(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Схват промышленного робота | 1985 |
|
SU1310204A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Устройство для подачи заготовок в зону обработки | 1977 |
|
SU670361A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захват | 1977 |
|
SU663577A1 |
| Станок для обработки заготовок ручек ножей | 1985 |
|
SU1308476A1 |
| Устройство к штампу для подачи длинномерных заготовок | 1982 |
|
SU1080906A1 |
| Захват промышленного робота | 1985 |
|
SU1313705A1 |
| Машина для сварки дугой, вращающейся в магнитном поле | 1988 |
|
SU1712090A1 |

1
Изобретение относится к машиностроению, в частности к конструкциям манипуляторов, и может быть использовано для автоматизации технологического оборудования термообработки.
Известен захват, содержащий корпус с зажимным рычажным механизмом и сжобу, связанную со штоками силовых цилиндров. При перемещении штоков проиоходит разведение или смыкание губокю
зажимного механизма 1.
Однако известный захват не может обеспечить одновременного надежного зажатия нескольких заготовок с различными линейными размерами.is
Цель изобретения - повышен 1е надежности работы при одновременном зажатии нескольких заготовок с различными линейными размерами.. 20
Указанная цель достигается тем, что в захвате скоба выполнена из двух шарнирно соединенных частей, на которых выполнены фигурные пазы, причем в каждом
фигурном пазу шарнирно установлены рычаги зажимного механизма.
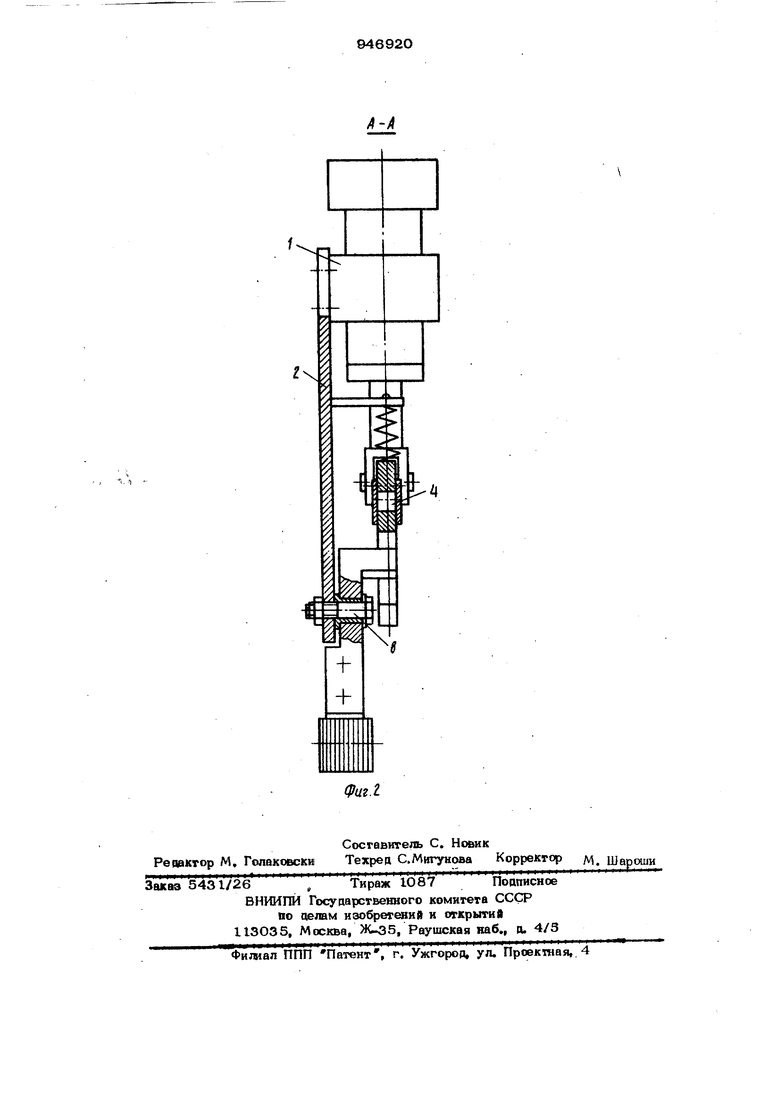
На фиг. 1 изображен захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Захват содержит приводные цндцндры 1, установленные на корпусе 2, скобу 3, выполненную из двух частей, соединенных шарниром 4. Каждая часть скобы 3 закреплена шарнирно на одном из штоков 5 цилиндров 1 и может быть связана пружиной 6 с корпусом 2. На подвижной скобе 3 выполнены, например, три фигурные паза.
Зажимной рычажный механизм содернсит двуплечие рычаги 7, которые расположены парами в фигурных пазах скобы и закреплены на корпусе 2 на осях 8. Рычаги 7 могут быть выполнены регулируемыми по длине. Торец одного плеча рычага 7 выполнен со скругленной поверхностью 5, центр которой смешен относительно оси 8. На другом плече смонтированы зажимные губки 9, которые могут быть выполнены самоусгаиовливпющи- мисл н 11ош 11 тк1;и( относительно ры мщ-оп 7 пружмчами J. О. Г пссюяиие между осями симметрии днух соседних фигу|1иых пазов скобы 3 делится штоком о п отношении 3, т. е. точка приложения усилия удал&на от оси симметрии захвата в 2,5 3 раза Дальше, чем от оси симметрии крайнего эажим юго органа. Захват работает следующим образом. Штоки 5 цилиндров 1 перемешают скобу 3 п направлении рычагов 7. Пру жины 6 при этом растягиваются. Скоба леремешаясь, воздействует плоскостями В фигурных пазов на поверхности Б двуплечих рычагов 7, которые поворпчивают ся на осях 8 и сжимают зажимные губки О для полного зажатия всех заготовок. Шарнирное соединение 4 при этом перем шается вдоль оси захвата. Пружины 10 регулируют усилие и положение губок 9 при наличии на заготовках овал ностей, 1ЮПЛЫВОВ, заусенцев и т. п. В первую очередь рычаги 7 захватывают тубками 9 заготовку наибольшего диаметра. Если эта заготовка захвачена рычагами, расположенными в среднем паоу скоГ)ы 3, то крайние пары рычагов 7 продолжают сжимать губки 9, так .как под воздействием штоков 5 обе части скобы поворачиваются на шарнире 4. При этом концы скобы перемешаются в сторону ры чагог 7 до полного зажатия остальных заготовок, шарнирное соединение 4 перемеишвтсй вдбль оси захвата в сторону iiiiлиняров, а выступы среднего паза плос-костями В скользят по закругленным п вертсностям Б торцов рычагов 7, сохраняя усилие зажима. При обратном переметении штоков 5 скоба 3 воздействует выступами Г на рычаги 7, поворачивая их на оси 8. Вследствие этого рычаги 7 раздвигают губки 9 и освобождают заготовки. Предлагаемая конструкшш захвата обеспечивает надежный многопоаипионный зажим заготовок как с малым, так и с широкими полями допусков с необработанной поверхностью, таких, как литье и прокат, а также передачу их на последующую за термообработкой операцию. Формула изобретения Захват, содержащий корпус с зажимным рычажным механизмом и скобу, связанную со штоками силовых цилиндров, отличающийся тем, что, с целью повышения надежности работы при одновременном зажатии нескольких заготовок с ра-зличиыми линейными размерами, скоба выполнена из двух шарнирно соединенных частей, на которых выполнены фигурные пазы, причем в каждом фигурном пазу шариирно установлены рычаги зажимного механизма. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР° № 623734, кл. В 25 J 15/00, 1978.
