1
Изобретение относится к геодезическим измерениям, в частности к способам получения ориентации приборов относительно направлений сторон сетей, закрепленных на местности.
Известен способ определения угла разворота лимба угломерного прибора относительно исходного направления, включающий установку угломерного прибора в узловую,точку, измерение направлений на ориентирные пункты из узловой точки, центрировку углог мерного прибора, редуцирование измеряемых направлений и вычисление угла разворота лимба rij.
Однако этот способ обладает большой трудоемокостью, связанной с необходимостью центрировки угломерного прибора, редуцированием измеряемых направлений, а также невысокой точностью определения из-за ошибок центрировки.
Известен также способ определения угла разворота лимба угломерного прибора относительно исходного направления, включающий измерение нап , равлений на ориентирные пункты из узловой точки, измерение расстояний от этой точки до ориентирных пунктов и вычисление угла разворота лимба 2.
Согласно известному способу угол разворота определяют через координатные условия, что связано с трудоемкими вычислениями.
Целью изобретения является снижение трудоемкости способа, обусловленной определением пространственного размещения угломерного прибора и ориентирных пунктов.
Эта цель достигается тем, что по способу, включающему измерение
20 направлений.на ориентирные пункты из узловой точки, измерение расстояний от этой точки до ориентирных пунктов и вычисление угла раз39 9338 4
ворота лимба, угломерныйприбор ориентирные пункты, а угол разустанавливают вне узловойточ- , ворота лимпа определяют из выки. измеряют направленияна ражения
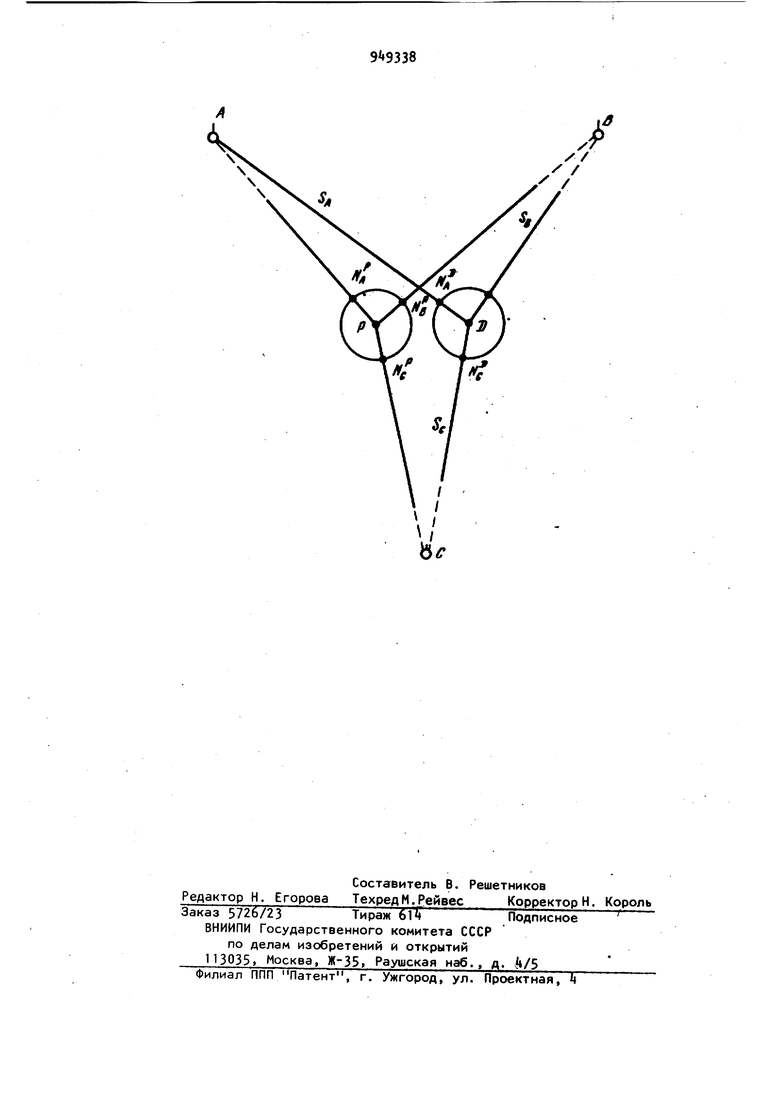
л/ ni-rtn-r tNl-M HU66in(KJ -MgXLcSiy() 1 «о-arc-cgrLbACOs4Ni-)()UcCOSCN -N) J , SAsin(N -Ng ); S.sin(N -N ); С-..э in vn J 11 / , LXsm(N|-Nj); расстояние от- узло вой точки до ориент ных пунктов; NAнаправления на орие тирные пункты из уз вой точки; . N,, N направления на орие тирные пункты из п извольной точки (вн узловой). На чертеже дана схема осуществления способа, где А, В и С ориентирные пункты; D - узловая точка; Р - произвольная точка. Для определения угла разворота лимба угломерного прибора относительно исходного направления, например угла между нулевым диаметро /горизонтального круга и меридианом, осевым меридианом или условной линией, угломерный прибор,уста навливают в точке DV измеряют направления на ориентирные пункты ki1 .. и 15 NB и NC измеряют расстояния от этой точки до ориентирных пунктов 5д, Sg и Sj. . Затем угломерный прибор устанавливают вне узловой точки, например в точке Р, измеряГ l.ASiM(.aSiHUg-Ng)-UcSiHCN -N) 1 Oijj arc-tg LlAC09(NVN KlaCO()-vLcCOS(NPc-N) J,
де (М -NB ); 4 SBsin(N| -N ); L- Scsin(NS -N -);
В A
расстояния от узловой точки до ориентирных пунктов; jO направления на ориентирные пункты из узловой точки;
направления на ориентирные пункты из про- 55
. извольной точки (вне узловой).
Источники информации, принятые во внимание при экспертизе
1.Соловьев А.Ф. и др. Геодезия. Ч. 1. М., Изд-80 МО СССР, 1966,
с. 353-355.
2.Ливанов М.М. Инженерно-геодезическая съемка и составление исполнительных планов промышленных предприятий. М., Недра, 1966, с. 70-71. ЮТ направления на ориентирные пункИ вычисляют угол разворота лимба относительно исходного направления по указанной формуле. Предлагаемый способ дает возможность снизить трудоемкость измерений угла разворота лимба и повысить точность его определения, позволяет проводить измерения относительно сторон любой протяжен ности при их пространственной нестабильности. Формула изобретения Способ определения угла разворота лимба угломерного прибора относительно исходного направления, включающий измерение направлений на ориентирные пункты из узловой точки, измерение расстояний от этой точки до ориентирных пунктов и вычисление угла разворота лимба, отличаю щ и и с я тем, что, с целью снижения трудоемкости способа, обусловленной определением пространственного размещения угломерного прибора и ориентирных пунктов, угломерный прибор устанавливают вне узловой точки, измеряют направления на ориентирные пункты, а угол разворота лимба определяют из выражения
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
| Способ передачи ориентирования | 2021 |
|
RU2761934C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЙ ОПОЛЗНЯ | 2024 |
|
RU2821434C1 |
| ПОЛЯРИМЕТРИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ВЗАИМНОГО РАЗВОРОТА | 1992 |
|
RU2047836C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки | 2016 |
|
RU2644999C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |