(54) РАБОЧАЯ ГОЛОВКА К ПОЛУАВТОМАТУ ДЛЯ СБОРКИ ПОДШИПНИКОВ КАЧЕНИЯ
1
Изобретение относится к машиностроению, в частности к сборке подшипников.
Известна рабочая головка к полуавтомату для сборки подшипников, содержащая смонтированное на основании, соосно расположенные внутренний и наружный кор- 5 пуса, каналы для роликов, размещенный во внутреннем корпусе цилиндрический корпус с радиально расположенными каналами для роликов, отсекатель, приводную цилиндрическую оправку с направляющей ,Q втулкой 1.
Однако известн.ая головка не обеспечивает сборки упорных роликовых и шариковых подшипников.
Цель изобретения - обеспечение возможности сборки подщипников качения. 15
Поставленная цель достигается тем, что рабочая головка к полуавтомату для сборки подшипников качения, содержащая смонтированные на основании, соосно расположенные внутренний и наружный корпуса, 20 каналы для роликов, размещенный во внутреннем корпусе цилиндрический корпус с радиально расположенными каналами для роликов, отсекатель, приводную цилиндрическую оправку с направляющей втулкой, снабжена подпружиненным ориентатором окон сепараторов подшипников, установленным с возможностью перемещения между цилиндрической оправкой и направляющей втулкой, обраш,енные одна к другой, поверхности соосно установленных внутреннего и наружного корпусов выполнены сферическими, каналы для роликов равномерно меридиально размещены на сферической поверхности внутреннего корпуса, а каналы цилиндрического корпуса размещены в горизонтальной плоскости параллельно основанию, при этом отсекатель выполнен в виде втулки с торцовыми выступами.
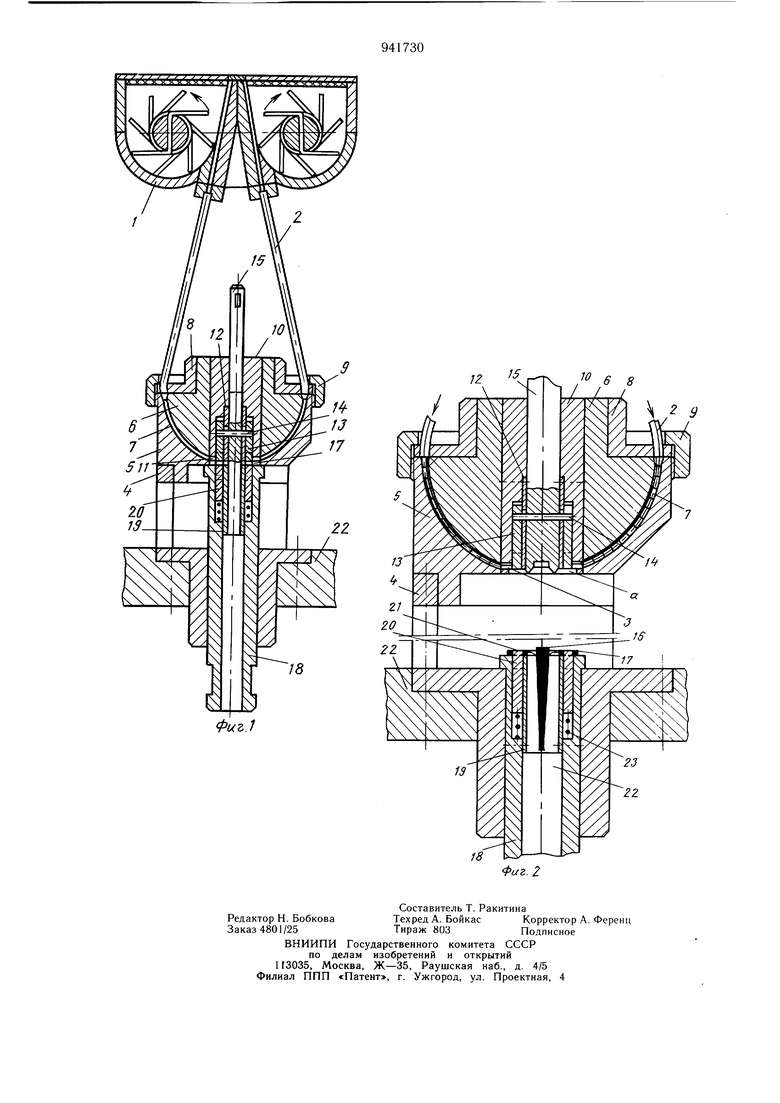
На фиг. 1 изображена часть полуавтомата с рабочей головкой для сборки подшипников качения; на фиг. 2 - рабочая головка.
Полуавтомат для сборки роликовых и шариковых подшипников содержит бункерное загрузочное устройство 1 для иглороликов, иглороликопроводы 2, по которым под действием силы тяжести вводятся комплекты роликов 3 в рабочую головку 4, состоящую из соосно установленных наружкого корпуса 5 и внутреннего корпуса 6, у которых обрапденные одна к другой поверхности выполнены сферическими. Каналы 7 для роликов равномерно и меридионально размепдены на сферической поверхности внутреннего корпуса 6. Корпуса 5 и 6 соединены между собой цилиндрической шайбой 8 и накидной гайкой 9. В осевом отверстии корпуса 6 смонтирован цилиндрический корпус 10 с радиальными каналами 11, размещенными в горизонтальной плоскости, которые состыкованы с каналами 7 корпуса 6. В осевом ступенчатом отверстии цилиндрического корпуса размещена направляющая втулка 12 с продольными пазами для отсекателя 13 роликов 3, выполненного в виде втулки с торцовыми выступами, выполняющих функцию толкателей. Отсекатель 13 соединен посредством штифта 14 со штампом 15, который предназначен для удаления прибылей 16 с заготовок литых капроновых сепараторов 17 при сборке подшипников.
Приводная цилиндрическая оправка 18 для подъема сепаратора 17 в зону сборки а имеет направляющую втулку 19 с продольными пазами. Подпружиненный ориентатор 20 окон 21 сепаратора, выполненный в виде втулки с кулачками, установлен с возможностью перемещения между цилиндрической оправкой 18 и направляющей втулкой 19. Рабочая головка 4 установлена на основании 22 сборочного полуавтомата.
Работа рабочей головки в полуавтомате для сборки упорных роликовых и шариковых для сборки упорных роликов и щариковых подшипников осуществляется следующим образом.
Сепаратор 17 собираемого подшипника устанавливается на подвижную оправку 18 и ориентируется окнами на кулачках ориентатора 20, а затем пневмоцилиндром (не показан) поднимается в зону сборки а. В зону сборки а штампом 15 удаляется прибыль 16 с заготовки литого капронового сепаратора 17, которая через сквозное отверн стие 23 удаляется. Затем отсекатель 13 пневмоцилиндром (не показан) приподнимается вверх. Комплект роликов 3 расположенный в радиальных каналах 11, под
действием веса роликов, вышерасположенных в каналах 7, проталкивается на кулачки ориентатора 20 и фиксируется пазами направляющей втулки 12. Потом отсекатель 13 пневмоцилиндром опускается вниз и своими торцовыми выступами вталкивает комплект роликов в окна 21 сепаратора 17. Подпружиненный ориентатор 20 под действием комплекта роликов 3 втапливается в подвижной оправке 18. Пневмоцилиндром собранный подшипник опускается вниз и снимается.
Изобретение позволяет производить сборку упорных роликовых и шариковых подшипников,
Формула изобретения
Рабочая головка к полуавтомату для сборки подшипников качения, содержашая смонтированные на основании, соосно расположенные внутренний и наружный корпуса, каналы для роликов, размещенный во внутреннем корпусе цилиндрический корлус с радиально расположенными каналами для роликов, отсекатель, приводную цилиндрическую оправку с направляющей втулкой, отличающаяся тем, что, с целью обеспечения возможности сборки упорных роликовых и шариковых подщипников, она снабжена подпружиненным ориентатором окон сепараторов нодщипников, установленным с возможностью перемещения между цилиндрической оправкой и направляющей втулкой, обращенные одна к другой, поверхности внутреннего и наружного корпусов выполнены сферическими, каналы для роликов равномерно меридионально размещены на сферической поверхности внутреннего корпуса, а каналы цилиндрического корпуса размещены в горизонтальной плоскости параллельно основанию, при этом отсекатель выполнен в виде втулки с торцовыми выступами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 721588, кл. F 16 С 43/04, 19.10.77 (прототип) .
