I /
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации производстЬенных процессов.
Известен захват манипулятора, предназначенного для механизации и автоматизации производственных процессов, содержащий привод линейного перемещения, на штоке которого закреплён клин р..
Этот захват не к4ожет захватывать Ш1инномериые детали.
Наиболее близок к изобретению захват, содержащий зажимные Губки, связанные передаточными механизмами с корпусом и с приводом линейного перемещения, например силовым цилиндром, на штоке которого закреплен клин, а иа передаточных механизмах губок расположены ролики 2.
Известный захват ие позволяет захва тывать длинномерные детали и сложен по конструкции.
Цель изобретения - упрощение KOHCtw рукшга и расширение технологических возможностей путем обеспечения захватывания длинномерных деталей.
Для этого в предлагаемом захвате пе редаточный механизм каждой губки выпол нен в -виде пантографа и снабжен кулисой с пазом; подпружиненной относительно корпуса, ось одного из шарниров этого пантографа смонтирована на корпусе, а ось ро/циса передаточного механизма установлена в пазу кулисы и подпружинена в сторону клина, при этом эти оси и ось губ-., ки расположены в одной плоскости.
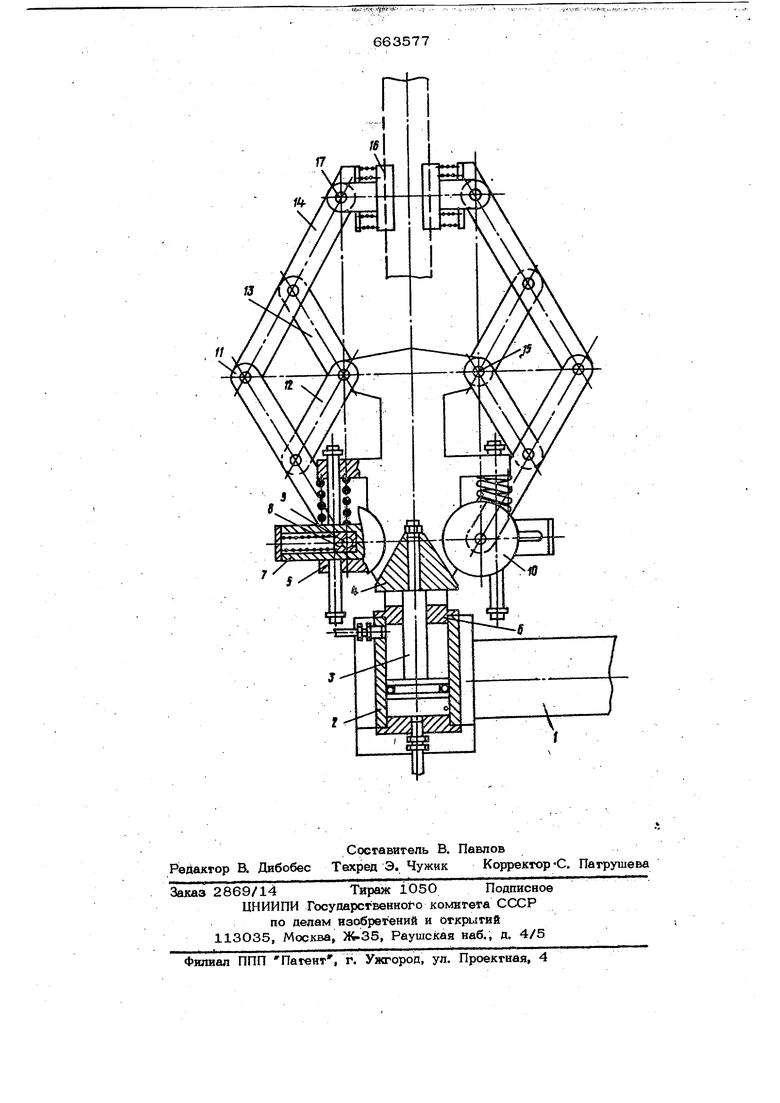
На чертеже изображен я1ись1ваемый захват, общий вид.
В нижней части корпуса 1 захвата установлен силовой цилиндр, например гидроцилинйр 2,на внешней части штока 3 цилиндра закреплен клин 4 В верхней части 5 KO{xiyca зах:вата, жестко зафиксированной на крышке 6 гидроцилиндра, размещены подвижные относительно части 5 корпуса и соосные с гидроцилиндром 2 подпружиненные куписы 7, в которые вставлены сухари 8, поджимаемые в направлетш оси руки. В сухарях 8 смонтированы оси 9 роликов 10, находящихся на концах рычагов 11 пантографа, сосгояшего из рычагов 12, 13 и 14 шарнирно связанных между собой. Усилия поджагия сухарей 8и кулис 7 гаковы, чго продольные перемещения кулис 7 при воздействии клина 4 на ролики 10 возможны только после запирания сухарей 8 в кулисах 7. Рычаги 12 и 13 связаны с частью 5 корпуса осью 15. На рычагах 14 шарнирно установлены зажимные губки 16 с осями 17, нахошпцимися на одной прямой с осями 9 и 15. Захват работает следующим образом. Под действием силового цилиндра шток 3 наезжает клином 4 на ролики ДО и раздвигает их. При этом сухари8 перемешаются вдоль кулис 7, а сами кулисы 7 остаются неподвижными. В связи с тем что оси 9, 15 и 17 распольжейы на одной прямой, ось 17 смещается по пря°мой, параллельной траектории движения осей 9 роликов 1О, но в противоположном направлении, сближая губки 16. При зажатии детали губками 16 сухари 8 теряют возможность дальнейшего перемеш& ния в кулисах 7, и увеличившаяся продол ная составляющая усилия клина 4 на ролики 10 вызывает смешение кулис 7, а следовательно, и расположенных в них осей 9 роликов 1О относительно корпуса 5 по Прямым, параллельным оси корпуса 1. При этом благодари тому, что оси 9, 15 и 17 находятся на одной прямой, так же по прямой, параллельной оси корпуса 1, но в противоположном направлении, пе ремешаются на осях 17 губки 16 сразу при зажатии ими детали. „ Таким образом, при сигнале включения захвата и при выдвижении штока 3 губки 16 сначала зажимают деталь, а потом перемешают ее по прямолинейной траектории в направлении оси части 5 корпуса, выжимая ее из -зажимного . ройства, например, из патрона токарного станка. Далее деталь может быть выйесена из рабочей зоны станка любым движением манипулятора. Когда заготовку нужно вставить в патрон, губки, удерживающие ее, при смещении штока в цилиндр сначала передвигаются вперед по прямой линии до тех пор, пока кулисы 7 не упрутся под действием пружин в стенки корпуса. При дальнейшем движении штока 3 губки 16 раскрываЮтся, оставляя деталь в патроне. Захват убирается из рабочей зоны станка поворотом или подьемом руки. Прямолинейное перемещение губок при захвате объекта дает возможность удерживать как заготовку, так и деталь, которые могут значительно отличаться одна от другой по размерам. Формула изобретения Захват манипулятора, содержащий зажимные губки, связанные Передаточными механизмами с Корпусом и с приводом линейного перемещения, например силовым цилиндром, на штоке которого закреплен клин, а на передаточных механизмах губок расположены ролики отличающийся тем, что, с целью упрощения конструкции и расширения технологичеоких возможностей путем обеспечения захватывания длинномерных деталей, передаточный механизм каждой губки выполнен в виде гантографа и снабжен кулисой с пазом, подпружиненной относительно корпуса; ось одноГО из шарниров этого панто рафа смонтирована на корпусе, а ось ролика передаточного механизма устано&дена в пазу кулиСы и подпружинена в сторону клина, при этом эти оси и ось губки расположены в одной плоскости. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР. № 187485, кл. В 23 Q 7/04,1963. 2.Авторское свидетельство СССР № 568542, кл. В 25 Т 15/ОО, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1977 |
|
SU667396A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Захват манипулятора | 1979 |
|
SU837859A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |