиком частоты вращеиия и сумматором, подсоединенным в линию от задающего органа к исполнительному устройству, связанному с регулятором частоты вращения, датчиками иараметров механической и тенловой пагрузки двигателя, соединенными с блоком выбора больп1его, и блок нелипейиостей 1.
Известные системы обеспечивают защиту двигателя от перегрузки, но только по одному параметру и не обеспечивают высокой точности управления частотой вращения двигателя.
У двигателя, спабженного статическим регулятором, при одном и том же задаииц частота врапдения будет разной в зависимости от нагрузки двигатели, зависяи1,ей от условий плавания судна.
Цель изобретения - одновремепное повышение точности управления двигателем, обесиечепие его автоматической защиты от перегрузки и иовьшение наде}кпости от увеличения числа параметров контроля.
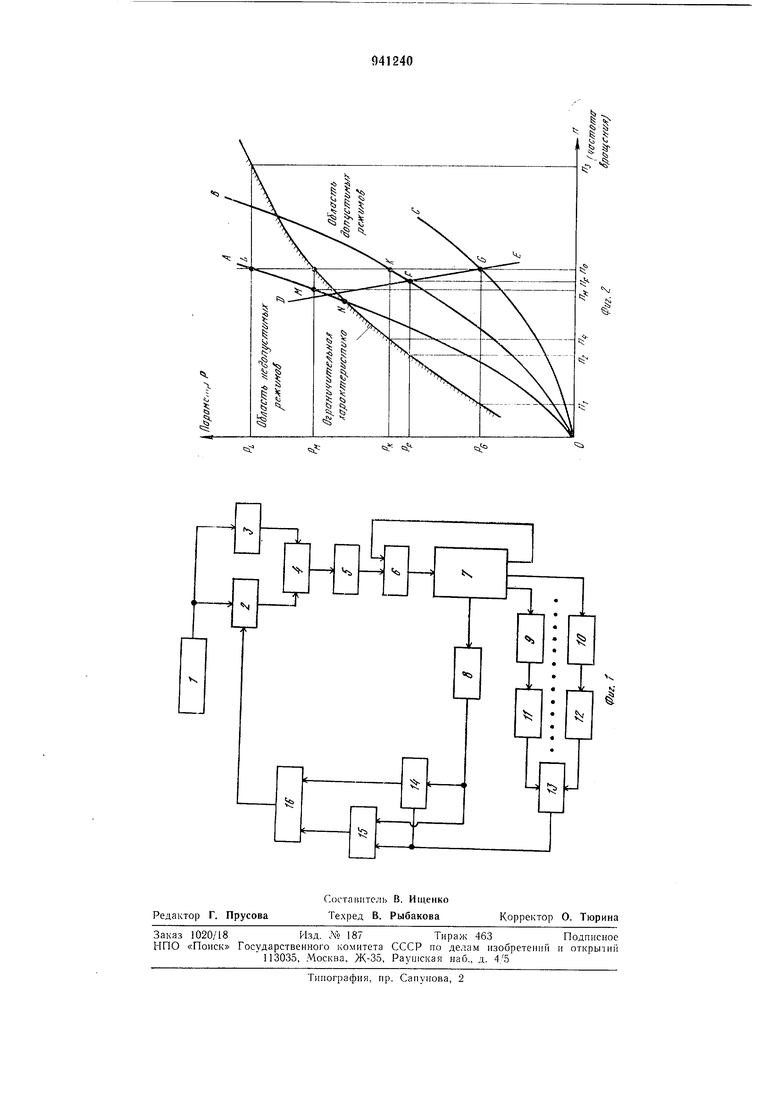
Для достижения поставленной пели система снабжена дополнительными блокамн нелинейностей, установленными между датчиками параметров и блоком выбора большего, дополнительным сумматором, дополнительными блоком выбора большего и интегратором, соедииепными входами с блоком выбора большего и датчиком частоты вращения, а выходами - с допол10 пительиым сумматором, соединенным с регулирующим устройством. На фиг. 1 представлена блок-с.ема системы; на фиг. 2 - варнанты вннтовых характеристик А, В, С, регуляторная характеристика DE в координатах «параметр контроля Р - частота вращения л.
