Изобретение относится к области автоматического управления металлорежущими станками.
Известен привод подачи суппорта токарного станка, содержащий распределительный вал с установленным на нем сменным кулачком, приводим 11й в движение многозвенный рычажный механизм подачи, одно конечное звено которого посредством копирного пальца упирается в профиль кулачка, а другое посредством микрометрического регулировочного винта - в подпружиненный ползун суппорта 1.
Недостатком известного привода подачи является сложность кинематической цепи и отсутствие числового программного управления подачей, oiраничивающее возможности использования станков продольного точения в мелкосерийном и серийном производстве .
Наиболее близким по технической сущности к данному изобретению является привод суппорта станка с числовым программны / управлением, содержащий цепь привода рабочей подачи с шаговым электроприводом, в котор -ю входят шаговый двигатель, чррвячная пара, вал, кулачок, тoлкaтeл с роликом и цепь привода быстрых перемещений, содержащая гидроцилиндр со штоком, тормозной золотник с плунжером, ролик и кулачок 2.
Однако наличие в составе известного привода элементов гидравлик, наряду с его сложностью и стоимостью, вносит в него ряд других недостатков,
Q присущих гидравлическим системам, которые усиливаются с увеличением числа суппортов станка. Кроме того, в известном приводе существенно влияние погрешности выполнения звеньев его кинематической цепи на точность пола15
чи суппорта.
Целью изобретения является упрощение конструкции привода, уменыиение чисда используемых в нем элементов,
20 габаритов и повышение точности работы.
Эта цель достигается тем, что в приводе суппортов и балансира токарного станка гайка качения выполнена
25 в виде программно-управляемого упора, а кулачок - в виде рычага с удленонным плечом, упирающегося посредством ролика в упор, при этом двигатель подачи суппорта или балансира и упор
30 установлены на введенных р уч-тройстно
салазках, перемещаемых от привола подачи .
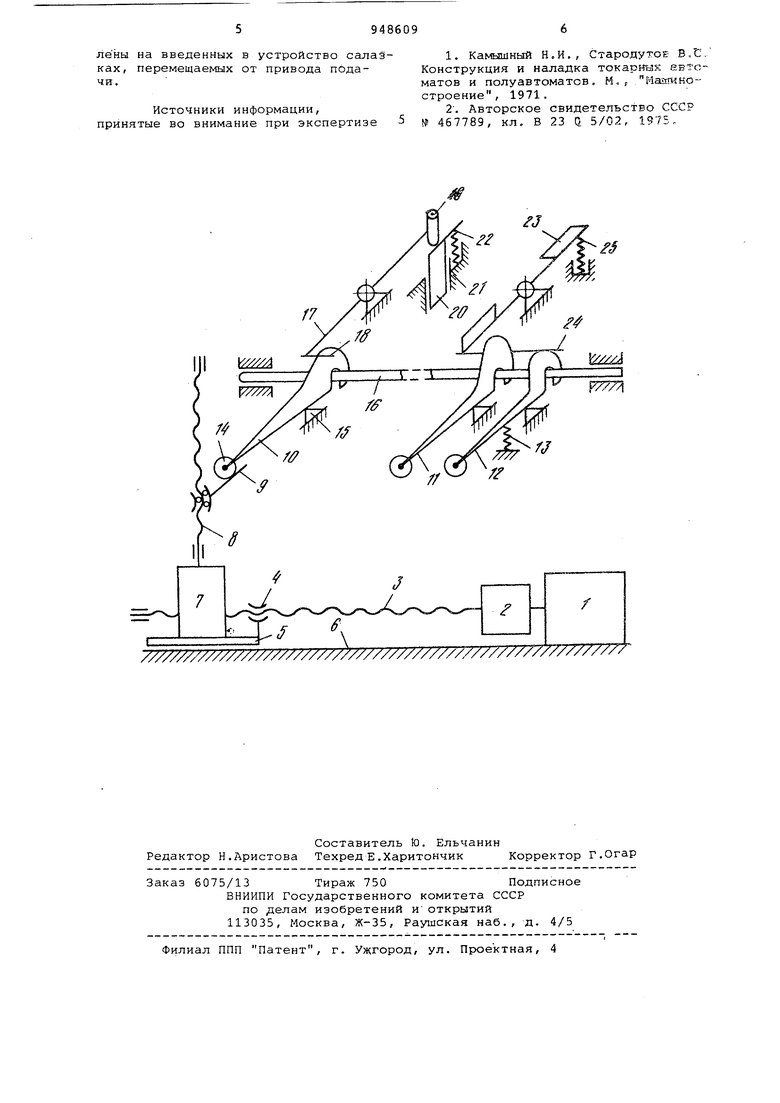
На чертеже показана кинематическа схема привода суппортов и балансира токарного стайка.
Привод подачи суппортов и балансира токарного станка продольногр точения содержит двигатель 1, вал которого через редуктор 2, ходовой винт 3 и гайку 4 связан с салазками 5, установленными на направляю 4их б; двигатель 7, установленный на салазках 5, вал которого соединен с ходовым винтом 9, выполненной в виде программноуправляемого упора; кулачковые рычаги 10, 11 и 12 с пружиной воэгзрата 13 (каждглй с роликом 14 ма. конце удлиненного плеча), о1 1- ра1Мие(:я на 15 и устаковленньле па палу 1о с возможностью гюворота вокруг него; рычаг подачи 17 с устайонлеирк-лми на концах его плеч копирным пальцем 18 и микрометрическим регулировочным винтом 19, упирающимися соответствеЕ но в рабочий профиль рычага 10 и в ползун 20 суппорта , установленный на направляющих корпуса 21, и пружину возврата 22 суппорта. Одно из плеч балансира 23 посредством копирного пальца 24 усилием пружины 25 упирается в рабочие профили двух рычагов 11 и 12, первый из которых служит для подачи одного плеча балансира с инструментом, а второй - др гого плеча балансира. Для этого рабочие профили этих рычагов выполнены так, что при повороте вокруг вала ры1ага 11 происходит подъем плеча балансира, а рычага 12 - опускание плеча балансира.
