1
Изобретение относится к автомобильному транспорту, в частности к автоматическому рулевому управлению транспортного средства.
Известно автоматическое рулевое управление транспортного средства, содержащее исполнительный механизм, кинематически связанный с управляемыми колесами, шарнирно закрепленными на раме транспортного средства, рычаг, жестко закрепленный на кинематической связи со стороны, противоположной установке исполнительного механизма относительно шарнира крепления управляемых колес, датчик в корпусе и щуп, установленные на рычаге и связанные друг с другом посредством управляодего устройства, обеспечивающего передачу сигнала датчика к исполнительному механизму, противоположного по знаку направлению перемещения исполнительного механизма Cll.
Недостаток данного рулевого управления состоит в том, что контактный
щуп должен соприкасаться с направляющей линией перед передними колесами, если смотреть в направлении |вижения, чтобы получить от датчика логически правильный сигнал. Если бы, например, контактный щуп был расположен так, чтобы он контактировал с направляющей линией точно посредине колеса, то сигнал на датяике не eoa-t никал бы. Знак сигнала стал бы даже
10 обратным, если бы контактный щуп прилегал к направляющей линии только позади колеса. 8 этом случае,например, при правом повороте, когда транспортное средство движется к
15 направляющей линии, т.е. когда расстояние до направляющей линии уменьшается, контактным щупом измерялось бы мнимое увеличение. С целью прааильного регулирования соединенный
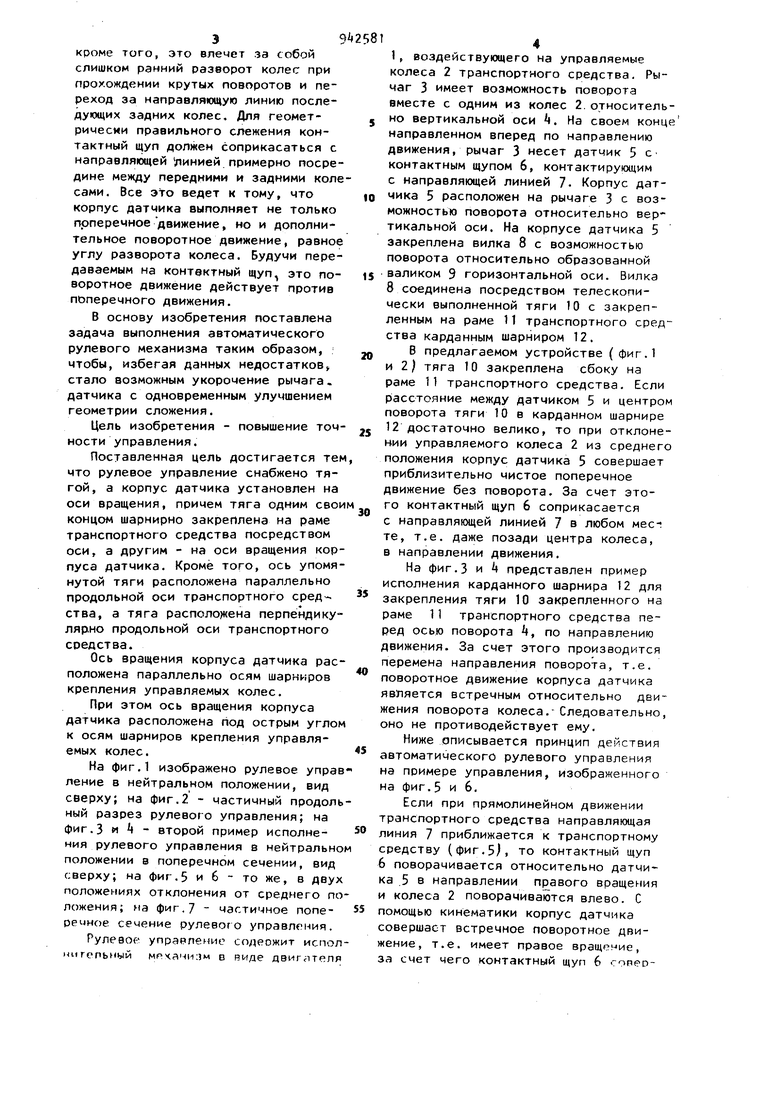
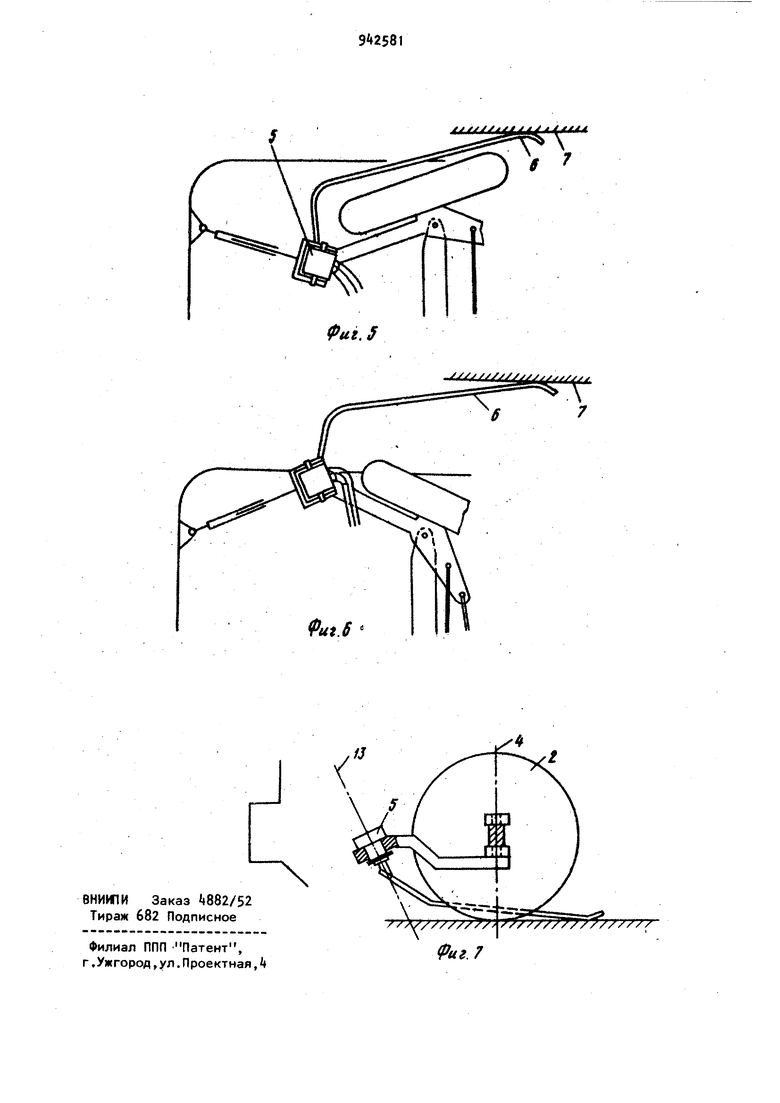
20 с осью рычаг является по-возможности более длинным и контактный щуп производит считывание возможно более далеко (смотря по направлению движения) перед направляющей линией. Э9 кроме того, это влечет за собой слишком ранний разворот колес при прохождении крутых поворотов и пе реход за направляющую линию последующих задних колес. Для геометричесии правильного слежения контактный щуп должен соприкасаться с направляющей линией примерно посредине между передними и задними коле сами. Все 3Yo ведет к тому, что корпус датчика выполняет не только поперечноедвижение, но и дополнительное поворотное движение, равное углу разворота колеса. Будучи передаваемым на контактный щуп, это поворотное движение действует против поперечного движения. В основу изобретения поставлена задача выполнения автоматического рулевого механизма таким образом, чтобы, избегая данных недостатков, стало возможным укорочение рычага, датчика с одновременным улучшением геометрии сложения. Цель изобретения - повышение точ ности управления. Поставленная цель достигается тем что рулевое управление снабжено тягой, а корпус датчика установлен на оси вращения, причем