Изобретение относится к машиностроению, а именно к робототехнике и предназначено для транспортировки заготовок плоской формы.
Цель изобретения - упрощение кон- струкции за счет выполнения кинематической связи взаимно перемещающихся захватных рычагов в виде кулисно-ры- чажного механизма.
На фиг,1 изображен схват, общий вид на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б фиг.1 (сопряжение поверхностей направляющих корпуса и захватных рычагов)j на фиг.4 - использование захватных губок для захвата деталей за отверстие; на фиг.З - использование захватных губок в качестве направляющих для установки съемных пневматических захватных губок; на фиг.6 - использование зах- ватных губок в качестве направляющих для установки съемных губок, расширяющих диапазон размеров захватываемых заготовок.
Схват состоит из корпуса 1, жестко связанного с крышкой 2 привода линейного перемещения, например пневмоци- линдра одностороннего действия, имеющего поршень 3 со штоком 4, возвратную пружину 5. Один захватный рычаг 6, несущий зажимную губку 7, жестко связан со штоком 4 привода линейного перемещения, например, резьбовым соединением, и расположен с возможностью перемещения в направляющих второго захватного рычага 8, несущего зажимную губку 9 и расположенного, в свою очередь, с возможностью перемещения
в соответствующих направлякщих корпу,
са 1.
Захватные рычаги 6 и 8 кинематичеки связаны между собой кулисно-рычаж ным механизмом, включающим двуплечий рычаг 10,шарнирно установленный посредством осей 11 на корпусе 1. На концах двуплечего рычага 10 выполнены пазы 12 и 13. В последних имеют возможность перемещаться штыри 14 и 15, установленные на ушках 16 и 17 захватных рычагов 6 и 8.
Схват работает следующим образом.
При подаче давления в силовой цилиндр поршень 3 перемещается вместе со штоком 4 и жестко закрепленным на
нем захватным рычагом 6, Последний
5
0
5
0
5
0
5
воздействует на двуплечий рычаг 10 посредством штыря 14 и ушка 16 и поворачивает его вокруг оси 11. Посредством штыря 15 и ушка 17 двуплечий рычаг 10 воздействует на захватный рычаг 8 и перемещает его в направлении, обратном направлению перемещения захватного рычага 6, до захвата заготовки.
Разведение зажимных губок 7 и 9 в исходное положение происходит под воздействием пружины 5 силового ци- . линдра одностороннего действия.
Высоту зажимных губок 7 и 9 целесообразно выбрать равной 2/3 наименьшей толщины заготовки, чем обеспечивается захват только одной заготовки из стопы. Равные плечи двуплечего рычага 10 обеспечивают синхронность движения захватных губок.
Наружные стороны губок используются при захвате заготовок за стенки отверстий в деталях (фиг.4). В этом случае захват заготовок дроизводится в положении губок Сжато, а удержание обеспечивается остаточным сжатием пружины 5 после снятия давления в силовом цилиндре.
Предлагаемая конструкция губок обеспечивает возможность быстрой установки или смены съемных зажимных губок другого типа (фиг.З и 6).
Формула изобретения
Схват промьшшенного робота, содержащий захватные рычаги, несущие сменные .зажимные губки, первый из которых жестко связан со штоком привода линейного перемещения и кинематически связан с вторым захватным рычагом, отличающийся тем, что, с целью упрощения конструкции, кинема- тическая связь захватных рычагов выполнена в виде кулисно-рычажного механизма, включающего двуплечий рычаг, шарнирно установленный на корпусе, на концах указанного двуплечего рычага выполнены пазы, в которых установ лены штыри захватных рычагов, причем первый захватный рычаг установлен с возможностью перемещения в направляющих, выполненных в теле второго захватного рычага, а второй - в соответствующих направляющих корпуса.
