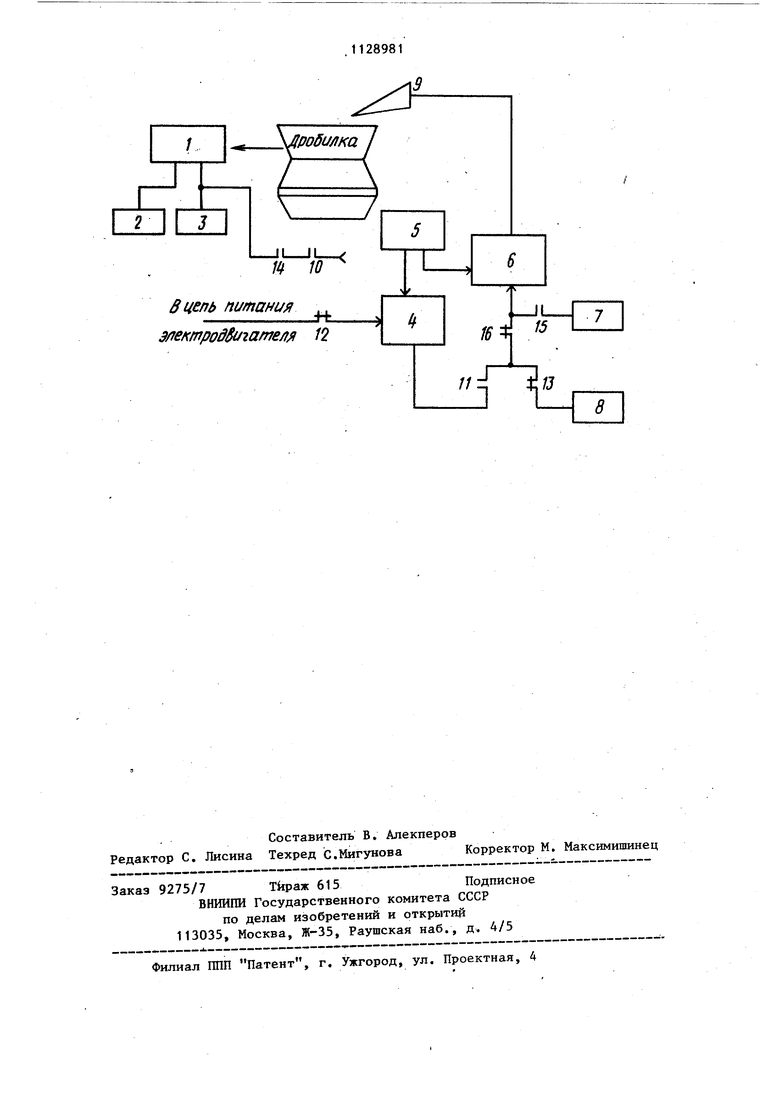
Изобретение относится к устройст вам загрузки дробилок и может быть использовано в горно-с богатительной промьшшенности, на предприятиях химической промьшленности и производства строительных материалов.. Для стабильной работы дробильного оборудования необходш ю обеспечить равномерную подачу материала в дробящую полость, причем существенные изменения физико-механически свойств исходной руды требуют изменения скорости (а следовательно и количества) подачи материала в значительныХ( пределах. Известны устройства; регулирую1цие загрузку дробилок по току приво ного электродвигателя, по мощности, потребляемой двигателем, по удельной мощности привода (1 . Недостатком этих устройств является низкая точность регулирования ВВИДУ того, что ток (мощность) двигателя привода не однозначно зависит от работы, затрачиваемой непосредственно на дробление, а зависит от работы на преодоление трения, которая меняется в зависимости от износа узлов конкретно каждой дробилки. Наиболее близким к предлагаемому является устройство управления автоматической загрузкой дробилок, включающее уровнемер и регулятор загрузки с исполнительным механизмом С2. Устройство содержит таймер и бло коррекции уставок уровня. Работа устройства предусматривает контроль и стабилизацию нескольких уровней заполнения дробилки, причем переход на новый уровень стабилизации проис ходит автоматически при изменении физико-механический свойств руды. Недостатком известного устройства является сложность достижения высокой точности регулирования, так как изменение -свойств руды происходит, как правило, не скачкообразно, а плавно. Поэтому оценка характера изменения управляющего сигнала регулятора является сложной те нической задачей и надежность получаемых результатов очень ала. Цель изобретения - повьипение точ ности управления. Цель достигаете тем, что устрой ство управленияавтоматической загрузкой дробилок, включающее уровне мер и регулятор загрузки с исполни- , тельным механизмом, снабжено датчиком активной мощности, вторичным регистрирующим прибором с электродвигателем, задатчиками минимальной и максимальной мощности, а уровнемер выполнен с реле нижнего и верхнего уровней с источником питания, причем реле верхнего уровня подключено к источнику питания через первые замыкающие контакты реле нижнего и верхнего уровней, первый размыкающий контакт реле нижнего уровня включен в цепь питания электродвигателя вторичного регистрирующего прибора, вход которого подключен к первому выходу датчика активной мощности, измерительный вход регулятора загрузки соединен с выходом вторичного регистрирующего прибора через второй замыкающий контакт реле нижнего уровня и первьй размыкающий контакт реле верхнего уровня, с выходом задатчика максимальной мощности - через второй размыкающий контакт реле нижнего уровня и первый размыкающий контакт реле верхнего уровня и с выходом задатчика минимальной мощности - через второй замыкающий контакт реле верхнего уровня, а задающий вход регулятора загрузки подключен, к второму выходу датчика активной -мощности. На чертеже приведена блок-схема предлагаемого устройства. Устройство включает уровнемер 1 с выходными реле 2 и 3 нижнего и верхнего