Система содерлчит задающий орган 1, соедииенный с регулирующим устройством 2 и через блок 3 пелинейностей и сумматор
20 4 - с исполиительным устройством 5, связанным со статическим регулятором 6 частоты вращеиия двигателя 7. С двигателем 7 соединены датчик 8 частоты вращения и датчики 9 и 10 иараметров механической
25 И тепловой нагрузки двигателя, например температуры отработавших газов, давления па рамовые подщппники и т. п. Датчики 9 н 10 соединены через донолнительные блоки И и 12 нелинейностей с блоком 13 вы30 бора большего, выход которого соедииен с
3
до110Л1111Тслы)1)1М блоком 14 выбора большего и интегратором 15, другие входы которых соединены с датчиком 8 частоты вран 1,ения, а выходы - с дополнительным сумматором 16, соединенным с регулируюп),им устройством 2.
Система работает следующим образом.
Каиал от задатчика 1 (см. фиг. 1) через блок 3 пелинейностей и сумматор 4 является каналом следящего типа, т. е, если не изменяется задание на выходе задатчика 1, то остается иеизмеииым и задаиие исиолнительному устройству 5. Так осуществляется управление если сигиал на выходе регулирующего уетройства 2 равен О, что имеет место нри отключении регулирующего устройства 2, например вследствие его неисправности. При изменении сигнала на входе сумматора 4 при неизменном полол ении задающего органа 1 будет меняться задание иеиолиительного устройства 5 и, следовательно, изменяться режим работы двигателя 7.
Таким образом, сумматор 4 служит для введения в канал управления от задающего органа 1 к исполнительному устройству 5 корректирующего воздействия от регулируюн;его устройства 2, вырабатываемого последним для устранения перегрузки или влияния статизма регулятора 6.
Задающий орган 1 выполняет две функции: задает уставку частоты вращения двигателя 7 регулирующему устройству 2; задает через блок 3 нелинейностей и сумматор 4 положение исполнительного устройства 5 и тем самым некоторую частоту вращення двигателя 7.
В общем случае заданная чаетота вращения и фактическая частота вращения, получающаяся для положения исполиительного устройства 5, соответствующего этому заданию, будут различными. Корректировка сигнала регулирующего устройства 2 достигается с помощью блока 3 иелииейиостей.
Дополиителы-ше блоки 11 и 12 иелииейиостей настраиваются так, что для каждого значения входного сигнала от датчиков 9 и 10 параметров нагрузки выходной сигнал блока равен величиие сигнала датчика 8 частоты вращения в точке ограничительной характеристики (фиг. 2) ио данному параметру, в которой нагрузка двигателя равна измеренной датчиком 9.
Если двигатель работает в области допустимых режимов по любому из контролируемых параметров, то ири даниом значении нагрузки сигиал фактической частоты вращения двигателя от датчика 8 будет больще, чем сигнал, выработанщлй из дополнительных блоков 1 н 12 нелинейностей. Если же по какому-то из параметров двигатель окажется перегруженным, то сигнал, выработанный дополнительным блоком II нелииейностей, соединенным с датчиком 9 этого параметра, будет больще, чем сигнал фактической частоты вращения. Дополнительный блок 13 выбора большего осуществляет выбор наибольщего из сигналов блоков И н 12, характеризующих минимально допустимую для данной нагрузки частоту врап|,ення двигателя.
Пусть задатчик 1 задает частоту HQ, двигатель 7 работает в точке G, а статический регулятор 6 образует регуляторную характеристику DE. В точке G значение контролируемого параметра Р равно PG, и ему соответствует допустимая частота врапдеПИЯ til, которая меньше, чем фактическая, измеренная датчиком 8 частоты вращения, который считается независимым.
Дополнительный блок 14 выбора большего осуществляет сравнение сигнала фактической частоты вращения Яо от датчика 8 с наибольщим сигналом миии.мально допусти.мой частоты вращения, а так как двигатель работает в области донустимых режимов (не нерегружен), то сигнал фактической частоты вращения Ло свободно нроходит через блок 14 к донолнительиому сумматору 16. Сигнал от интегратора 15 будет равен О, так как он интегрирует только положительное значе1Н1е разности сигналов блока 13 н датчика 8. Следовательно, на выходе сум.матора 16 сипгал будет равен сигналу от датчика 8 и соответственно регулирующее устройство 2, реализующее, наирнмер, ироиорциональио-интегральиый закон регулирования, вырабатывая корректируюн;ий сигнал в сумматор 4, обеспечит точное равенство сигиала от датчика 8 сигналу от задатчика 1, т. е. фактическая частота враидения двигателя
7 будет точио равиа заданной «оДоиуетим, в силу каких-то причин, например уеиления ветра, винтовая характеристика примет вид В. Если бы не было регулируюигего устройства 2, то двигатель
Бьииел бы в точк} F, и его частота враи еиия стала бы равна /г/.-, которая меньше «0. Зиачеи1ге параметра Р в этой точке равно , а соответетвующая ограничительной характеристике предельно
л.опустимая частота вращения равиа П2. Поскольку она меньше «о, то ироцесс будет протекать аналогично вышеописанному, и регулируюшее устройство 2 выведет двигатель в точку К, со зиачением параметра РК
и предельно допустимой частоты враи1,еиия «4. Таким образом, регулирующее устройство 2 независимо от условий плавания и вида регуляторпой характеристики DE обеспечит точное равенство фактической
частоты вращеиия двигателя заданной.
Пусть теперь в силу некоторых нричин, например уменьшения глубины, винтовая характеристика принимает вид А. Если бы регулирующее устройство 2 было непосредетвенно соединено с датчиком 8, то он вывел бы двигатель в точку L, за ограничительную характеристику, что недопустимо. В точке L параметр Р равен PL, а соответствующая предельно допустимая частота вращения двигателя % больше, чем фактическая По (не рассматривая пока работу интегратора 15), поэтому через блок 14 станет проходить сигнал от блоков И и 12, равный Лз, и больший сигнала датчика 8, т. е. на входе регулирующего устройства 2 сигнал переменной станет больше сигнала задания. Регулирующее устройство 2 станет вырабатывать корректирующее воздействие для уменьшения сигнала переменной, что приведет к уменьшению частоты вращения двигателя.
Это уменьщение благодаря блоку 14 будет происходить до тех пор, пока двигатель не выйдет в точку М. В этой точке сигнал на выходе блоков 11 и 12 станет равным сигналу По от задатчика 1, и регулирующее устройство 2 прекратит (если не учитывать интегратор 15) корректировать режим двигателя. Но точка М лежит выше ограничительной характеристики, следовательно, работа в ней недопустима. Точный вывод двигателя на ограничительную характеристику осуществляет интегратор 15. В точке М сигнал на выходе блоков 11 и 12 равен По, а фактическая частота двигателя меньше и равна Пм, т. е. знак их разности соответствует работе интегратора 15. Интегратор 15 вырабатывает сигнал на выходе блока 13 над сигналом фактической частоты вращения от датчика 8. На выходе интегратора 15 сигнал начнет увеличиваться и соответственно увеличиваться сигнал за сумматором 16, так что снова сигнал переменной частоты на выходе регулирующего устройства 2 станет больше сигнала от задатчика 1, равного Пд. Регулирующее устройство 2 станет уменьшать режим работы двигателя. Это уменьшение будет происходить до тех пор, пока интегратор 15 не прекратит увеличивать свой выходной сигнал, т. е. пока сигнал от блоков 11 и 12 не станет равным сигналу от датчика 8. Указанное равенство сигналов может иметь место только нри работе двигателя в точке Л, точно на ограничительной характеристике.
Выбор параметра, по которому осуществляется ограничение режима, осуществляется блоком 13.
Система реализовать вывод двигателя на ограничительную характер 1стику для любого из нескольких разнородных иараметров.
Это достигается благодаря тому, что блоки нелинейностей 11 н 12, формирующие такие зависимости, встроены не в линни связи от датчика частоты вращения, а в выходные каналы датчнков 9 н 10 параметров нагрузки, и их выходные сигналы приводятся (масштабируются) к значениям одного параметра - частоты вращения. Таким образом, блоки 11 и 12 нелинейностей, интегратор 15 и донолнительный блок 14 выбора большего необходимы для исключения выхода двигателя из области допустимых .мов работы и решают одну и ту же задачу - обеспечивают точное
управление двигателем со статическим регулятором 6 в допустимой области режимов и не допускают выхода двигателя из этой области (в статике) во всех условиях плавания.
Система может быть реализована на пневмоэлементах или на элементах других типов, например электронных, или комбииациях элементов разных типов.