В нейтральном положении, когда оба плеча балансира с инструментами отведены от обрабатываемой детали, балансир удерживается верхней .(нейтральной) зоной рабочего профиля рычага 12, который приводится в это положение пружиной возврата 13,
3 данном приводе выполнен;го кулачка в виде рычага с удлиненным плечом позволяет уменьшить погрешности изготовления ifH-нематической цепи привода на точност перемещения суппортов и балансира за счет удлинения плеча рычага, а выполнение гайки качения 9 в виде программно-управляемого упора за счет выборки зазоров в кинематической цепи.
Кинематическая цепь привода одинакова для всех суппортов станка.
Работа привода суппортов и балансира осуществляется следующим образом.
В исходное положение с помощьк двигателя 7 и ходового вкнта 8 гайка 9 на бьгстром ходу возвращена в крайнее положение так, что она находится от рошка 14 на заданном
расстоянии. Гши этом ползун 20 суппортл вместе с упирающимся н него плечам рычага подачи 17 пружины возврата 22 отведен в крайнее Bepxi-iee положение, а рычаг 10 с роликс м 14 под действием собственного веса копирного пальца 18 рычага подачи 17 упирается в опору 15 и находится в нулевом положении.
дртя быстрого подвода и рабочей подачи ползуна 20. суппорта на заданЕюе расстоя ие и оста-юва его :;вигалового программного упргозления i на чертеже не показано) посредством ходового В -;нта 8 переме дает прО1раммноупранлксмый упор - 1айку 9,котог ;1я р;;-;аг 10 с тх;.г;и:с;:-: .i ; , подаП 1 7 с .ц:.1м 1 В и pe;yл ipcJ;:;c чllым микрсг.1С:трич1;С -л1;.: пн,;том 19 С1су;г;с;с вл;1е7 попп-у птшуна 20 )рга с заданнс и ripor;ja:.;;.:r;H
СКОРОС:ГЬ:1; /;О НУЖНОГО ГО.ЧОЖСМ-1ИЯ .
Подача ползуна 20 суппорта ь оОра.TLiuM па;:ра:-;лении О(;,::;с ст п;1яс;тся пружиной иозарата 22. .Для 11олачи г.юС)ого л;ру1-опо cynnopT-i или nj:ci Ga;;aiiсира с HUCTpyNrGfjioivi са.лг1зки 5 с устаi O;U eni :JMn па НИХ двигатолом 7 с : одовкм DHHTOFvi 8 и гайкой 9 посредстЕо двигателя 1, редуктора 2, хсдокого винта 3 с гайкой 4 .ча перемещаются ка быстром ходу noj; рс.пил рычаг л 3aj:;a irjorc) программен cynnoora или балансира. Затем осу1;естг;ляется собствен1 о подача выбравлюго по лрогрсамме суппорта или бал апсира .
Блг годаря -наличию npciaja:..i;-;C-ynравляемого упора и рычага :: yj;;ui:--:e:-jным плечом умень ;:аетс;я илиннио погрешности изгоговления звенл ев кинематической цепи на вихольгун; точность , а устаноЕСа двигателя nozian i-ia салазках позволяет уменыиать ко;л- чество д}зигагелеп и упростить коне ; i3yки. .
Привод суппортов
ба;1анаира тсжа::;ий двигатель карнсго fjTaHica, содер подачи сул;порта и бал afiCHpa ,, роединенный с его викт ч гайку качения Подач;-; суппорта ; oziHO плечо
. ОДПрУЖИНеНН:;1;Й которого упирается в ползун суппорта, кула
чок, установленный на .оалу, )эабочий
ЛрЭГрИ.ЛЬ КОТОрОго взаимоддействует с (:1ТОрЫ,М Г;ЛеЧОМ
а и.гщ бал1ансира ры ч а Г а п о дачи суп п о р т о т л и ч а ю щ и и с
я тем, что, с nejUiio упрО:;1ения кон г: т р у i с ц и и п р и в о йбари-soif, гайда ц. уменьшения его ;; ка каче;1ия Б1з.ч1Олнена 3 виде прсгтраммно-управляемого упор а, а кулачок в виде рычага с у,длин енным плелом, упи р го с я по ере дс т Г: ом оолика в упор, при э-том двигат порта или балатсира и
лены на введенных в устройство салазках, перемещаемых от привода подачи.
Источники информации, принятые во внимание при экспертизе
1, Камьипный Н.И., СтародутоЕ B.C. Конструкция и наладка токарных автоматов и полуавтоматов, М., Мааткостроение, 1971.
2. Авторское свидетельство СССР № 467789, кл. В 23 Q. 5/02, 1975,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ РЕЗЬБЫ | 1973 |
|
SU388843A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ПОРШНЕВЫХ КОЛЕЦ | 1973 |
|
SU397269A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Станок для шлифования рабочей поверхности прокатных валков | 1980 |
|
SU933394A1 |
| Токарный станок | 1981 |
|
SU1026970A2 |
| •СЕСОЮЗНАЯ ffATEHTW-TEXl'i-'JECHAH | 1973 |
|
SU381480A1 |
| Устройство для автоматического выключения подач суппорта токарно-винторезного станка | 1980 |
|
SU1060416A1 |
//////////////////7/7////////////////////////////
/J
//
//