тяга одним свои концом шарнирно закреплена на раме транспортного средства посредством оси, а другим - на оси вращения кор пуса датчика. Кроме того, ось упомя нутой тяги расположена параллельно продольной оси транспортного средства, а тяга расположена перпендикулярно продольной оси транспортного средства. Ось вращения корпуса датчика рас положена параллельно осям шарниров крепления управляемых колес. При этом ось вращения корпуса датчика расположена под острым угло к осям шарниров крепления управляемых колес. На фиг.1 изображено рулевое упра ление в нейтральном положении, вид сверху; на фиг.2 - частичный продол ный разрез рулевого управления; на фиг.З и 4 - второй пример исполнения рулевого управления в нейтральн положении в поперечном сечении, вид сверху; на фиг.5 и 6 - то же, в дву положениях отклонения от среднего п ложения; на фиг.7 частичное поперечное семение рулевого управления. Рулевое упрарленис содержит испо нкгспьиый мрчачи; м в ниде двигател 1, воздействующего на управляемые колеса 2 транспортного средства. Рычаг 3 имеет возможность поворота вместе с одним из колес 2. относительно вертикальной оси . На своем конце направленном вперед по направлению движения, рычаг 3 несет датчик 5 с контактным щупом 6, контактирующим с направляющей линией 7- Корпус датчика 5 расположен на рычаге 3 с возможностью поворота относительно вертикальной оси. На корпусе датчика 5 закреплена вилка 8 с возможностью поворота относительно образованной валиком 9 горизонтальной оси. Вилка 8 соединена посредством телескопически выполненной тяги 10 с закрепленным на раме 11 транспортного средства карданным шарниром 12. В предлагаемом устройстве (фиг.1 и 2) тяга 10 закреплена сбоку на раме 11 транспортного средства. Если расстояние между датчиком 5 и центром поворота тяги 10 в карданном шарнира 12 достаточно велико, то при отклонении управляемого колеса 2 из среднего положения корпус датчика 5 совершает приблизительно чистое поперечное движение без поворота. За счет этого контактный щуп 6 соприкасается с направляющей линией 7 в любом месте, т.е. даже позади центра колеса, в направлении движения. На фиг.З и k представлен пример исполнения карданного шарнира 12 для закрепления тяги 10 закрепленного на раме 11 транспортного средства перед осью поворота , по направлению движения. За счет этого производится перемена направления поворота, т.е. поворотное движение корпуса датчика является встречным относительно движения поворота колеса.-Следовательно, оно не противодействует ему. Ниже описывается принцип действия автоматического рулевого управления на примере управления, изображенного на фиг.5 и 6. Если при прямолинейном движении транспортного средства направляющая линия 7 приближается к транспортному средству (фиг.5), то контактный щуп 6 поворачивается относительно датчика .5 в направлении пр авого вращения и колеса 2 поворачиваются влево. С помощью кинематики корпус датчика совершает встречное поворотное движение, т.