уровней соответственно, вторичньй регистрирующий прибор 4 с преобразовательным выходом, датчик 5 контроля активной мощности привода дробилки, регулятор 6, задатчик 7 минимальной мощности, задатчик 8 максимальной мощности и исполнительный механизм . Реле нижнего уровня содержит замьжающие контакты 10 и 11 и размыкающие контакты 12 и 13, а реле верхнего уровня содержит замыкающие контакты 1А и 15 и размыкающие контакты 16. Реле подключены к источнику питания (не обозначен). Принцип работы устройства заключается в следующем. Предположим, в дробилку поступает руда средней дробимости (со средними физико-механическими свойствами). Первоначально перед запуском системы задатчиком 8 устанавливается задание, обеспечивающее режим, при, ко 5 . . тором система стремится завалить дробилку, т.е. создать требуемый слой в приемной емкости дробилки. Допустим, уровнемер 1 зафиксировал достижение нижнего контролируемого уровня. Тогда срабатывает реле 2, размыкающим контактом Т2 разрывая цепь питания электродвигателя регист рирующего прибора, размыкающим контактом 13 отключая выход задатчика 8 а замыкающим контактом 11 через размыкающий контакт 16 соединяя преобразовательный выход регистрирующего прибора с задающими входом регулятора. При этом стрелка прибора, регистрирующего мощность, останавливается в положении.- пои котором происходит заполнение дробилки, а на пре образовательном выходе прибора сохраняется постоянное значение этой мощности в течение всего времени торможения прибора. Сигнал преобразовательного выхода регистрирующего прибора .воспринимается регулятором в качестве сигнала задания. Таким образом, система запоминает значение мощности, при котором происходи заполнение дробилки и автоматически вводит это значение в качестве новой установки задания ,по мощности. Допустим, в какой-то момент врем ни изменяются физико-механические свойства руды, например, идет более легко дробимая руда. Это значит, чт дробилка в единицу времени сможет пропустить большее количество материала при том же значении потребляе мой мощности, и система начинает х личивать подачу материала через исполнительный механизм 9 так, чтобы мощность стремилась к заданному зна чению. При поступлении более тяжело дробимых руд пропускная способность дробилки уменьшается и толщина слоя заполнения начинает возрастать; с другой стороны увеличивается и велн 14 чина потребляемой мощности. В этом случае уровнемер фиксирует достижение верхнего контролируемого уровня заполнения дробилки, срабатывает реле 3 верхнего уровня, своим размыкающим контактом 16 отключая от задающего входа регулятора преобразовательный выход прибора 4, замыкающим контактом 15 подключая выход задатчика 7 минимальной мощности, и через замыкающий контакт 14 и замыкающий контакт 10 устанавливается на самоподхват. Величина задания минимальной мощности выбирается такой, чтобы система стремилась к опорожнению дробилки. Через некоторое время уровнемер фиксирует достижение величины заполнения дробилки ниже нижнего контролируемого уровня. Тогда реле нижнего и верхнего уровней возвращаются в исходное состояние, при этомна задающий вход регу-. лятора подается сигнал от задатчика 8 максимальной мощности, и система стремится завалить