1. ,
Изобретеаше относится к станкостроен, HJBO и робототехнике и может найти при-менение в станках-автоматах, автсматяческих линиях и роботах.
Известен захват, содержавши поворотные подщгужинешоле рычагн, шариирно закрепленные на вилке, размещенной на штанге, и втулку, связанную с приводе 1 .
Недостатксйм известного захвата яш ляется сложность управления и низкая надежность.
Цель изобретения - упрозцеяне систе мы управления н повышение надежности.
Цель достигается тем, что захват снабжен подпружиненным в направлении оси захвата поворотнь1М кулаком и подпружиненной собачкой, кроме того, на штанге выпотшены профвшьные пазы, а на кулаке - продольные, причем собачка згифеплена на кулаке и размешена в пазах штангя. Кроме того, на втулке закреплено дополнительно введенное регутшруемое в направлении ося захвата
упорное кольцо, предаазнач шое для взаимодействия с .
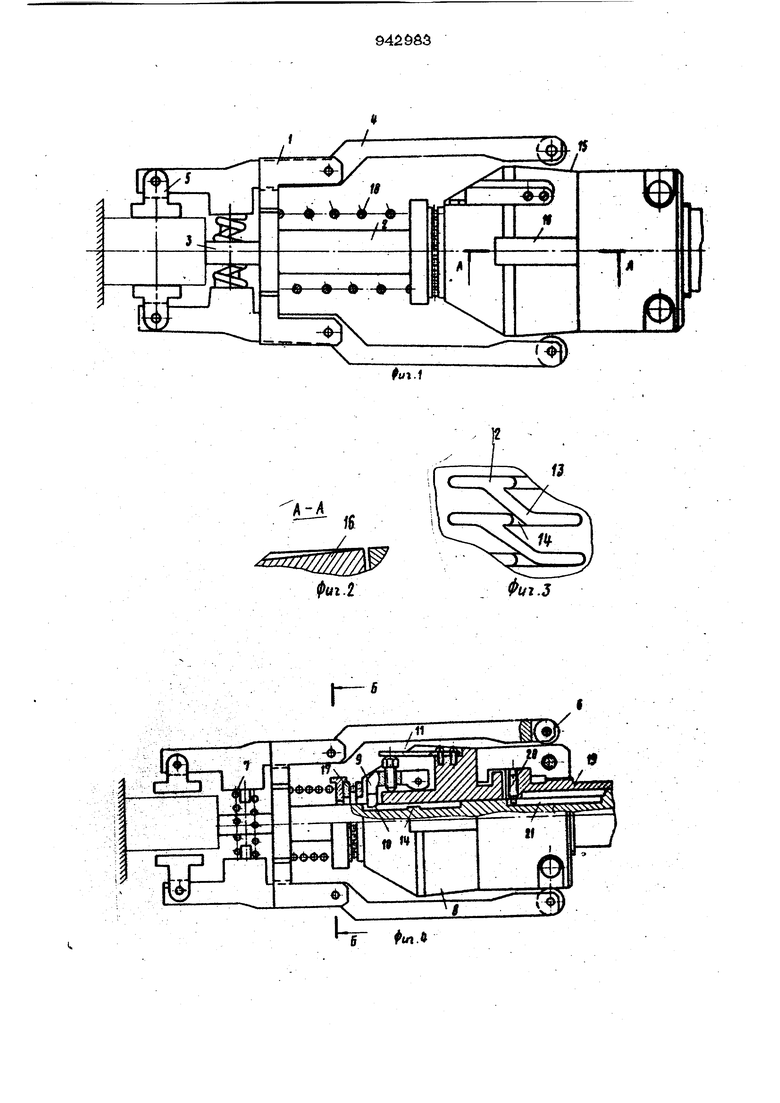
На ФЕШ. 1 изображен зшсват в закрытом положении, общий вящ на фвг. 2 разрез А-А на фиг. 1; на фиг. 3 - раэвертка пазов; на фиг. 4 - захват в сугкрытом ПОЛОЖЕНИИ с иырывом на собачке; на 4иг. 5 - разрез Б|-Б на флг. 4; на фкг. 6 и 7 - правая часть захвата в закрытом вертшсальном попскЖеввв; ва ЕЕГ- В - -разрез В-В на фяг, 6.
