Изобретение относится к машиностроению и может быть использовано в отраслях промышленности, где требуется осуш,ествить перенос деталей за наружную поверхность, например в манипуляторах и автооператорах.
Известны захватные устройства конструкции ЭНИМС типа ТОП1, ТОП2 и Э142, содержаш,ие соединенные рычагами подпружиненные диски, центральную ось, связывающую оба диска через систему кулачков и защелок, которая по команде сводит и разводит диски, перемещая таким образом зажимные кулачки, связанные с нижним диском 1.
Недостаток данных устройств заключаерся в том, что расстояние от корпуса, за которьЕЙ перемещают захватное устройство, до оси изделия зависит от размера зажимаемой поверхности. Чем меньше диаметр зажимаемого вала, тем дальше от его оси остановится шток с диском и прикрепленной к ним пластиной, за которую перемещают захват, и наоборот.
Колебание осевого положения зажимных деталей затрудняет использование указанных устройств в тех случаях, когда требуется точное позиционирование (например доставка инструментальной оправки под шпиндель станка и т. д.).
Известно также захватное устройство, содержащее основание и подпружиненный относительно него корпус со смонтированными в нем захватом, механизмом фиксации захвата, в котором имеется втулка с расположенными внутри нее основной и дополнительной круговыми зубчатыми гребенками, и поворотным фиксатором с двумя двусторонними зубьями 2.
В указанном устройстве основная гребенка механизма ограничения хода зажимных рычагов выполнена, подвижной относительно втулки в осевом направлении и подпружиненной относительно основания. Однако такое решение не обеспечивает достаточно надежной работы устройства. При перемещении подпружиненной гребенки возможны ее перекосы и заклинивание, что может привести к сбоям в работе устройства.
Цель изобретения - повышение точности и надежности работы захватного устройства.
Указанная цель достигается тем, что в устройстве для захватывания деталей, содержащем основание, подпружиненный относительно корпуса кулак с размещенными в нем зубчатыми гребенками, зубья которых выполнены с односторонним скосом, а также смонтированный на корпусе щток с установленным на нем поворотным фиксатором, выполненным с двумя зубьями, имеющими двусторонние скосы, и захват, расположенный на корпусе, одна из гребенок выполнена
четырехзубой и с четырьмя продольными пазами, ширина которых соответствует ширине зубьев поворотного фиксатора, при этом кулак, корпус с захватом и фиксатор
установлены с возможностью перемещения в осевом направлении и подпружинены относительно основания.
Наличие в основной гребенке продольных пазов способствует надежному срабатыванию устройства в любом положении, а установка кулака, корпуса с захватом и механизма фиксации захвата с возможностью перемещения в осевом направлении и подпружиненными относительно основания позволяет обеспечить точное позиционирование независимо от колебаний размеров зажимных деталей.
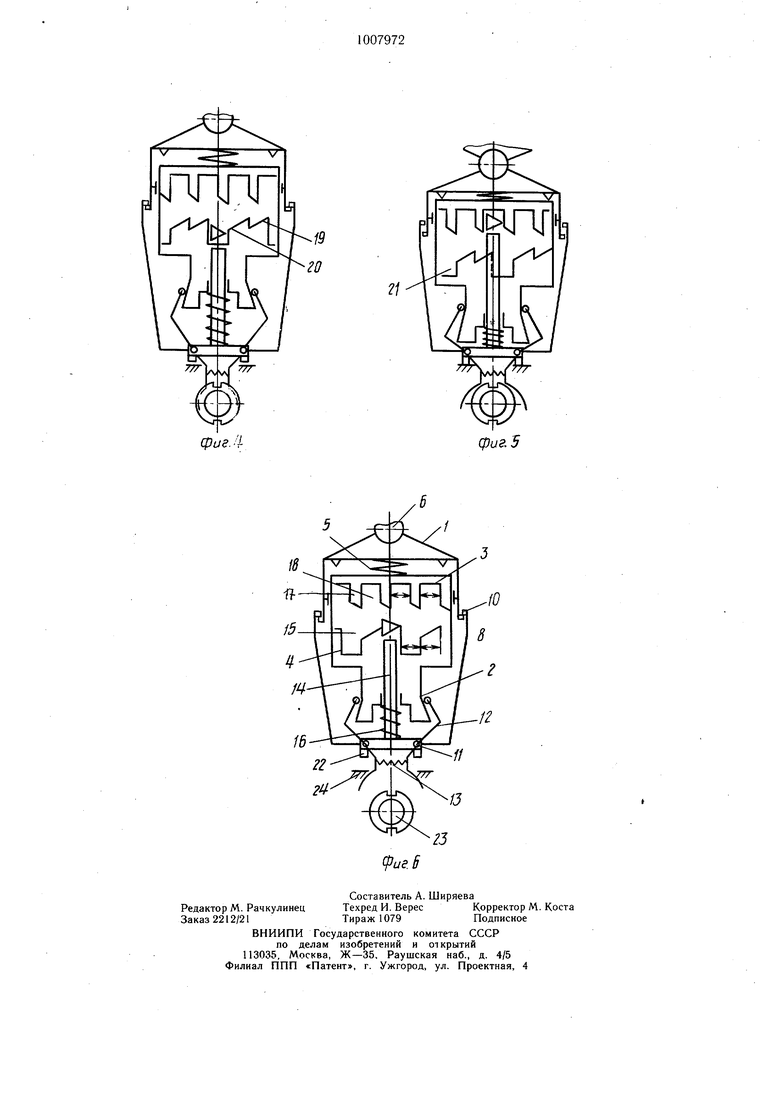
На фиг. 1 показаны два захватных устройства на общей оси; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схема устройства в зажатом положении; на фиг. 5 - то же, в положении на упоре; на фиг. 6 - то же, в разжатом положении.
Устройство состоит из основания 1, в прорезях которого расположены подвижные
5 кулаки 2.
Внутри кулака 2 закреплены основная 3 и дополнительная 4 круговые зубчатые гребенки. В основании 1 расположена пружина 5, взаимодействующая через гребенку 3 с кулаком 2. Основание 1 закреплено на поворотной оси 6 манипулятора, связанной, например, с гидроцилиндром (не показан). На основании I выполнены направляющие 7 для корпуса 8. В нижней части основания 1 выполнен паз 9, куда входи i регулируемый упор 10, прикрепленный к
5 корпусу 8. В корпусе 8 установлены две оси 11 с рычагами 12, поджатыми пружиной 13 к кулаку 2.
С корпусом 8 жестко связан щток 14, подвижно входящий в кулак 2. На конце
0 штока 14 установлен двузубый поворотный фиксатор 15. Между кулаком и корпусом 8 расположена пружина 16, рассчитанная на большее усилие, чем пружина 5.
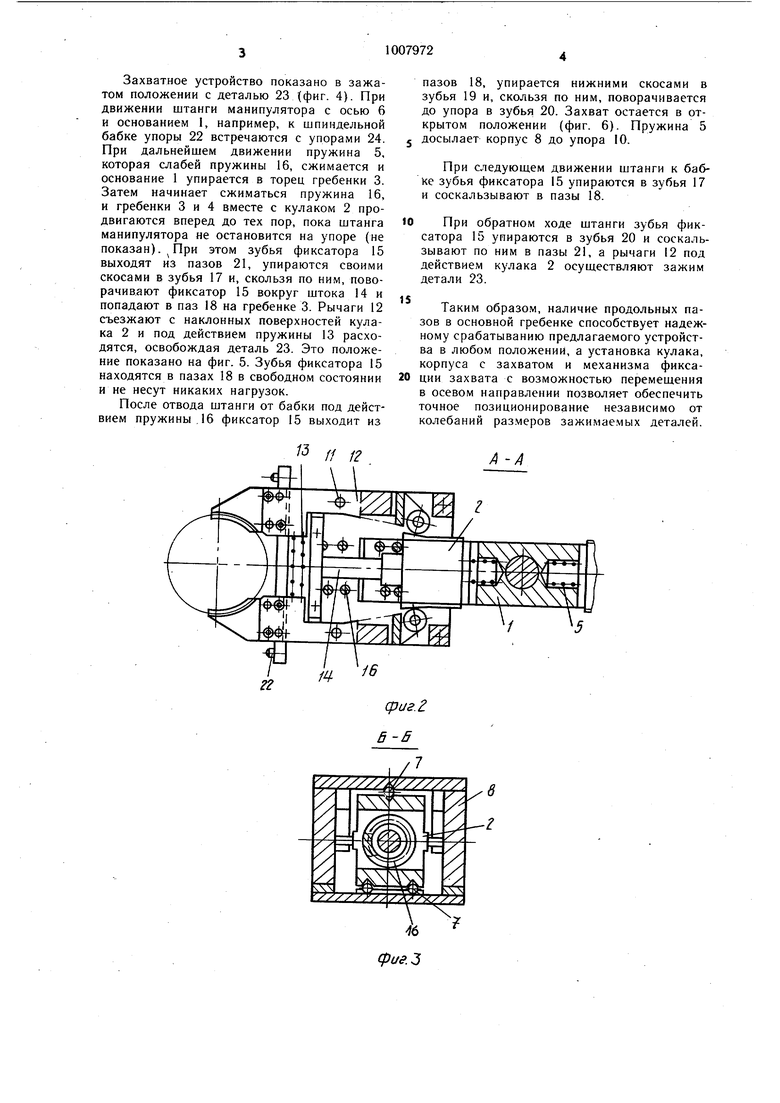
На фиг. 4-6 показана развертка гребенок 3 и 4.