дробилку. При достижении нижнего контролируемого уровня заполнения срабатьшает реле 2, разрывая контактом 12 цепь питания электродвигателя регистрирующего прибора, и сигнал с его преобразовательного выхода через контакты 11 и 16 подается на задающий вход регулятора 6 в качестве новой уставки регулирования. При этом система ; через исполнительный механизм 9 обеспечивает подачу материала данных физико-механических свойств в количестве, при KOTdpoM значение потребляемой мощности стабилизируется. Таким образом, предлагаемое устройство автоматически изменяет уставки потребляемой мощности дробилки с учетом степени ее заполнения, отражающей изменение свойств исходной руды, а следовательно, повышает точность управления. Jl п 8 цепь питания злектродВигател IIX w f2
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования загрузки дробилки рудой | 1984 |
|
SU1250327A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЩЕКОВОЙДРОБИЛКИ | 1972 |
|
SU335001A1 |
| Способ автоматического управления технологическим процессом рудоподготовки | 1986 |
|
SU1373436A1 |
| Устройство для регулирования загрузки конусной дробилки | 1982 |
|
SU1037959A1 |
| Способ регулирования загрузки конусной дробилки | 1982 |
|
SU1079292A1 |
| Самонастраивающаяся система управления барабанной мельницей | 1974 |
|
SU521012A1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1131537A1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| Способ автоматического управления дробильным комплексом | 1976 |
|
SU567494A1 |
| Система управления дробилкой | 1987 |
|
SU1595567A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ .ЗАГРУЗКОЙ ДРОБИЛОК, включающее уровнемер и регулятор загрузки с исполнительным механизмом, отличающееся тем, что, с целью повышения точности управления, оно снабжено датчиком активной мощности, вторичным регистрирующим прибором с электродвигателем, задатчиком минимальной и максимальной мощности, а уровнемер выполнен с реле верхнего и нижнего уровней с источником питания, причем реле верхнего уровня подключено к источнику питания через первые замыкающие контакты реле нижнего и верхнего уровней, первый размыкающий контакт реле нижнего уровня включен в цепь питания элек.тродвигателя вторичного регистрирующего прибора, вход которого подключен к первому выходу датчика активной мощности, измерительный вход регулятора загрузки соединен с выходом вторичного регистрирующего прибора через второй замыкающий контакт реле (Л нижнего уровня и первый размыкающий . контакт реле верхнего уровня, с выходом задатчика максимальной мощности - через второй размыкающий контакт реле нижнего уровня и первый размыкающий контакт реле верхнего уровня и с выходом задатчика миниisi мальн й мощности - через второй засх мыкающий контакт реле верхнего уровсо ня, а задающий вход регулятора за00 грузки подключен к второму выходу датчика активной мощности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зубков Г.А | |||
| и др | |||
| Автоматизация процессов обогащения руд цветных металлов | |||
| Недра, 1967, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство регулирования загрузки конусной дробилки | 1980 |
|
SU937015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| . | |||