Захват COCTOSECT из вилки 1, шдтолн иенной заодно со штангой 2 и упорами 3. В лазах вилки 1 свободно посажёны .иа осях рычаги 4. На одном-конце рычагов 4 закреплены захватные губки 5, на другом - ролики 6. Рычаги 4 разжвмаются пружиной 7. На штсшге 2 уств иоелен кулак 8, в пазу котсрого установлена собачка 9 со CKOCGM 1О, поджимаемая плоской пружиной 11. Собачка 9 входит в продольные 12 и наклонные {участки 13 пазов, выполненные на штав ге 2 (ФЕТ. 3). В продольных падах 12 Бьшолнен выступ 14 высотой пршерно в хгоповину высоты пазов 12 и 13, На наружной кршической поверхности 15 купвха 8 вылопнеяы продольные гсааы 16 (см. фир. 2), Между кулаком 8 я вилкой 1 через подцшшшк 17 установлена хфужина 18. На правом конце штав ги установлена втулка Х9, в которой ухугановлен вдаят 20, входщпий в шпоночный паз 21 на иичанге 2. На ксяце штан ги 2 выполнен упор 22, На втулке 19 с помсяпыо резьбы закрехшены две полу гайш 23 с наружной дюшндрааческой . поверхностью, стягиваз оле винтами 24. Пспугайки 23 имекхг кольцевые выступы 25, вход$шше выточку 26 на кулаке 8. В)ь1ступы 25 играют рэль регулируемых в осевом направлении колосс. В закрытом положении захвата полугайки 23 с- помощью резьбы на втулке 19 могут занимать два хюложения, показанных соответственно на фиг. 6 и 7. На фиг. 6 полугайки 23 установлены так, что упор 22 штанги 2 входит в соприкосновение о., втулкой 19. На фиг. полугайки 23 у,становлеяы так, что между упором 22 и втулкой 19 есть зазор (f-. Захват работает следующим образсял. При перемещении втулки 19, связанной с приводом, влево упор 3 соприкасается с-захватываемой деталью. При дальнейшем перемещении втулки 19 она скользит БИНТОМ 20 по пазу 21 и с помошсью полугаек 23 толкает кулак 8, сзкимая пружину 18ч -Ролики 6 .съезжают с конической поверхности 15 кулака 8, рычаги 4 под действием пружизаы 7 разжимаются и освобождают деталь. При перемещении кулака 8 влево собачка 9 скользит по прямому пазу 12 и, наткнув шись на выступ 14, начинает скольавггь по пазу 13, поворачивая кулак 8 до тех пор, пока пазы 16 не станут против роликов 6. При обратном ходе втулки 19 кулак 8 под действием пружины 18 начинает перемедаться вправо. Собажа 9 перемещается по прямому пазу 12. При этом скос 10 собачки 9 позволяет ей перескочить через выступ 14 и продолжать движение по пазу 12. Кулак 8 не поворачивается и поэтому ролики 6 вкатываются в Пазы 16 кулака 8 Рычаги 4 остакзггся раздвинутыми. При следующем перемещении втулки 19 влево происхо взт поворот кулака 8, против роликов 6 устанавливается кошческая поверхность 15. При обратном ходе втуЯЭ4isxt 19 ролики 6 вкатываются на поверх ность 15 и, перемераясь по ней, зажЕ мают деталь. В завнсямоста от положений полугаек 23 зажим детали может осушествляться только при помощи усилия, развиваемого пружиной 18 (фиг. 6), либо при помощи усзюшя пружины 18 и веса детали (фиг. 7). При перемещении втулки 19 ввер1 с(фиг.6) ор 22 штанла 2 входит с ней в соприкосновение. Таким образом, вес штаяги 2 вилки 1, рычагов 4 и груза воспринимается втулкой 19 через упор 22. Усилие зажима детали в этом случае определяется усилием пружины 18, топкаюдаей, кэдсак 8 с конической поверхностью 15 и разжимающей ролики 6. В случае, изображенном на фиг. 7, зажим детали происходит раньше, чем упрр 22 касается втулки 19. Между ними остается зазор сЛ. Усилие зажима детали в этом случае определяется весом детали, усзилием пружины 18 и весом рычагов 4 и штанга 2. Использование даннсях) захвата позволяет использовать простую систему управления, повысить надежность работы и обеспечить захват детали с определенным усилием. Фор м«у ла изобретения 1.Захват, содержащий повсфотные подпружинеяные рычаги, шарнирио закрепленные на вилке, размещенной на штанге, и втулку, связанную с приводом, отличающийся тем, что, с целью пошлиения надежност работы, он сиабHlieH подпружияенным в иаправле1ши оси заясвата и устаисжленвым с возможностью осевого перемещения и поворота кулачком с закрепяешюй на ием подгфужииеявой бобачкой, причем на щтаиге выпопиевы профшшные пазы, а на кулачке продольные, при sffOM собачка кулачка размещу в пазах штавги. 2.Захват по п. 1, о т л я ч а ю iщ и и с я тем, что о снижен уженным BxeibooM которое устаиоелено на втулке с возможносоъю ретулировочвых перемещений в кахфавленив оси захвата. Источяяки информации, ирвнятые во внимание при экспертизе 1. Авторское свидетельство СССР hb 545461, кя.В 25 J 15/ОО, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для набора планок иглами или колками | 1937 |
|
SU55219A1 |
| Устройство к токарному автоматудля СВЕРлЕНия ОТВЕРСТий | 1979 |
|
SU804212A1 |
| Автоматический станок для нарезки ниппелей | 1933 |
|
SU49735A1 |
| Автоматический прибор для механического двухстороннего кернения | 1944 |
|
SU68843A1 |
| Многошпиндельный токарный автомат | 1974 |
|
SU567554A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
| Устройство для кантования обрабатываемых деталей на конвейере | 1987 |
|
SU1537623A1 |
| Токарный многошпиндельный станок | 1989 |
|
SU1660850A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |

B-S