фиэ.2
ff ff
ejCftfe.3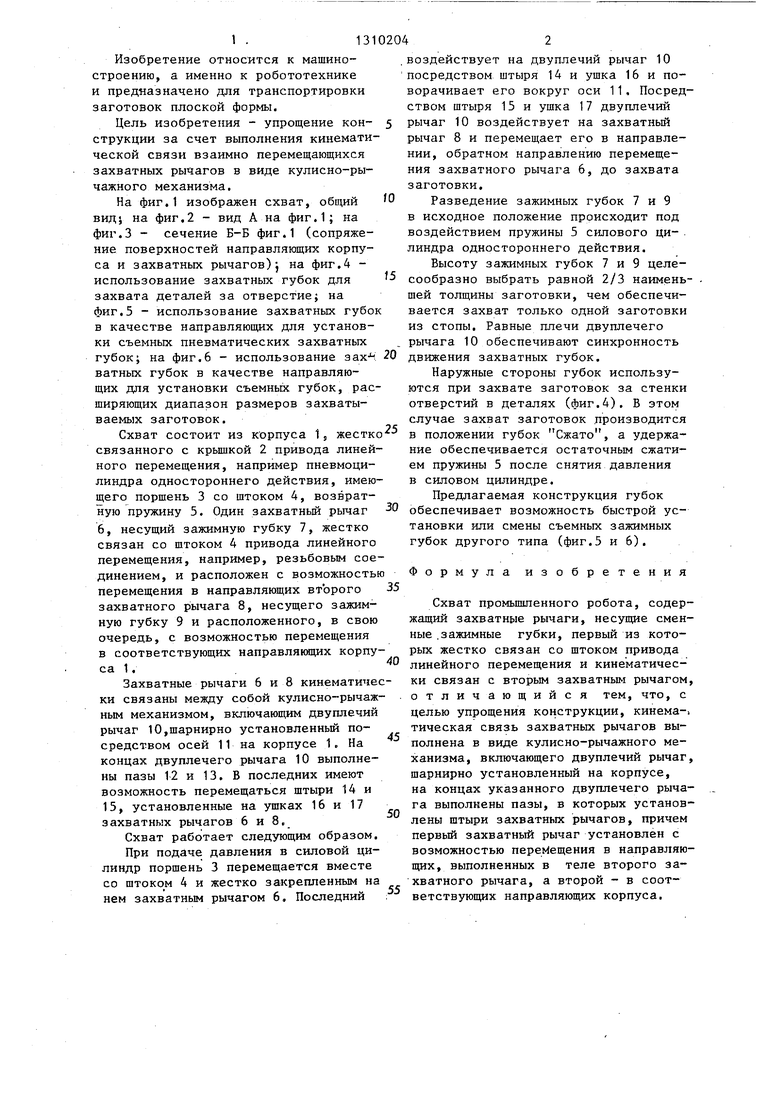
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Захват манипулятора | 1986 |
|
SU1323375A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Схват робота | 1985 |
|
SU1294604A1 |
| Схват | 1986 |
|
SU1335450A1 |

Изобретение относится к машиностроению, а именно к робототехнике, предназначено для транспортировки заготовок плоской формы и позволяет упростить конструкцию за счет выполнения кинематической связи взаимно перемещающихся захватных рычагов в виде кулисно-рычажного механизма. При включении привода линейного перемещения шток 4 перемещается вместе с жестко закрепленным на нем захватным рычагом 6,которьм воздействует на одно из плеч двуплечего рычага 10 посредством штыря 14 и ушка 16. Далее движение передается с другого плеча двуплечего рычага 10 посредством штыря 15 и ушка 17 на захватньй рычаг 8, перемещающийся в направлении, обратном направлению перемещения захватного рычага 6, до захвата заготовки. Причем захватный рычаг 6 перемещается в направляющих, выполненных в теле захватного рычага 8, а захватный рычаг 8 - в соответствующих направляющих корпуса 1. 6 ил. i (Л /5 со CfJu3,l
фие.
.5Редактор И. Касарда
Составитель Т. Пинчук
Техред И.Попович Корректор Г. Решетник
Заказ 1854/14Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная,4
фиг. f
| Схват промышленного робота | 1977 |
|
SU638462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