е. имеет правое вращение, за счет чего контактный щуп 6 сопеошает левое поворотное движение относительно корпуса датчика 5 навстре чу первоначально начавшемуся)правому повороту, т.е. стабилизируется прямо линейное движение транспортного сред ства. То же происходит при отходе направляющей линий - фиг.6 от транспортного средства. Поворотное движение относительно валика 9 необходимо для того, чтобы выравнивать вертикальное подпружинен ное движение рамы транспортного сред ства относительно оси. На фиг.7 .изображен пример, где ос поворота 13 корпуса датчика 5 наклонена относительно оси поворота кол са 2. За счет этого, расстояние между центром поворота колеса и воображаемым центром поворота датчика укорачи вается и еще более возрастает точность регулирования. Предлагаемое устройство применяется во всех автоматических рулевых управлениях, даже в таких, которые управляются электронным путем, и позволяет отказаться от дополнительного углового датчика. Формула изобретения 1. Автоматическое .рулевое управление транспортного средства, содержащее исполнительный механизм, кинематически связанный с управляемыми колесами, шарнирно закрепленными на раме транспортного средства, рычаг, жестко закрепленный на кинематическо связи со стороны противоположной установке исполнительного механизма относительно шарнира крепления yrtpa ляемых колес, датчик в корпусе и щуп, установленные на рычаге и связанные друг с другом посредством управляющего устройства, обеспечивающего передачу сигнала датчика к исполнительному механизму противоположного по знаку направлению перемещения исполнительного механизма, отличающееся тем, что, с целью повышения точности управления, рулевое управление снабжено тягой , а корпус датчика установлен на оси ращения,причем тяга одним своим концом шарнирно закреплена на раме транспортного средства посредством оси, а другим - на оси вращения корпуса датчика 2.Рулевое управление по п.1, отличающееся тем, что ось тяги расположена параллельно продольной оси транспортного средства. 3.Рулевое управление по п.1, отличающееся тем, что тяга расположена перпендикулярно продольной оси транспортного средства. k. Рулевое управление по п.1, отличающееся тем, что ось вращения корпуса датчика расположена параллельно осям шарниров крепления управляемых колес. 5. Рулевое управление по п.1, отличающееся там, что ось вращения корпуса датчика расположена под острым углом к осям шарниров крепления управляемых колес. Источники информации, принятые во внимание при экспертизе 1. выложенная заявка ФРГ № 2729766, кл. В С2 О 5/06, 1977.