5 На гребенке 3 выполнены четыре зуба 17 и четыре паза 18, а на гребенке 4 - четыре зуба (по 2) 19 и 20 и два паза 21. Ширина пазов 18 и 21 должна соответствовать ширине зубьев фиксатора 15. Гребенки 3 и 4 установлены друг относительно друга
таким образом, что зубья 20 находятся против пазов 18.
К корпусу 8 прикреплены упоры 22.
На фиг. 1 показана деталь 23, например фреза с оправкой, зажатая в рычагах 12. Упоры 22 взаимодействуют с упорами 24, установленными на смежных узлах.
Устройство работает следующим образом.
Захватное устройство показано в зажатом положении с деталью 23 (фиг. 4). При движении штанги манипулятора с осью 6 и основанием 1, например, к шпиндельной бабке упоры 22 встречаются с упорами 24. При дальнейшем движении пружина 5, которая слабей пружины 16, сжимается и основание 1 упирается в торец гребенки 3. Затем начинает сжиматься пружина 16, и гребенки 3 и 4 вместе с кулаком 2 продвигаются вперед до тех пор, пока штанга манипулятора не остановится на упоре (не показан). При этом зубья фиксатора 15 выходят из пазов 21, упираются своими скосами в зубья 17 и, скользя по ним, поворачивают фиксатор 15 вокруг штока 14 и попадают в паз 18 на гребенке 3. Рычаги 12 съезжают с наклонных поверхностей кулака 2 и под действием пружины 13 расходятся, освобождая деталь 23. Это положение показано на фиг. 5. Зубья фиксатора 15 находятся в пазах 18 в свободном состоянии и не несут никаких нагрузок.
После отвода штанги от бабки под действием пружины. 16 фиксатор 15 выходит из
5 // 12
пазов 18, упирается нижними скосами в зубья 19 и, скользя по ним, поворачивается до упора в зубья 20. Захват остается в открытом положении (фиг. 6). Пружина 5 досылает корпус 8 до упора 10.
При следуюш,ем движении штанги к бабке зубья фиксатора 15 упираются в зубья 17 и соскальзывают в пазы 18.
При обратном ходе штанги зубья фиксатора 15 упираются в зубья 20 и соскальзывают по ним в пазы 21, а рычаги 12 под действием кулака 2 осуш.ествляют зажим детали 23.
Таким образом, наличие продольных пазов в основной гребенке способствует надежному срабатыванию предлагаемого устройства в любом положений, а установка кулака, корпуса с захватом и механизма фиксации захвата с возможностью перемещения в осевом направлении позволяет обеспечить точное позиционирование независимо oj колебаний размеров зажимаемых деталей.
А -А
(риг. 2. б-В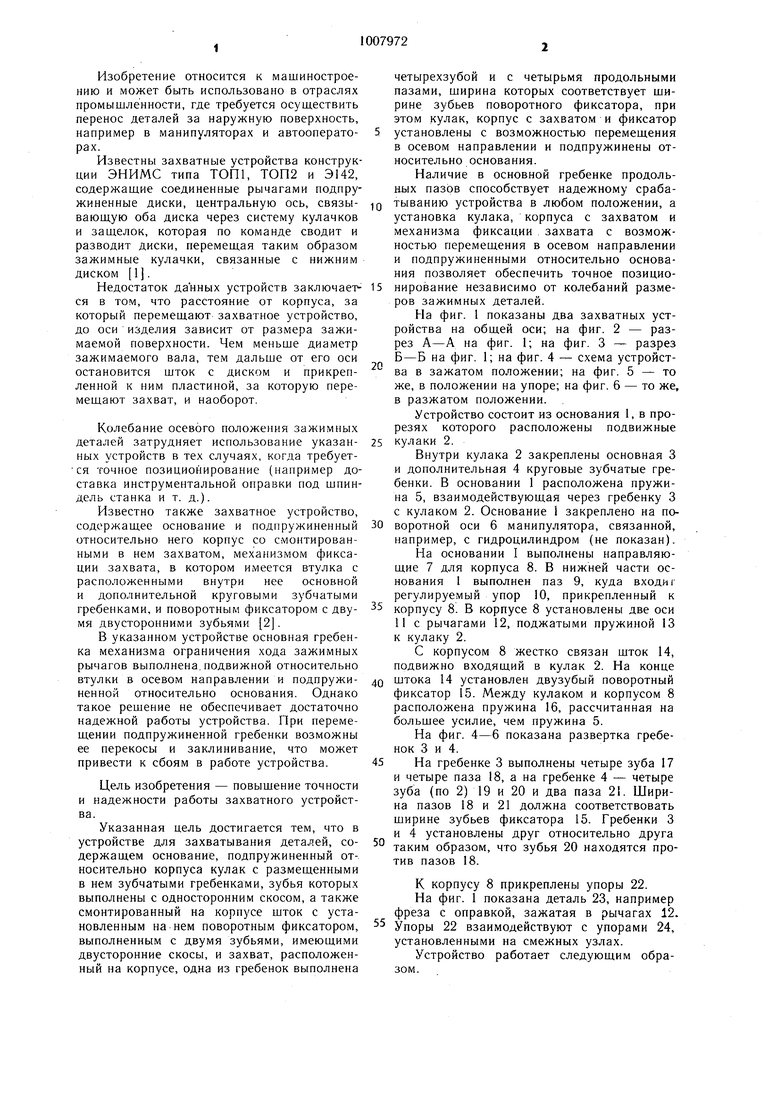
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1980 |
|
SU899325A1 |
| Захватное устройство | 1978 |
|
SU766727A1 |
| Захватное устройство | 1975 |
|
SU549311A1 |
| Устройство для автоматической смены инструментов | 1980 |
|
SU865601A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Устройство для захвата деталей | 1976 |
|
SU835706A1 |
| Механизм раскрытия инструментальной головки резьбонарезного станка | 1972 |
|
SU472759A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Вакуумное захватное устройство | 1983 |
|
SU1094735A1 |
| Захватное устройство для перегрузки колесной техники | 1984 |
|
SU1181976A1 |
УСТРОЙСТВО ДЛЯ ЗАХВАТЫВАНИЯ ДЕТАЛЕЙ, содержащее основание. подпружиненный относительно корпуса ку лак с размещенными внем зубчатыми гребенками, зубья которых выполнены с односторонним скосом, а также смонтированный на корпусе щток с установленным на нем поворотным фиксатором, выполненным с двумя зубьями, имеющими двусторонние скосы, н захват, расположенный на корпусе, отличающееся тем, что, с целью повыщения надежности и точности позиционирования, одна из гребенок выполнена четырехзубой и с четырьмя продольными пазами, ширина которых соответствует ширине зубьев поворотного фиксатора, при этом кулак, корпус с захватом и фиксатор установлены с возможностью перемещения в осевом направлениии подпружинены относительно основания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бобров В | |||
| П | |||
| Проектирование загрузочно-транспортных устройств к станкам и автоматичёски.м линиям.М., «Машиностроение, 1964, с | |||
| Арматура для железобетонных свай и стоек | 1916 |
|
SU259A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захватное устройство | 1975 |
|
SU549311A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
