(54) РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-храповой механизм | 1982 |
|
SU1027458A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| Шаговый искатель | 1980 |
|
SU892515A1 |
| МАШИНА ДЛЯ МОЙКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1971 |
|
SU315725A1 |
| Реверсивный храповой механизм | 1988 |
|
SU1634887A1 |
| БАРОВРЕМЕННОЙ ЗАТВОР ДЛЯ ВВОДА ПАРАШЮТНОЙ СИСТЕМЫ ПРИ КАТАПУЛЬТИРОВАНИИ КРЕСЛА С ЛЕТЧИКОМ | 2002 |
|
RU2209153C1 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| Гравировальный полуавтомат | 1982 |
|
SU1057244A1 |
| Нумератор | 1978 |
|
SU820970A1 |
| Поворотно-делительное устройство | 1986 |
|
SU1426751A1 |
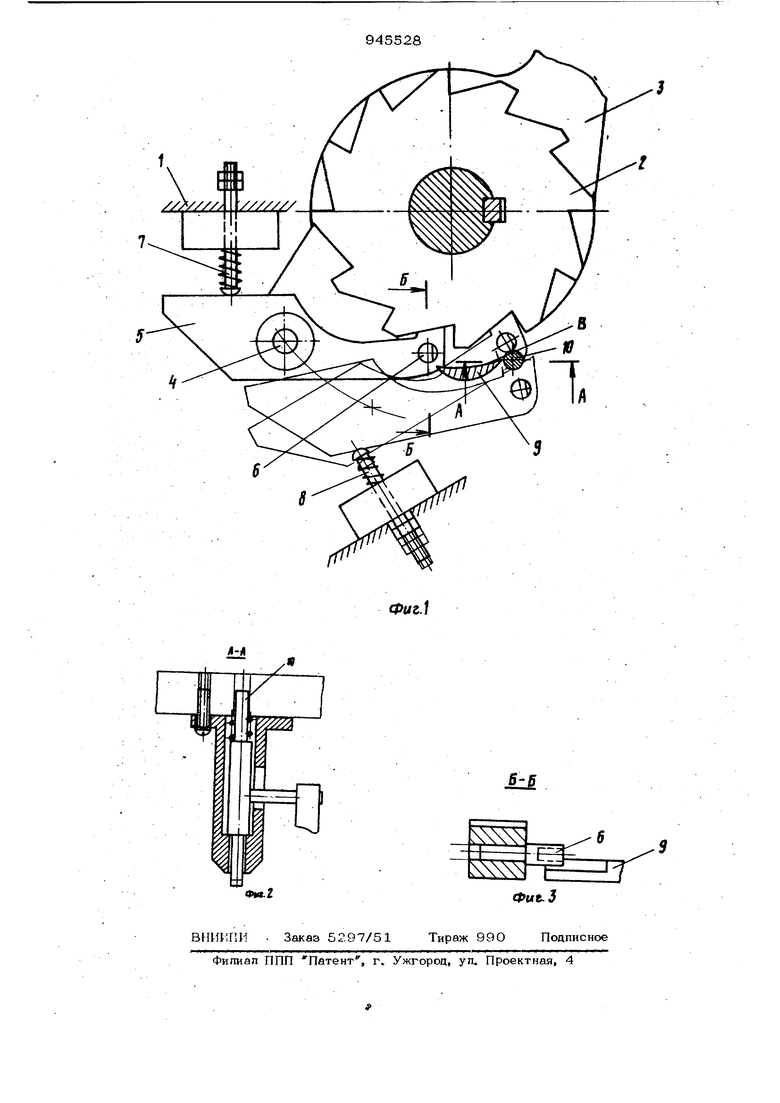
Изобретение относится к машивостроению, а именно к механизмам, осуществляющим, например, поворот на опредепеннь1й угол стола станка. Известен рычажио-храповой механизм содержащий корпус, размещенное в нем храповое колесо, привод, содержащий шатун и коромысло и взаимодействующую с ними собачку для поворота храпового колеса fl. . Недостатком конструкции такого меха низма является возможность проскакийания храпового колеса в момент нарущения контакта колеса с собачкой из-за на личия сил инреции. Наиболее близким к изобретению по технической сущности и достигаемому ре зультату является рычажно-храповой механизм, содержащий корпус, размещенное в нем храповое колесо, кинематически связанное с ним исполнительное звено установленную на нем и взаимодействующую с храповым колесом собачку, имеющую фиксируюший палец, и неподвижно установленные в корпусе упоры для возврата собачки в исходное положение 2. Недостатком известного механизма является его невысокая надежность вследствие возможного перебега храпового колеса на угол, больщий, чем ход собачки. Целью изобретения является повыще- ние надежности работы за счет предот вращения проскакивания храпового колеса. Цель Достигается тем, что рычажнохраповой механизм снабжен взаимодействующими с фиксирующим папьцем собачки неподвижно закрепленным на корпусе серпообразным сектором и упором, кинематически связанным с исполнительным звеном. На фиг. 1 схематично, изображен рычажно-храповой механизм; на фиг. 2 разрез.А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Рьшажно-храповой механизм содержит корпус 1, размещенное в нем храповое колесо 2, кинематически связанное с ним исполнительное звено 3, устанопленную 04 на нем на оси 4 собачку 5 с 4«ксируюшим пальоем 6, взаимодействующею с храповым колесом. В Kojniyce неподвижно установлены noft пружиненные упоры 7 и 3 серпообразный сектор 9, а также кинематически св51зан- ный с исполнительным эвеном упор 10. Рычажно-храповой механизм работает следующим о/е разом. В HcxoAHCNvi положении исполнитепьноё звено 3 удерживает собачку 5 во впадине храпового колеса 2 посредством под пружиненного упора 7. При повороте исполнительного звена 2 собачка S повораhiBaeT храповое колесо 2 против часовой с грелки, при этом фиксирующий палец 6 собачки, сколзьзя по серпообразной поверх ности В неподвижного сектора 9, выполняет функцию ограничителя, не давая воэможности собачке 5 выйти из впадины храпового колеса 2 под действием сил инерции, что исключает произвольное проскакивание Х1: апового колеса в процессе поворота. По окончании взаимодействия фиксирующего пальца 6 с неподвижным , сектором 9 палец 6 упирается в,упор 10, который теперь является ограничителем, предотвращая перебег храпового колеса в конце хода. Затем по команде от ку пачка (не показан), при фиксации исполнитель-. ного звена, упор 10 освобождает фиксирующий палец 6 и собачка под действием подпружиненного упора 8 Выталкивается из впадин1л храпового колеса 2 и возвращается в исходное положение до контакта с подпружиненным упором 7. Далее цикл повторяется. 84 Таким образом предотвращается проскакивание храпового колеса, что повышает надежность работы механизма. I Изобретение может быть использовано при проектировании станков различного назначения, где требуется точная установка на определенный угол поворотных стоФормула изабретения Рычажно-храповоЙ механизм, содержащий корпус, размещенное в нем храповое колесо, кинематически связанное с ним исполнительное звено, установленную на нем и взаимодействующую с храповым колесом собачку, имеющую фиксирующий палец, и неподвижно установленные в корпусе упоры для возврата собачки в исходное положение, о тличающийся тем, что, с целью повышения надежности работы за счет предотвращения проскакивания драпового колеса, он снабжен взаимодействующими с фиксирующим папьцем собачки неподвижно за:креппенным на корпусе серпообразным сектором и упором, кинематически связанным с исполнительным звеном. Источники информации, принятые во внимание при экспертизе 1.Артоболевский И. И. Механизмы в современной технике. М., Наука, 1979, т. 3, с. 110, рис. 1717. 2.То же, с. 146, рис. 176О (прототип)..
