(54) ПОЗИЦИОННЫЙ РЕГУЛЯТОР
относительных единицах ) характеризует общую неравномерность регулиро(fv.,
/ «.
), а величина
вания I ff s f Ч
S rf м
ли дне
WAkC
изменения perynapveMoro параметра { Д Ч ) При малых изменениях нагрузки ( Д М ) относительно какого-либо установившегося режима () характеризует местную неравномерность регулирования ( vv ) на данном режиме. Последняя пропорциональна отношению rfM - / м м и, по существу, определяет запас устойчивости регулятора на данном установившемся режиме (нагрузке) (чем больше , тем устойчивее работает регулятор).
Цэлью изобретения является повышение точности и стабильности работы регулятора.
Эта цель достигается путем того, что в регулятор введено зубчатое соединение, Bbfполненное-в виде рейки, связанной с блоком управления, и сектора, установленного на оси и связанного с входом датчика обратной связи,
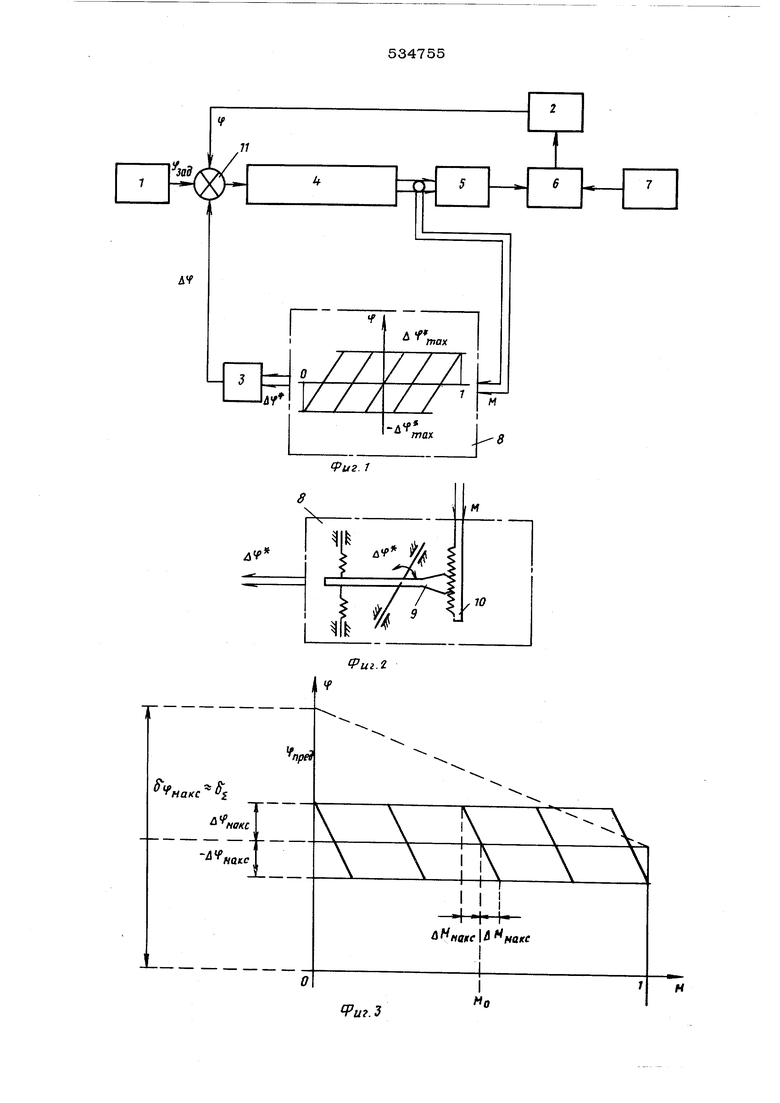
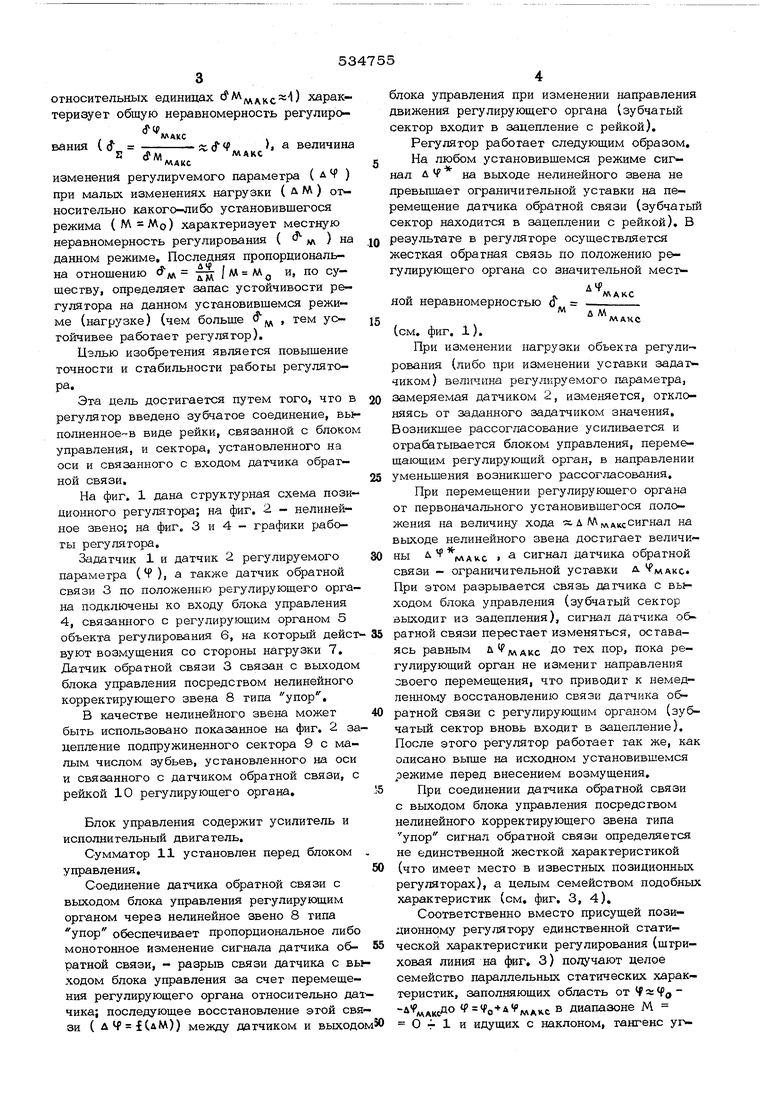
На фиг. 1 дана структурная схема позиционного регулятора; на фиг. 2 - нелинейное звено; на фиг. 3 и 4 - графики работы регулятора.
Задатчик 1 и датчик 2 регулируемого параметра (), а также датчик обратной связи 3 по положению регулирующего органа подключены ко входу блока управления 4, связанного с регулирующим органом 5 объекта регулирования 6, на который деист вуют возмущения со стороны нагрузки 7. Датчик обратной связи 3 связан с вьисодом блока управления посредством нелинейного корректирующего звена 8 типа упор,
В качестве нелинейного звена может быть использовано показанное на фиг. 2 зацепление подпружиненного сектора 9 с малым числом зубьев, установленного на оси и связанного с датчиком обратной связи, с рейкой 10 регулирующего органа,
Блок управления содержит усилитель и исполнительный двигатель.
Сумматор 11 установлен перед блоком управления.
Соединение датчика обратной связи с выходом блока управления регулирующим органом через нелинейное звено 8 типа упор обеспечивает пропорциональное либо монотонное изменение сигнала датчика обратной связи, - разрыв связи датчика с вь ходом блока управления за счет перемещения регулирующего органа относительно датчика; последующее восстановление этой связи (дЧ )) между датчиком и выходо
блока управления при изменении направления движения регулирующего органа (зубчатый сектор входит в зацепление с рейкой).
Регулятор работает следующим образом.
На любом установивщемся режиме сигнал Д Ч на выходе нелинейного звена не превьшиет ограничительной уставки на перемещение датчика обратной связи (зубчаты сектор находится в зацеплении с рейкой). В результате в регуляторе осуществляется жесткая обратная связь по положению рогулирующего органа со значительной местдЧ
ной неравномерностью (Г
U м
МАКС
(см. фиг. 1).
При изменении нагрузки объекта регулирования (либо при изменении уставки задатчиком) величина регулируемого параметра, замеряемая датчиком 2, изменяется, отклоняясь от заданного задатчиком значения. Возникшее рассогласование усиливается и отрабатывается блоком управления, перемещающим регулирующий орган, в направлении уменьшения возникшего рассогласования.
При перемещении регулирующего органа от первоначального установившегося положения на величину хода х д ЛЛ д сигнал на выходе нелинейного звена достигает величины Д (vAAv.c сигнал датчика обратной связи - ограничительной уставки Д .кс, При этом разрывается связь датчика с вьгходом блока управления (зубчатый сектор выходит из зацепления), сигнал датчика обратной связи перестает изменяться, оставаясь равным ь ллАкс тех пор, пока регулирующий орган не изменит направления своего перемещения, что приводит к немедленному восстановлению связи датчика обратной связи с регулирующим органом (зубчатый сектор вновь входит в зацепление). После этого регулятор работает так же, как описано выше на исходном установившемся режиме перед внесением возмущения.
При соединении датчика обратной связи с выходом блока управления посредством нелинейного корректирующего звена типа упор сигнал обратной связи определяется не единственной жесткой характеристикой (что имеет место в известных позиционных регуляторах), а целым семейством подобных характеристик (см, фиг. 3, 4).
Соответственно вместо присущей позиционному регулятору единственной статической характеристики регулирования (штриховая линия на фиг, 3) получают целое семейство параллельных статических характеристик, заполняющих область Ч Чо+АЧ д с в диапазоне М О - 1 и идущих с наклоном, тангенс угла которого характеризуется величиной местной неравномерности регулирования ,$- л- „4 МАК.С Эти характеристики изображены на фиг, 3 сплошными линиями. Переход с одной характеристики на другую осуществ-ляется автоматически за счет смещения регулирующего органа относитель но датчика при достижении сигналом датчика ограничительной уставки (+. АЛАКС). Для этого достаточно, чтобы регулирующий орган переместился относительно своего исходного установившегося положения на величину д ЛЛ , составляющую некоторую долю от его полного перемещения. Это позволяет значительно (в п« д w....раз) увеличить местную неравномерность регулирования по сравнению с местной неравномерностью в известных позиционных регуляторах, где тот же сигнал АЧддд1 с соответст вует перемещению регулирующего органа на его полный ход (д М « 1), Если учесть что величина Д М ц..а может составлять всего 0,2 - О, 3 от полного перемещения регулирующего органа, то легко видеть, чт величина местной неравномерности в предлагаемом регуляторе может быть получена в 3-5 раз выше, чем в известных позиционных регуляторах (см, фиг. 3), Из изложенного следует также, что отклонение регулируемого параметра от заданного значения на установившемся режиме при любой нагрузке объекта регулирования не может превысить величину , Нетрудно видеть, что в известных позиционных регуляторах при той же величине местной неравномерности б д, , что и в предлагаемом регуляторе, при изменении нагрузки на полную величину отклонение регулируемого параметра превысило бы ана логичное отклонение в предлагаемом регуляторе 3 .ё (т.е. в 3-5 раз при М 5:. о,2 - 0,3 от величины полного хода регулирующего органа). Таким образом, предлагаемый регулятор существенно повышает запас устойчивости контура регулирования, т.е. улучшает его динамические качества без увеличения или даже при уменьшении общей неравномерности регулирования, и уменьшает величину отклонения регулируемого параметра при глубоких изменениях нагрузки объекта регулирования, что подтверждено при испытании регулятора совместно с электронной моделью объекта регулирования, набранной на аналоговой моделирующей машине. Формула зобре тения 1. Позиционнъш регулятор, содержащий последовательно соединенные задатчик,сумматор, блок управления и датчик обратной связи, выход которого подсоединен ко входу сумматора, отличающийс я тем, что, с целью повышения точности и стабильности работы регулятора, в него введено зубчатое соединение, выполненное в виде рейки, связанной с блоком управления, и сектора, установленного на оси и связанного со входом датчика обратной связи. Источники информации, принятые во внимание при экспертизе: 1.Статья В, Е„ Соловей и др, Всережимные системы автоматического регулирования числа оборотов судовых паровых турбин в сборнике Машиностроение и металлургия Кировского зaвoдa j Машиностроение, 1970 г., стр, 165-173, 2,Авторское свидетельство № 270748, кл, G 05 В 11/00, от 06,08.70 г. (прототип).
§,,)( л/с AT
US,SM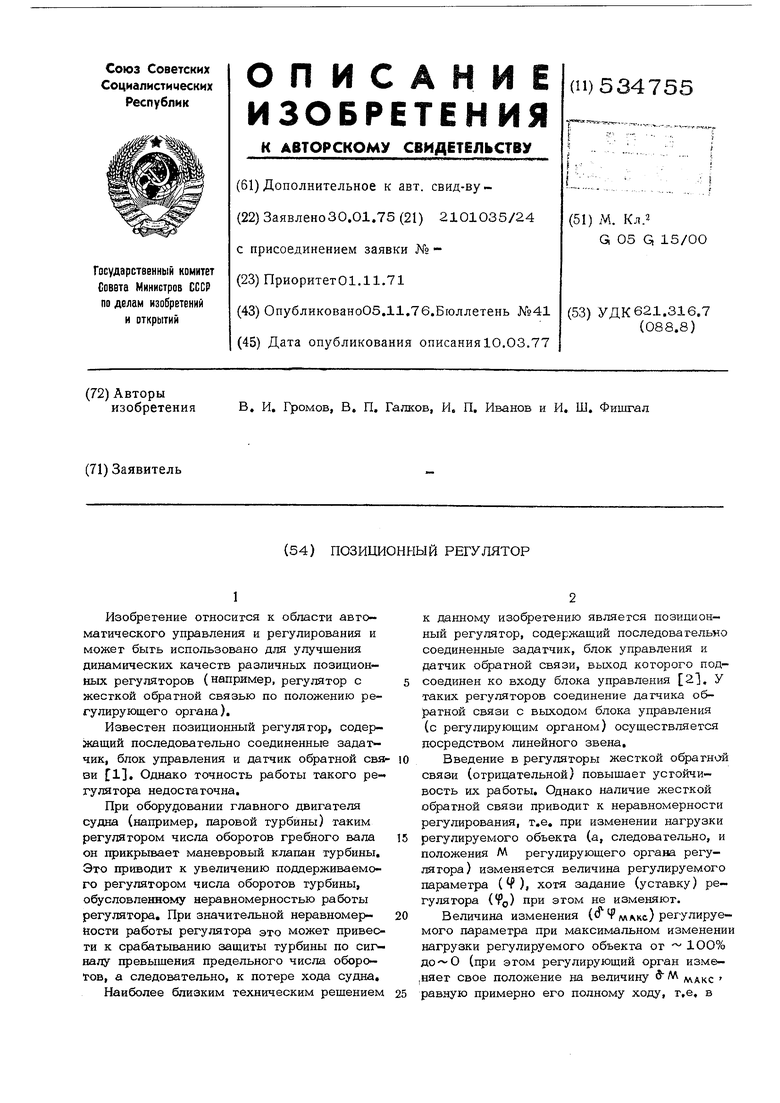

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Регулятор давления | 1986 |
|
SU1354169A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2290329C1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЩЕКОВОЙДРОБИЛКИ | 1972 |
|
SU335001A1 |
| Регулируемый преобразователь переменного напряжения в переменное | 1982 |
|
SU1128350A1 |
| Позиционный электропривод | 1984 |
|
SU1228210A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |