(5) СПОСОБ РЕГУЛИРОВАНИЯ ЗАГРУЗКИ КОНУСНОЙ .ДРОБИЛКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования загрузки конусной дробилки | 1982 |
|
SU1079292A1 |
| Способ загрузки конусной эксцентриковойдРОбилКи | 1979 |
|
SU844041A1 |
| Устройство управления автоматической загрузкой дробилок | 1983 |
|
SU1128981A1 |
| Устройство регулирования загрузки конусной дробилки | 1980 |
|
SU937015A1 |
| Способ автоматического регулирования режима работа дробилки | 1985 |
|
SU1351702A1 |
| СПОСОБ ДРОБЛЕНИЯ МАТЕРИАЛА В КОНУСНОЙ ИНЕРЦИОННОЙ ДРОБИЛКЕ | 1999 |
|
RU2174444C2 |
| Способ автоматического управления технологическим процессом рудоподготовки | 1986 |
|
SU1373436A1 |
| Способ контроля размеров разгрузочной щели конусной дробилки | 1984 |
|
SU1433493A1 |
| СПОСОБ ДРОБЛЕНИЯ МАТЕРИАЛА В КОНУСНОЙ ИНЕРЦИОННОЙ ДРОБИЛКЕ С ПОЛУЧЕНИЕМ КУБОВИДНОГО ПРОДУКТА ПРИ МИНИМАЛЬНОМ ПЕРЕИЗМЕЛЬЧЕНИИ | 2009 |
|
RU2423180C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2001 |
|
RU2204438C1 |
-.
. .-.
Изобретение относится к технике автоматизации процесса дробления в конусных дробилках, применяемых в горно-обогатительной и химической промышл(енности.
Известен способ регулирования загрузки конусной дробилки, включающий создание слоя материала над входом в дробящую зону путем изменения производительности дробилки. fo
Этот способ предусматривает равномерное заполнение рудой приемной емкости, дробилки с помощью распределителя питания и контроль высоты слоя ру над входом в дробящую зону, 5 причем уровень стабилизируемого слоя держат постоянным J.
Недостатком этого способа является то, что он может быть использован .только для руд, физико-механические 20 свойства которых практически не изменяются л На практике эти свойства руд изменяются во времени в значи2
тельных пределах (влажность, исходная крупность, крепость/.
Это приводит к невозможности достижения оптимальных технологических параметров при использовании этого способа.
Цель изобретения - повышение качества регулирования.
Это достигается тем, что согласно способу регулирования загрузки конусной дробилки, включающему создание слоя материала над входом в дробящую зонупутем изменения производительности дробилки, дополнительно измеряют пропускную способность дробилки и при отклонении пропускной способности от заданного значения изменяют величину слоя материала над входом в дробящую зону пропорционально вычисленному значению.
При наличии слоя руды в приемной емкости дробилки производительность
ее максимальна, но изменяется в зависимости от дробимости руды (физико-механических свойств.
Поэтому для обеспечения стабильно надежной работы механизмов дробилки необходимо изменять степень ее заполнения. Этим обеспечивается работа дробилки без пиковых нагрузо на узлы и механизмы и в допустимых пределах.
Реализация предлагаемого способа предусматриаает контроль нескольких заданных уровней заполнения дробилки. Причем для дробимого материала с различными физико-механическими свойствами, определяющими его дробимость (крупность, крепость, влаж ность), для обеспечения стабильной работы дробилки при условии псшучения наилучших технологических пока- зателей (качество готового соответствуют различные уровни заполнения.
