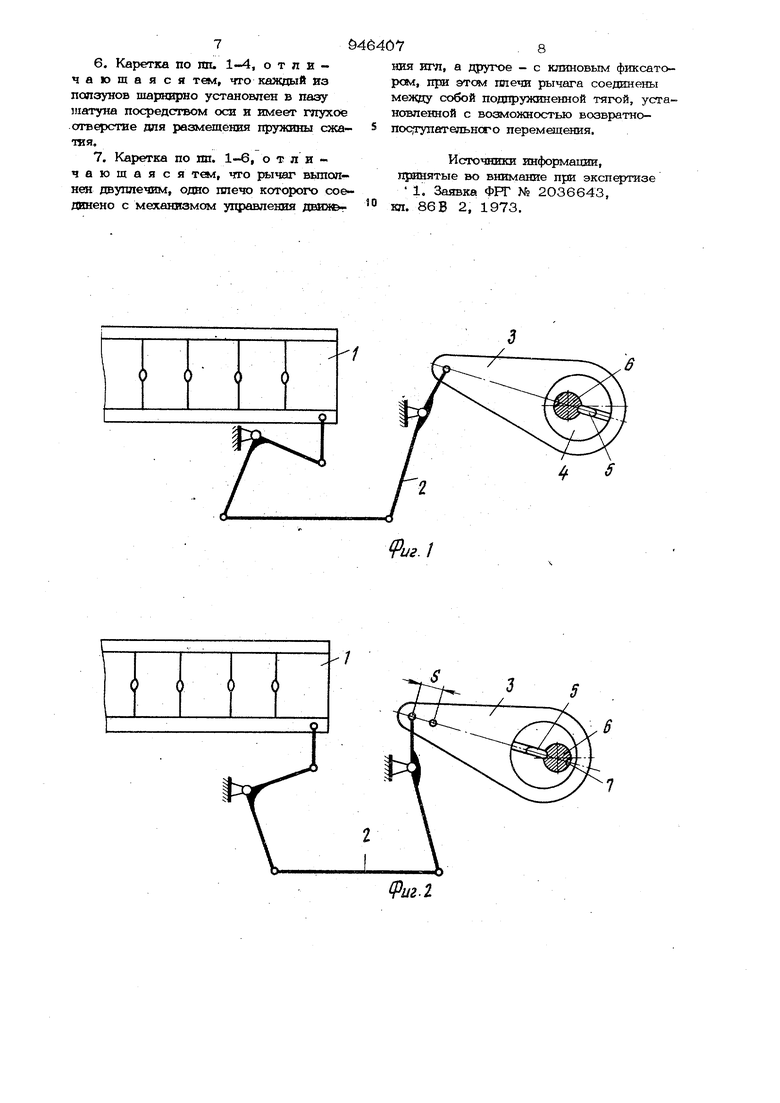
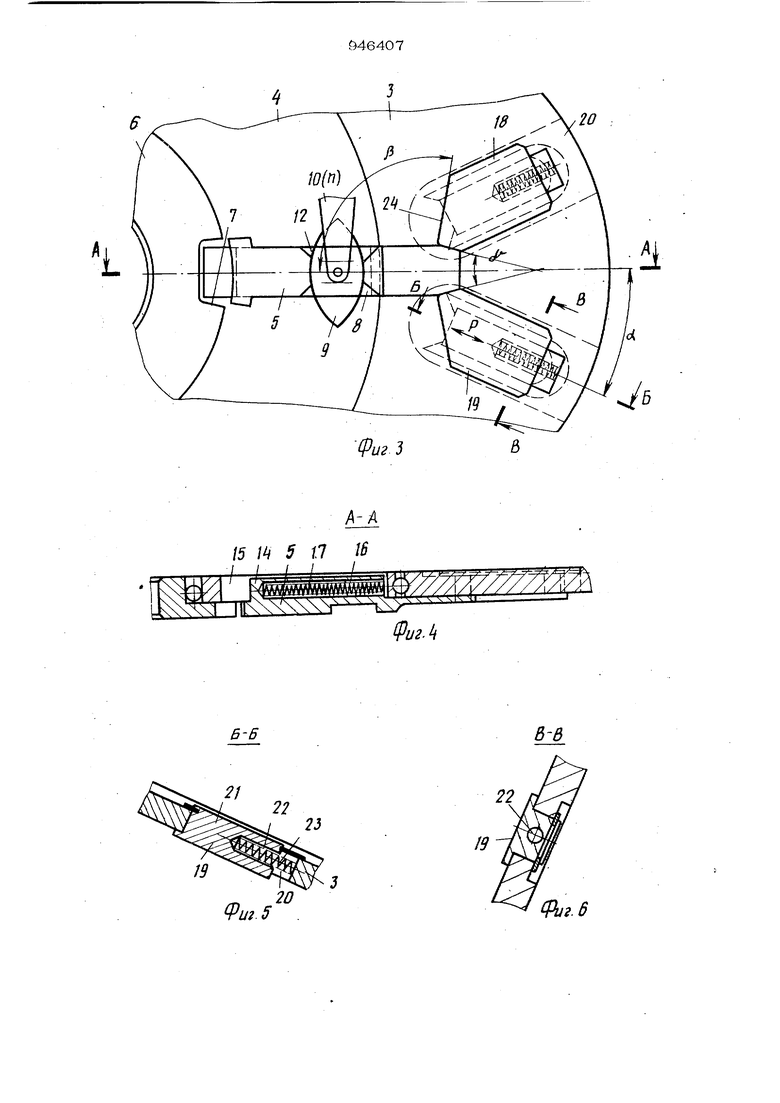
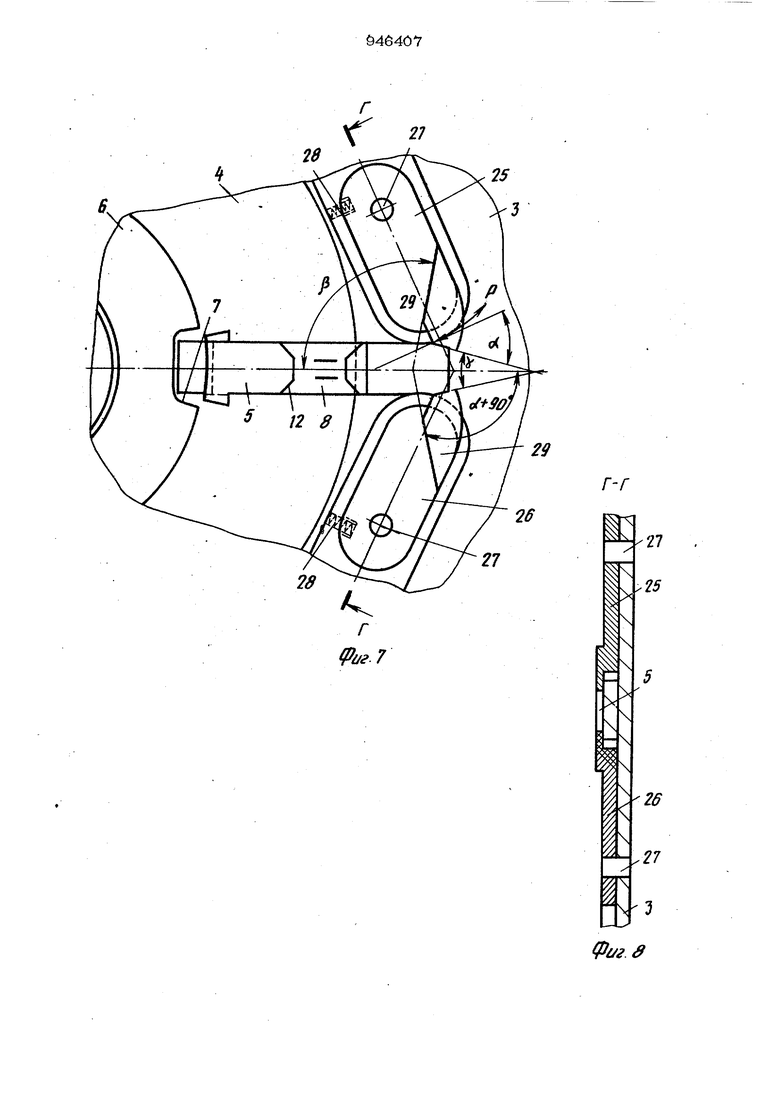
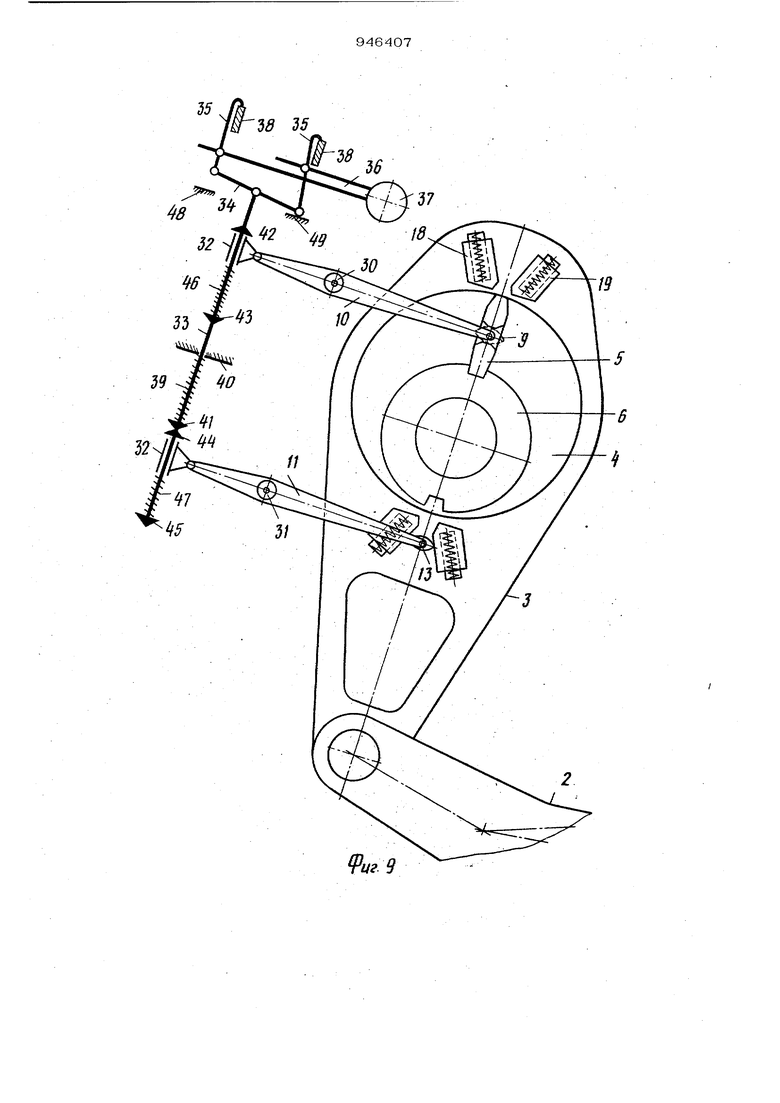
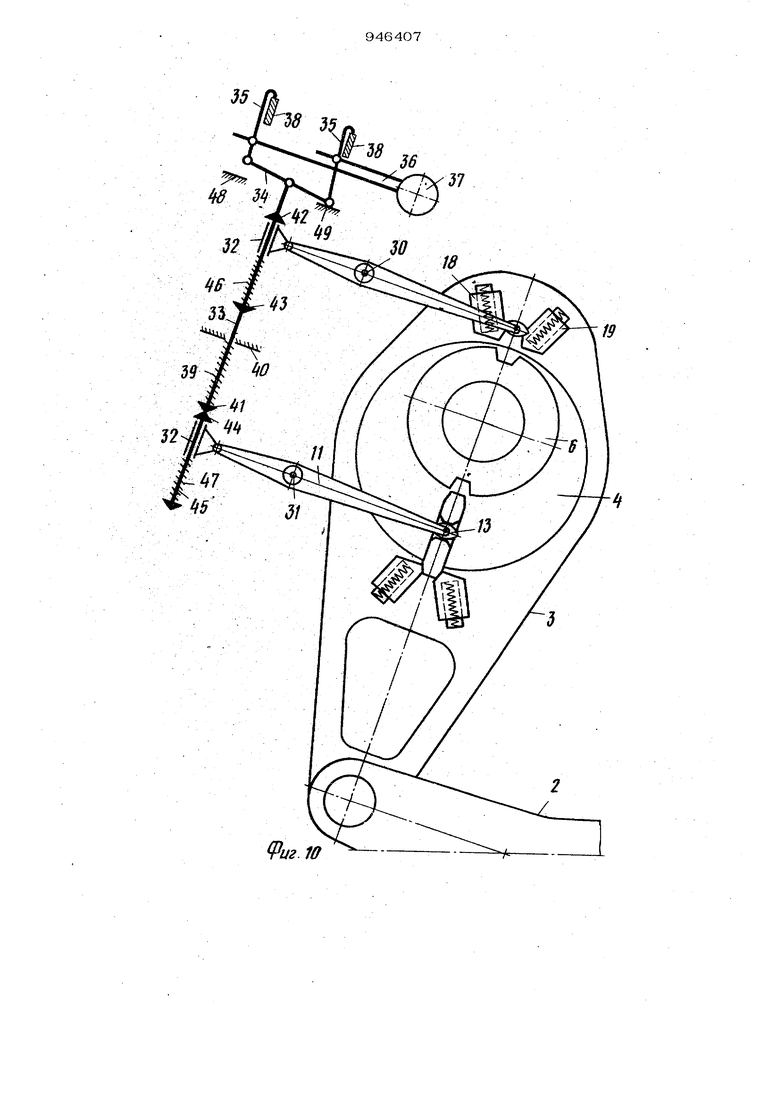
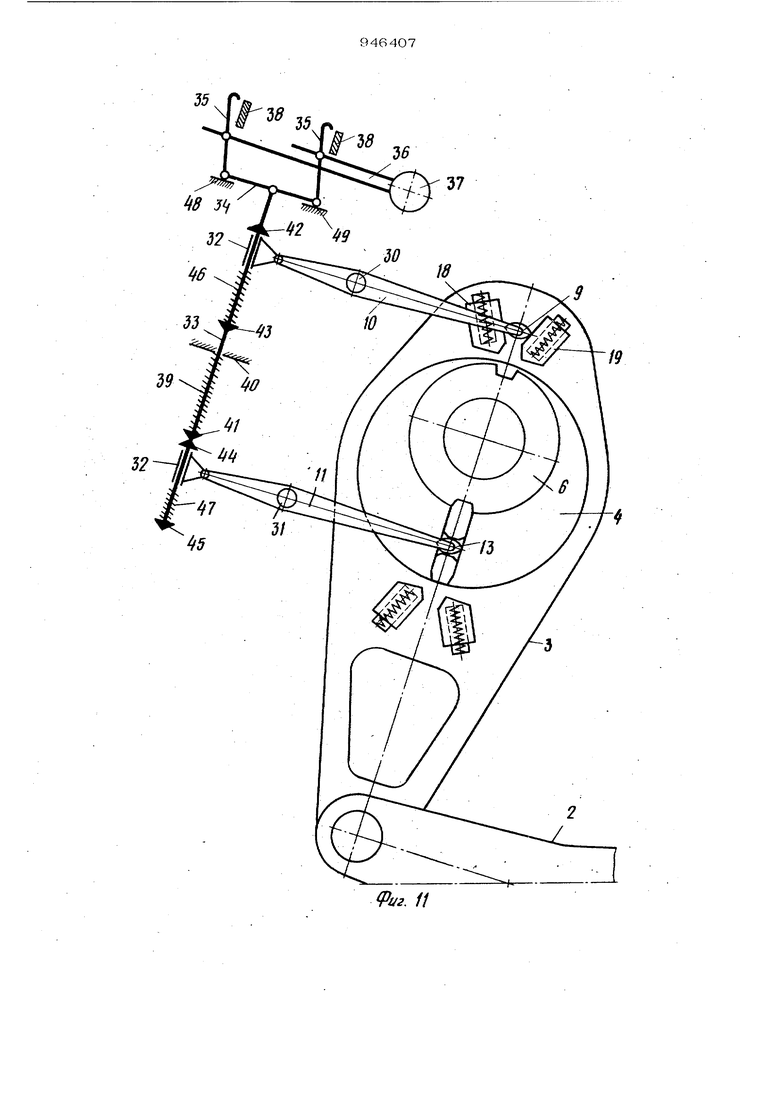
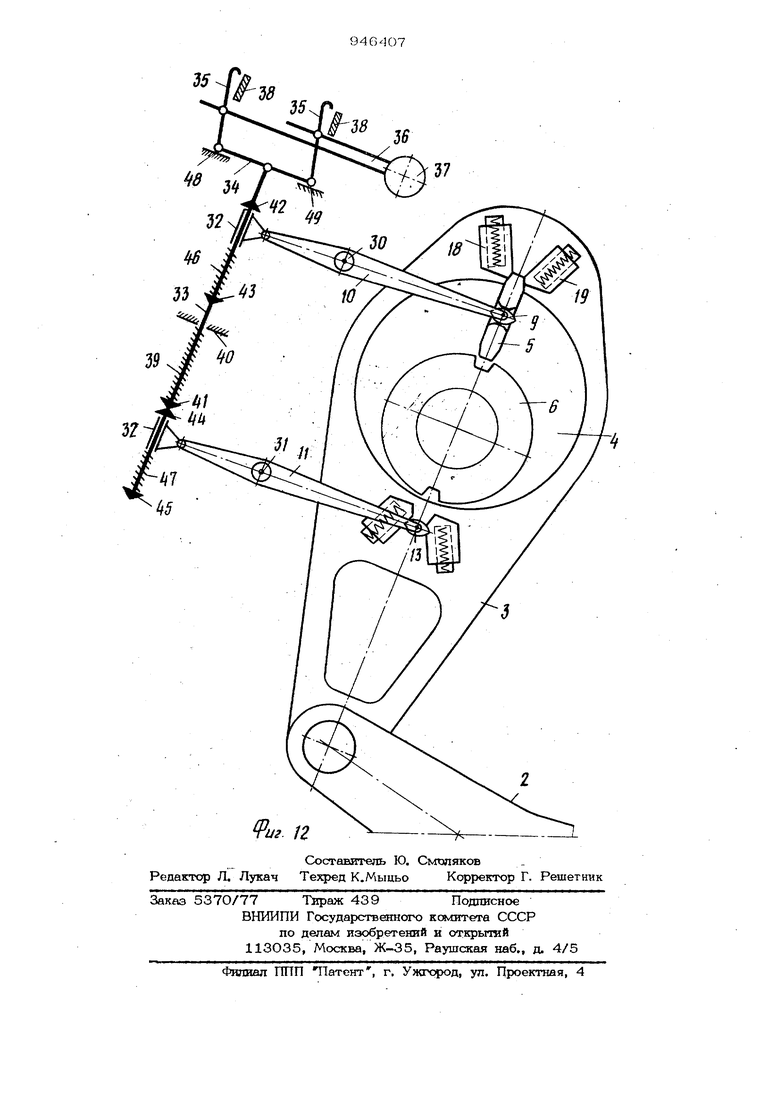
Прагчем коней клинового фиксатора, контактярующий с ползунами, имеет скосы, образующие между собой утоп Ю-БО, предпоггительно 30°. Проя этсм каждый из ползунов выпопнея с буртиком, установлен с возмож1юстъю возвратно-поступательного перемещения в пазу шатуна и имеет глухое отверстие для размещения пружины сжатия.. Кроме того, каждый из ползунов шар нирно установлен в пазу шатуна Иосредством оси и имеет глухое отверстие доя размещения пружины сжатия. Причем рычаг выполнен двуплечим, одно плечо которого соединено с механн мок; управления движения игл, а другое с КЛЕНОВЫМ фиксатором, при этом плечи риьгаага соединены между собой подпружиненной Т51ГОЙ, установленной с возмож ностью возвратно-поступательного перемещения. На фиг. 1 представлена схема привода ремизки в положении нижнего зева; на фго 2 - то же, в положении верхнег эева; на (}даг. 3 - клиновое соединение, вид сбоку; на фиг. 4 - разрез А-А на ф.гаг. Зц Hia фиг, 5. - разрез Б-Б на фиг. 3; на фиг. 6 - разрез В-В на фиг. 3; на фиг. 7 - вариант исп гаения кшшсмвого соединения, по фиг. 3| на фиг. 8 « разрез Г-Г на фиг. 7; на фиг. 9 12 - схема управления клиновым соединением для передвижения ремизки из . положения нижнего зева в положение . верхнего зева И обратно. Ротационная ремизоподъемная каретка содер)кит ремизку 1, перемещающуюс ИЗ положения нижнего зева в положение верхнего зева (фиг. 2) через систе«1у рычагов 2 шатуном 3, размещенным в эксцентриковой обойме 4. Эксцентриковая обойма 4 посредством клинового фиксатора 5 соединена с приводным ва лом 6, имекшшм диаметрально расположен йые клиновые выемки 7. Связанная с приводным валом 6 посредством клинового фиксатора 5 эксцентриковая обой ма 4 перемещает шатун 3 за полуоборот на. расстояние 5 из положения нижнего зева в положение верхнего эева и обрат но. Клиновой фиксатор 5 имеет открытую в осевом направлении радиальную выемк 8, в которую входит соединительный элемент 9, закрепленный на концах двуяпечих рычагов 10 и 11. Вход и выход радиальной выемки 8 в клиновом 4й1ксаторе 5 имеют наклонные поверхности 12, а соединительный элемент 9 имеет кулачковые поверхности 13, чтобы обеспечить набегание и сбегание кяинового фиксатора 5 без помех. Клиновой фиксатор 5 имеет буртик 14, вход$шшй в выемку 15 эксцентриковой обоймы 4, и глухое отверстие 16, в которое вставлена пружина 17 оштия. Под действием пружины 17 сжатия клийэвой фиксатор 5 перемещается в клиновой выемке 7 приводного вала и входит в нее во время его вращения. I После .прохождения зоны зацепления клиновой фиксатор 5 посредством соединительного элемента 9 вытягивается -из клиновой выемки 7 приводного вала 6 в направлении, противоположном действию пружины 17, и, таким образом, соединение размыкается. Введение клинового фиксатора 5 в клиновую выемку 7 приводного вала 6 происходит благодаря обратному ходу соединительного элемента 9 и пружине 17 сжатия. Клиновой фиксатор 5 (фиг. 3-6) в своем разомкнутом положении фиксирован между стогпэрящими ползунакш 18 и 19. Каждый стопорящий ползун 18 и 19 установлен в выемке 20 шатуна 3 И имеет в буртике 21 глухое отверстие 22 для пружины 23 сжатия. Направление движения Р стопсряпсих ползунов 18 и 19 образует с направлением соединения клинового фиксатора 5 угол oL около 25. Каждый стопорящий ползун 18 и 19 на своей выступающей над поверхностью плеча шатуна 3 верхней стороне имеет поверхность 24 восходящего скольжения, которая образует с направлением соединения клинового фиксатора 5 угол )Ь , равный примерно lOi. КЛшювой фиксатор5 (фиг. 7 и 8) фиксирован между двумя стопорящими ползунами 25 и 26, которые расположены на закрепленных на шатуне осях 27 и могут поворачиваться в направлении, противоположном действию пружины 28 сжатия. Стопорящие ползуны 25 и 26 тоже имеют поверхности 29 восходящего скольжения, которые образуют с направлением