(54) УСТРОЙСТВО ДЛЯ КАНТОВАНИЯ ГРУЗОВ НА РОЛИКОВОМ КОНВЕЙЕРЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Устройство для кантования грузов на роликовом конвейере | 1983 |
|
SU1159854A1 |
| Захват-кантователь | 1990 |
|
SU1805092A1 |
| Устройство для снятия и кантования изделий с малой вертикальной устойчивостью с движущегося подвесного конвейера | 1980 |
|
SU906853A1 |
| Устройство для укладки штучных предметов в тару | 1977 |
|
SU738948A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Устройство для кантования листового материала на роликовом конвейере | 1983 |
|
SU1210917A1 |
| Захват для бортового камня | 1990 |
|
SU1737112A1 |
| Кантователь щитовых деталей | 1975 |
|
SU606782A1 |
| Устройство для кантования длинномерных грузов | 1972 |
|
SU470324A1 |
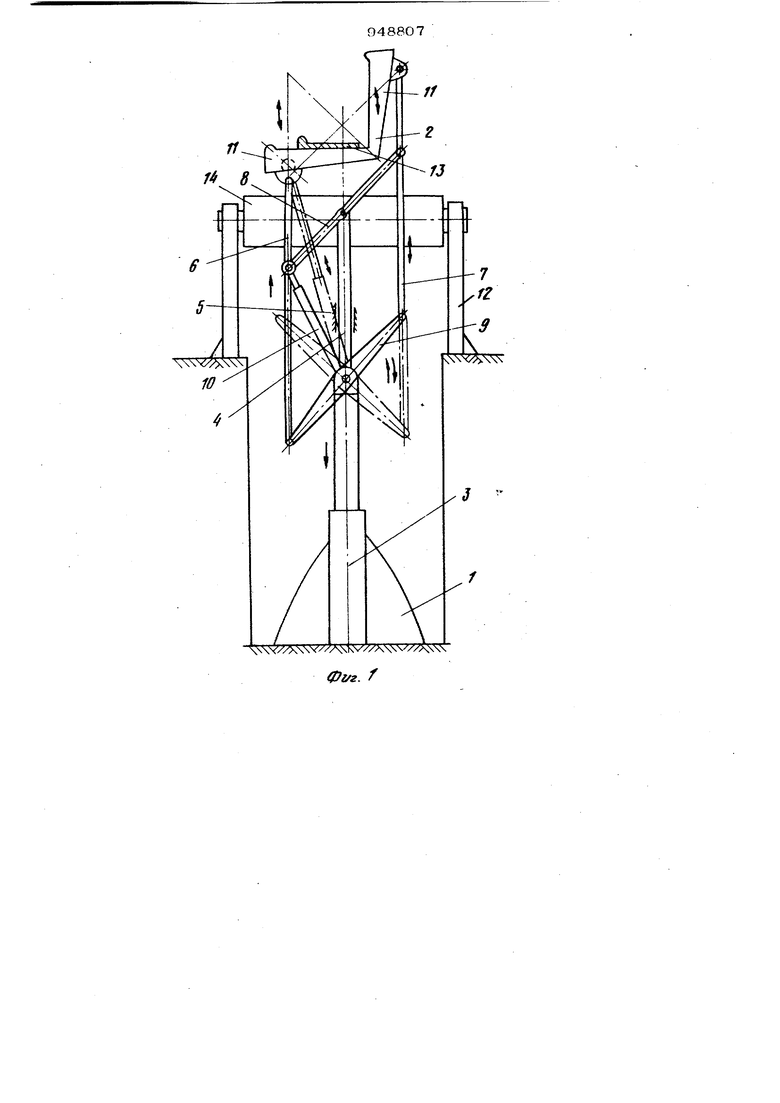


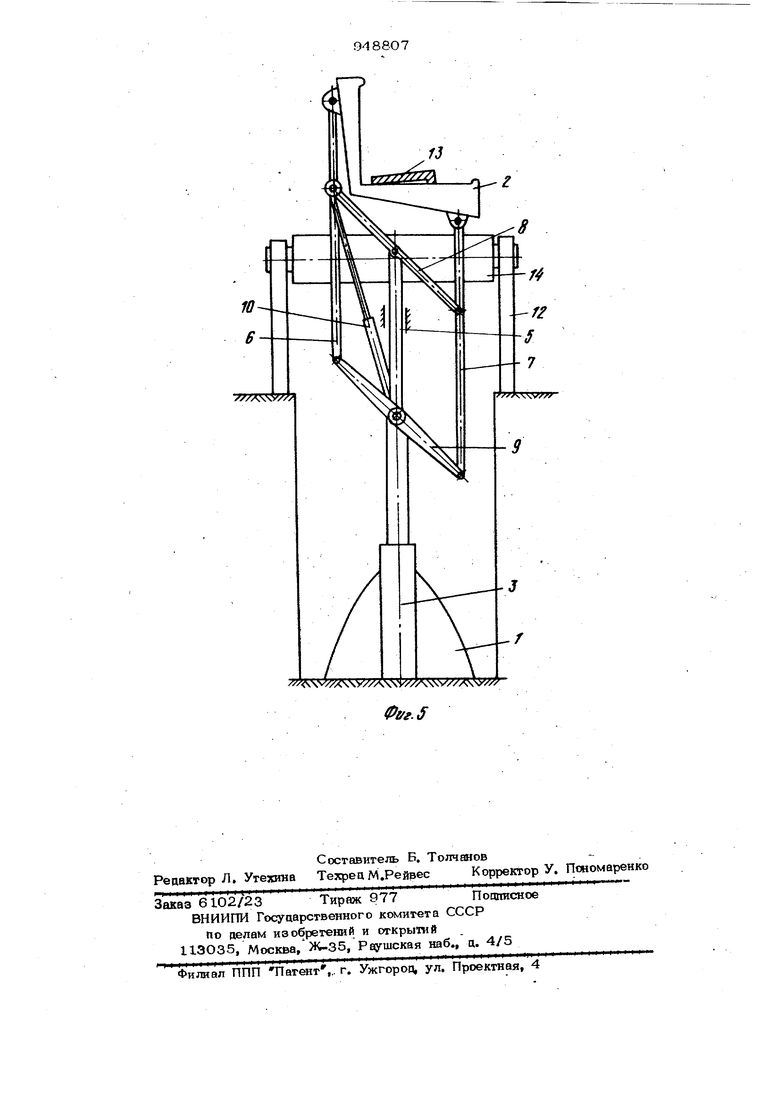
Изобретение относится к внутризавоцскому оборудованию и мсисет быть использовано в механизированных пиниях различных отраслей промышленности. Известно устройство цля кантования грузов на роликовом конвейере, включаго-щее основание, размещенные межпу роли ками конвейера захваты в виде опорных лап, силовой цилиндр поворота захвата и силовой цилиндр поворота опорных , лап Г Недостатком устройства является повреждение грузсй при их кантовании за счет взаимодействия кромки груза с вращающимися роликами конвейера и применение дополнительного силового цилинара пшорота опорных лап. Наиболее близким к изобретению по технической сущности и достигаемому ре льтату является устройство для кантования грузов на роликовом конвейере, включающее основание, размещенные между роликами захваты, каждый из которых выполнен в виде опорных лап, связанных рычагами с силовым цилиндром поворота захвата 2. Недостатком устройства яв Гяется повреждение нижних кромок грузом при кантовании за счет их взаимодействия с роликами конвейера. Целью изобретения является уменьщёние повреждения грузов при кантовании. Поставленная цель достигается тем, что предложенное устройство снабжено цилиндром подъема захвата, при этом рычаги установлены параллельно друг другу rf сВ513аны между собой посре1Ютвом шарнирно соединенных с 1шми коромысел, шарнирно соединенных со штоком силового цилиндра подьема. На фиг. 1 изображено устройство, вид с торца; на фиг. 2 - то же, вид сбоку; на фиг. 3-5 - варианты положения устройства (опущенное, в момент кантовки груза, после кантовки). Устройство для кантования грузов содержит основание 1, захват 2 грузо, мо- 94 ханизм подъема захвата груза, выполненный в вице силового цилтшцра 3 и вертикального штока 4, перемешающегося ввер или ВНИЗ по направляющим 5, и механизм кантования захвата груза, состоящий из вертикальных штанг 6 и 7, соеоикенных шартнрно с коромыслами 8 и 9 в вице параллолорраммо, имеющего силовой цилинар поворота Ю. Зазшат груза 2 шарнирно соешп1ен кснцами своих опорных лап 11 с вертикпльнык-т штангами 6 и 7. Коромысла 8 и 9 шарнирно соединены со штоками 4, являющимся продолжением ползуна цилиндра 3. Устройство цля кантования грузов вмонтирсеаио в стационарный роликовый конвейер 12, по которому транспортируется груз 13 по роликам 14, между которыми paз feJцeны захваты. Расстояние мсжоу 3axBaTaNni грузов должно быть меньше наименьиюй длины груза. Силовые цилиндрыЗ и 1О работают синхронно и имеют автономное управление. Устройство цля кантованиг: грузов работает сле : ю1дпм образом. Груз 13 ( преимущественно заготовки или детали из сортового проката) подается в зону действия устройства по роликовому конвейеру 12. Исходное положение устройство для кантования груза таково, что захват груза 2 находится ниже опор ной поверхности роликов 14 (см. фиг.З). С помощью цилиндра 3 груз 13 поднимается опорной лапой 11 захвата груза 2 над роликами 14 конвейера 12 и останавливается в крайнем верхнем пол{ жении (см. фиг. I). Затем включается цилиндр 10, щтанги 6 и 7 перемещаются соответственно вверх и вниз, благодаря чему захват груза 2 поворачт вается в вертикальной плоскости на 9О°, груз 13 переворачивается и падает на опорную поверхность второй лапы 11 захвата груза 2 (см. фиг. 4 Цилиндр 3 ог скает захват груза 2 ниже уровня роликов 14 кшвейера 12, и 74 груз 1x3 укладывается после кантовки на ролики 14. Затем груз по конвейеру 12 отправляется в накопитель или. на дальнейшую обработку. Слегукяций поступающий на конвейер 12 груз 13 останавливается на конвейере, после чего цикл работы устройства аля кантования грузов повторяется. После Ъкончания второго цикла устройство возвращается в исходное положение (см. фиг. 3). В зависимости от поперечного сечения груза исходное полсвкение устройства может быть изменено на обратное. Управление устройством осуществляется дистанционно с местного пульта управления. Технико-эксиомические преимущества предложенного устройства состоят в снижении повреждения кромок грузсж. Формула изобретения Устройство для кантования грузов на роликовом конвейере, включающее основание, размещенные между роликами конвейера захваты, каждый из которых вь(полнен в виде опорных лап, связанных рычагами с силсвым цилиндром поворота йахвата, о тличаюшоеся тем, что, с целью уменьшения поврежде1шя грузов при Кантовании, оно снабжено силовым цилиндром подъема захвата, при этом рычаги установлены параллельно друг другу и связаны между собой посредством шараирно соедушенных с roiми коромысел, которые шарнирно соединены со штоком силового цилиндра по- дьема. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 606782, кл. В 65 G 47/00, 1975. 2, Авторское свидетельство СССР j 517341, кл. В 21 Б 39/32, 1975 (прототип).
и
Г4
V- V/V A V/// KNA /0 Nx- /XA:4 4
. /
J
фуг. 2
8
Г4
fZ
fff.ff