Формула изобретения
Система управления судовым двигателем со статическим регулятором частоты вращеиия, содержащая задающий орган, регулирующее устройство, соеднненное с задающим opraHOjM, датчиком частоты вран ения и сумматором, подсоеднненным в линию от задающего органа к исполнительному устройству, связанному с регулятором частоты вращення, датчнкамн параметров механической и теиловой иагрузки двигателя, соединенными с блоком выбора большего, н блок нелннейностей, отличающаяся те.м, что, с целью одновременного повышения точностн управления двигателем, обеспечения его автоматической защиты от перегрузки и повышения иадежностп при увеличении числа параметров контроля, она снабжена дополнительным блоком нелннейностей, установленным между датчнками параметров и блоком выбора большего, дополнительным сумматором, дополн 1тельным блоком выбора большего и интегратором, соединенными
входами с блоком выбора большего н датчиком частоты вращения, а выходами - с дополнительным сумматором, соединенным с регулирующим устройством.
Источники ннформацин,
нрпнятые во внимание при экснертнзе
1. Авторское свидетельство СССР № 379452, кл. В 63 Н 21/22, 1973 (прототип).
ta,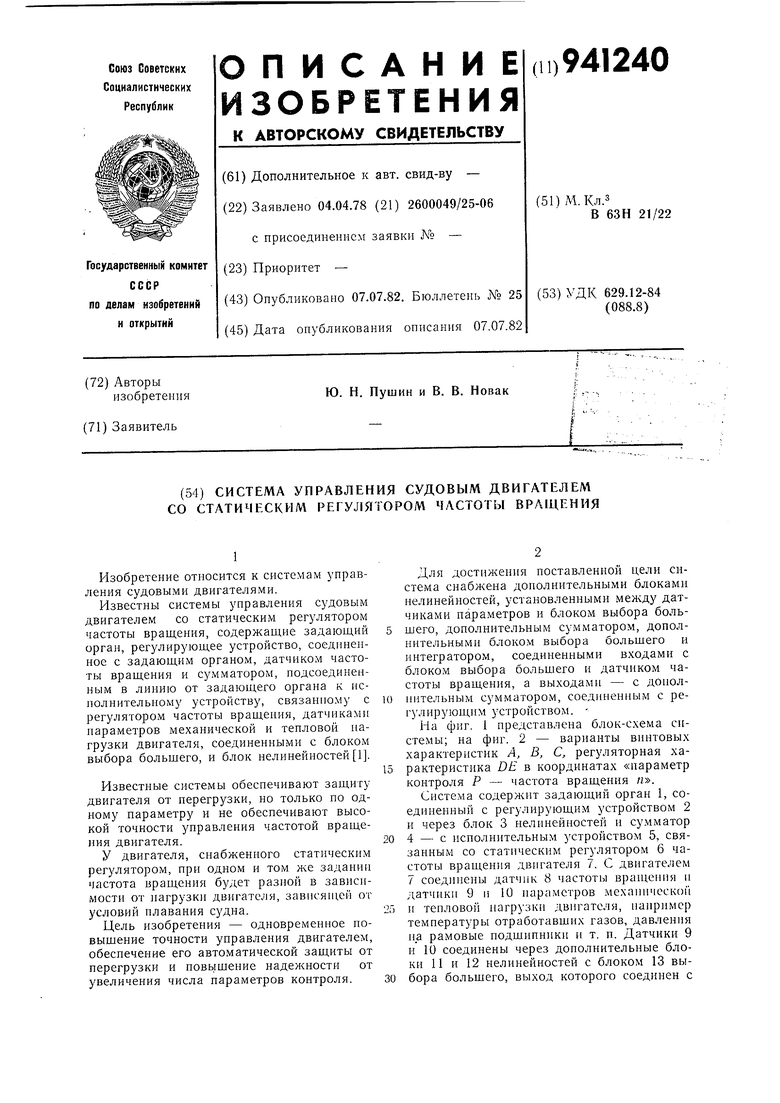
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Система управления непрерывной разливкой жидкого металла | 1974 |
|
SU607643A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2008 |
|
RU2389892C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТИВНЫХ ГИДРАВЛИЧЕСКИХ ТУРБИН | 2017 |
|
RU2636603C1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления | 1983 |
|
SU1174579A1 |
| Позиционный регулятор | 1975 |
|
SU534755A1 |