замыкания клиновогхэ ({иксатора 5 такой же угол р и также отклоняются в направлешш движения Р. Боковые стенки стопоряоцих ползунов 18, 19 и 25, 26, обращенные к клиновсииу фиксатору 5, наклонены и установпены друг к другу под углом 30 . Благодаря этому фиксирующий клин 5 всегда факсйр5 -ется в одном и том же разомкнутом положении. . Рычаги 10 и 11 установлены с возможностью поворота на неподвижных осях 30 и 31 и своими внешними концами через подшипнтш 32 скольжения соеданены с тягой 33 управления, которая связана с горизонтальным рычагом 34. На рычаге 34 шарнирно закреплены два крючка 35, связанные со щупальной иглой 36, которая ошупывает перфокарту (не показана), переметаемую шппшдром 37. Отверстие в перфокарте означает, что игла 36 запала и крючки 35 перешли на траекторию движения ножей 38. Тяга 33 управления посредством пружины 39, опирающейся на подшипник 40 и кулачок 41, возвращается в исходное положение. G обеих сторон подшипника 32 скольнения для обоих рычагов 10 и 11 на тяге управления установлены кулачки 42 - 45 между промежуточным положением пружин 46 и 47 сжатия чтобы результат считывания перфокарты перенести на соединительный узел клинового (фиксатора 5. Горизонтальный рычаг взаимодействует с двумя опорами 48 и 49. Щупальные иглы 36 (фиг. 9) в положении нидиего зева фиксируют отверстие на перфокарте, при этом крючки 35 поднимают