/ Ф14г. /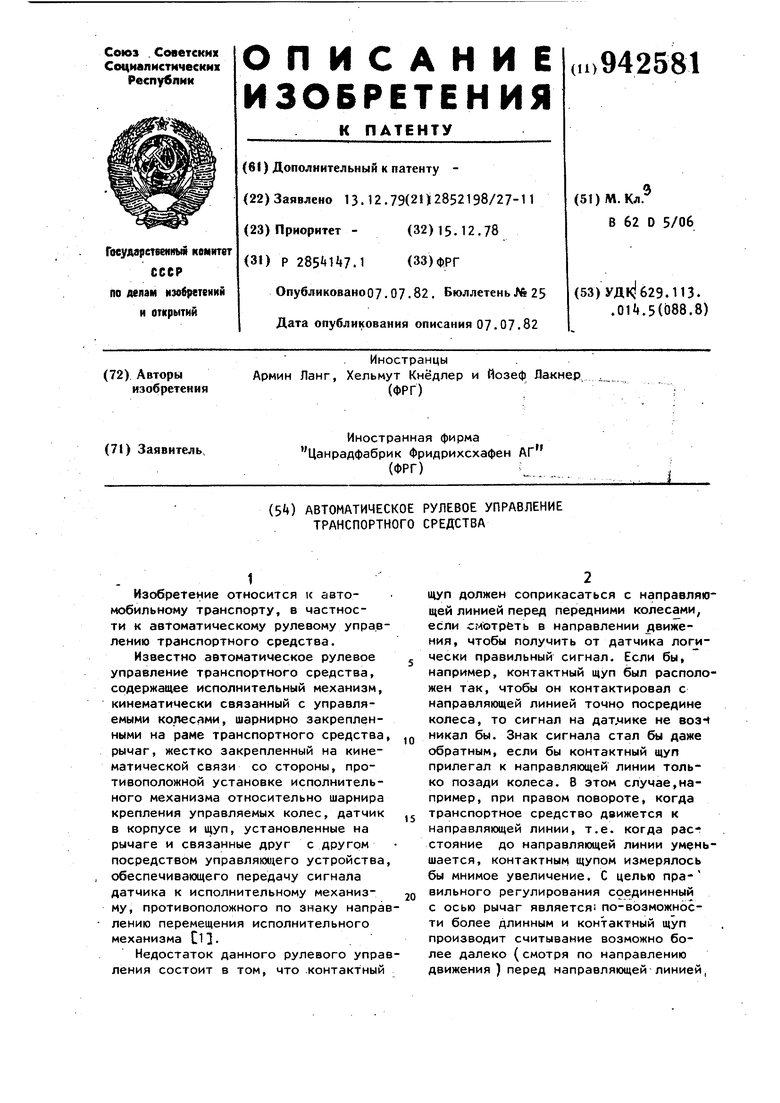

X
//
Фиг. 2
4
Фиг.З
i
Фиг. 5