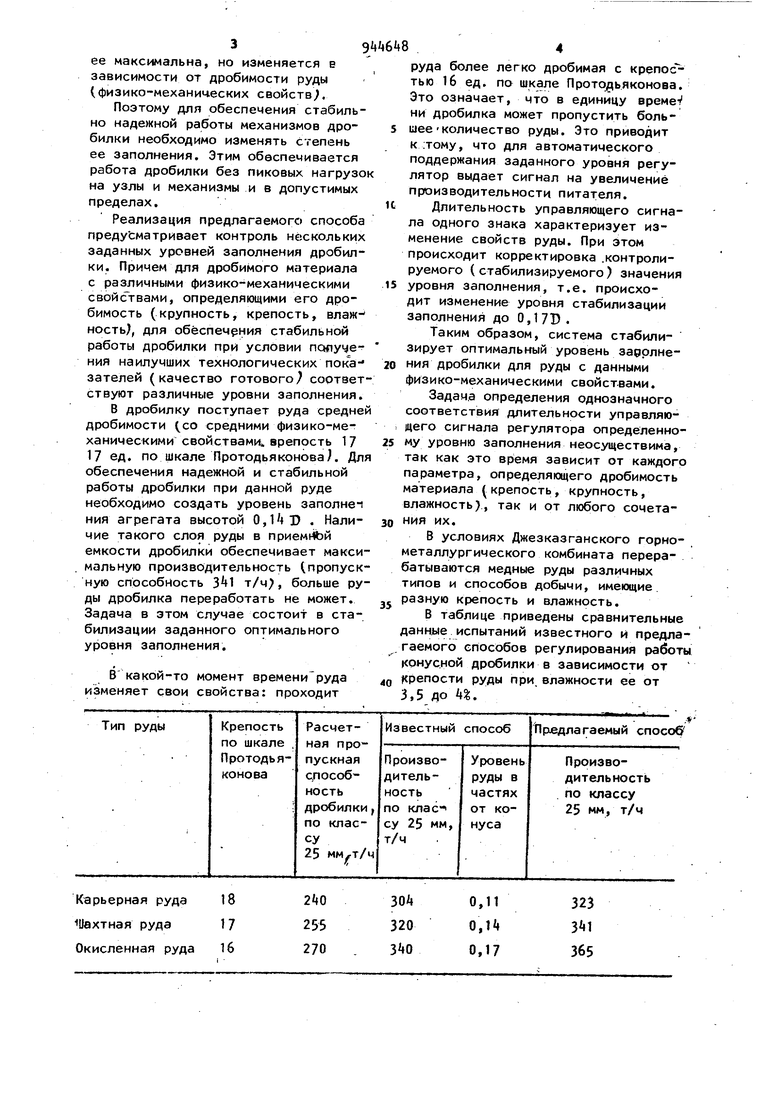
В дробилку поступает руда средне дробимости (со средними физико-механическими свойствами врепость 17 17 ед. по шкале Протодьяконова. Дл обеспечения надежной и стабильной работы дробилки при данной руде необходимо создать уровень заполнеч ния агрегата высотой 0, . Наличие такого слоя руды в приемйЬй емкости дробилки обеспечивает максимальную производительность (пропускную способность т/ч;, больше руды дробилка переработать не может. Задача в этом случае состоит в стабилизации заданного оптимального уровня заполнения.
В какой-то момент времени руда изменяет свои свойства: проходит
18
2ЦО 17
255 16 270
руда более легко дробимая с крепос тью 16 ед. по шкале Протодьяконова. Это означает, что в единицу времеУ ни дробилка может пропустить большее -количество руды. Это приводит к :тому, что для автоматического поддержания заданного уровня регулятор выдает сигнал на увеличение производительности питателя.
Длительность управляющего сигнала одного знака характеризует изменение свойств руды. При этом происходит корректировка .контролируемого (стабилизируемого) значения уровня заполнения, т.е. происходит изменение уровня стабилизации заполнения до 0,17D.
Таким образом, система стабилизирует оптимальный уровень заррлне0 ния дробилки для руды с данными физико-механическими свойствами.
Задана определения однозначного соответствия длительности управляющего сигнала регулятора определенному уровню заполнения неосуществима, так как это время зависит от каждого параметра, определяющего дробимость материала (крепость, крупность, влажность), так и от любого сочетания их.
В условиях Джезказганского горнометаллургического комбината перерабатываются медные руды различных типов и способов добычи, имеющие разную крепость и влажность.
В таблице приведены сравнительные данные испытаний известного и предлагаемого способов регулирования работы конусной дробилки в зависимости от
крепости руды при влажности ее от 3,5 до k%.
323
0,11 O.U З 365 0,17
Экономический эффект от предлагаемого способа применительно к обогатительной фабрике производительностью в 10 млн т руды в год, где установлено 12 дробилок КМД-2200 складывается из повышения производительности дробилок на 5-7% по клас су 25 мм, снижения средневзвешенной крупности на Ц-6%, увеличения межремонтных сроков на 15-20, и состав ляет 50-70 тыс.руб.
Формула изобретения
Способ регулирования загрузки конусной дробилки, включающий соз бЦВ6
дание слоя материала над входом в дробящую зону путем изменения прои водительности дробилки, о т л и чающийся тем. что, с целью 5 повышения качества регулирования, дополнительно измеряют пропускную способность дробилки и при отклонении пропускной способности от заданного значения изменяют величину слоя материала над входом в дробящую зону пропорционально вычиcJ1eннoмy значению
Источники информации, принятые во внимание при экспертизе