горизонтальный рычаг 34 с его опоры 48 в результате поворачивают ры чаг 10 так, что клиновой фиксатор 5 входит в приводной вал 6. Вслед за эти соответствующая ремизка 1 перемещаетс из положения нижнего зева в положение верхнего зева. В положении верхнего зева (фиг. 1О) действует отверстие в перфокарте, так что клиновой фиксатор 5 размыкает соединение и посредством рычага 11 зажимается в своем положении стопорения. Соответствующая ремизка 1 остается в верхнем зеве. В положении верхнего зева (фиг. 11) Щупальные иглы 36 не фиксяфуют отверс тия в перфокарте. Оба крючка 35 находятся вне зоны действия ножа 38, так что горизонтальный рычаг 34 прилегает к опорам 48 и 49, благнэдаря чему рычаг 11 снова вводит клиновой -фиксатор 5 в приводной вал 6. Тогда соответству ющая ремизка 1 перемещается из верхне го зева в нижний. В положении нижнего зева (фиг. 12) обе Щупальные иглы 36 снова не фиксИтруют отверстия в перфокарте, так что все остается в ранее описаннсм положении и благодаря этому клиновой фиксатор 5 размъпсается посредством рычага 10 и зажимается в свое положение стопорения. Соответствующая ремизка 1 остается при своем заключительном рабочем ходе в нижнем зеве. 1 Формула изобретения 1.Ротационная ремизоподъемная каретка, содержащая механизм управления движением игл, связанный с рычагом, установленным с. возможностью взаимодействия с шатуном, один конец которого соединен с ремизками, а другой - со свободно сидящей на валу, имеющем диа- . метрально расположенные клиновые выемки, эксцентриковой обоймой, установленной с возможностью сцепления с привод ным валом посредством клинового фиксатора, конец которого, обращенный к валу, размещен в радиальной выемке обоймы, отличающаяся тем, что, с целью повьш1ения надежности в работе, сна имеет подпружиненные ползуны для стопорения клинового фиксатора, симметрично установленные относительно оси шатуна, прйя этом щатун тлеет пазы для размещения ползунов, а клиновой фиксатор вьшолзяен пощтружиненным. 2.Каретка по п. 1, о т л и ч а ю щ а я с я тем, что каждые из ползунов расположены относительно клинового фиксатора так, что угол между плоскостями их симметрвЕШ составляет угол 3 + 95 , предпочтительно 25. 3.Каретка по пп. 1и 2, отличающаяся тем, тто между сторонами ползунов, обращенных к клиновому фиксатору, имеется тупой угол 8О + + 17О°, предпочтительно 1О1. 4.Каретка по пп. 1-3, отличающаяся тем, чгго конец клиново го фиксатора, контактирующий с ползунами, имеет скосы, образующие между собой угол У 10 + 50, предпочтительно 30. 5.Каретка по пп. 1-4, отличающаяся тем, тто каждый из ползунов вьшопнен с буртиком, установлен с возможностью возвратно-постувательнсяч) перемещения в пазу шатуна и имеет глухое отверстие для размещения пружины сявтяя. 6.Каретка по пп. 1-4, о т л и чаюшаяся тем, что каждый из ползунов шарнирно установлен в пазу шатуна посредством оси и имеет глухое отверстие для размещения пружины сжатая, 7.Каретка по ЯП. 1-6, отличающаяся тем, что рычаг выполнен двуплечим, одио плечо которого соединено с механизмом управлензая двияет 6 78 ния игл, а другое - с клиновым фиксаторам, при этся плечи рычага соединены между собой подпружиненной тягой, установленной с возможностью возвратнопос;гу11ательнсго перемещения. Источники информации, принятые во внимание при экспертизе 1, Заявка ФРГ № 2036643, кл. 86В 2, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1109055A3 |
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1009280A3 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА | 1973 |
|
SU374845A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА | 1973 |
|
SU396028A1 |
| Привод ремиз к ткацкому станку | 1975 |
|
SU644395A3 |
| ПРИВОД РЕМИЗ К ТКАЦКОМУ СТАНКУ | 1973 |
|
SU398049A1 |
| Ротационная ремизоподъемная каретка ткацкого станка | 1979 |
|
SU978736A3 |
| Ротационная ремизоподъемная каретка ткацкого станка | 1981 |
|
SU1114345A3 |
| Ремизоподъемная каретка для ткацкого станка | 1981 |
|
SU1068041A3 |
| Ремизоподъемная каретка ткацкого станка | 1986 |
|
SU1331920A1 |
Рш.2
А
AlA 15 / 5 /7 /
Фиг 3
-/б
22
23
9иг. 5
В-в
22
г.6
25
г-г
26
27
S 8 г 9
ш
Vu2. W
36
J7
. 11
