Изобретение относится к автоматизации технологических процессов и может быть использовано для управления конвейерами,.механизированными стеллажами, кассетами, библиотеками, информационным табло и т0п„
Цель изобретения - повышение надежности и быстродействия устройства
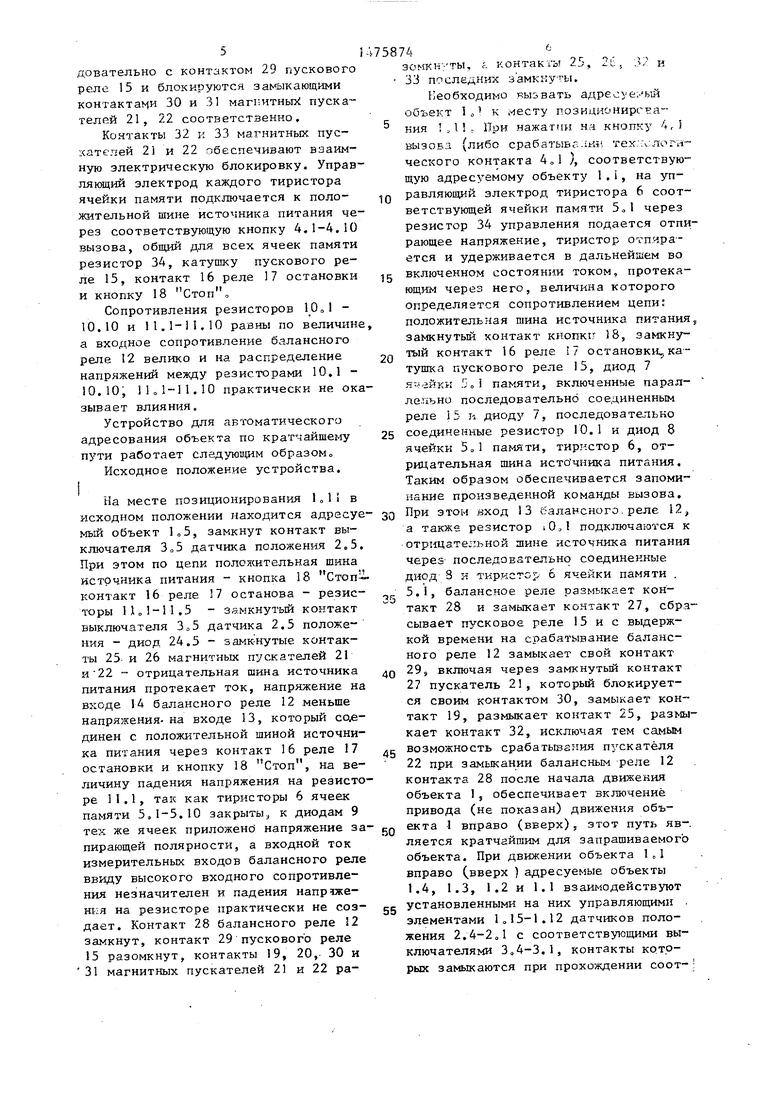
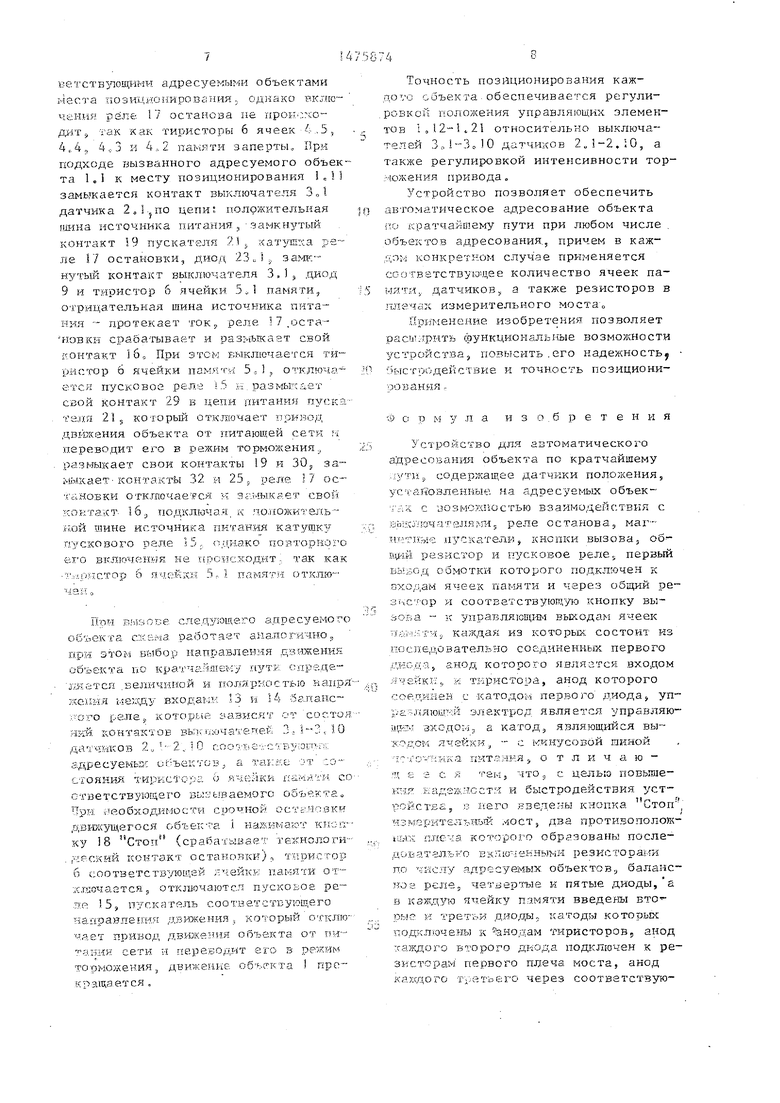
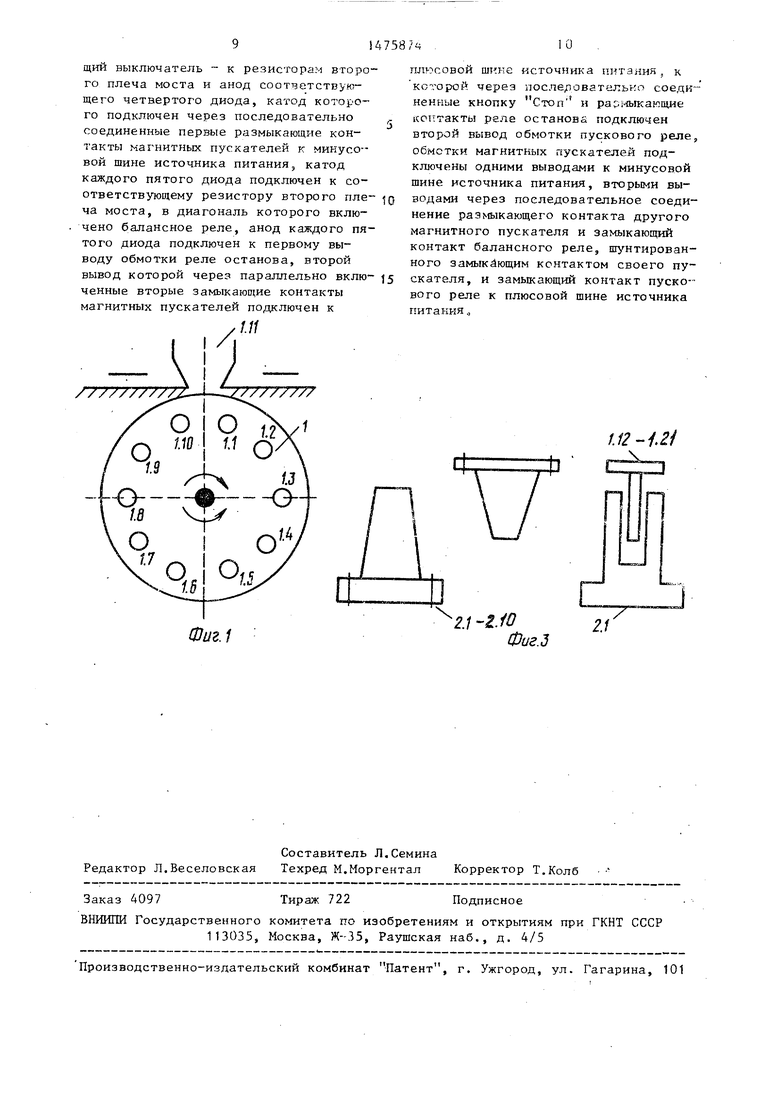
На фиг01 представлена схема расположения адресуемых объектов; на фиг,2 - принципиальная схема устройства; на фиГоЗ - схема датчика положения „
Устройство содержит выполненные, например, в виде кассеты адресуемые объекты 1 о 1- 1„10 к месту позиционирования 1 „ 11 о На адресуемых объектах установлены управляющие элементы „21 датчиков 201-2.10. Управляющие элементы установлены на адресуемых объектах таким образом, что взаимодействуют с выключателями 3.1- 3,10 соответствующих датчиков положения только при нахождении соответствующего адресуемого объекта в зоне позиционирования о Каждому адресуемому объекту соответствует своя кнопка 4а 1-4.10 вызова. Устройство содержит ячейки 5„1-5.10 памяти по числу адресуемых объектов, состоящие из тиристоров 6, к анодам которых подключены катоды диодов 7, 8 и 9, измерительный мост, состоящий из резисторов 10.1-10.10 и 11.1-11 „10, балансное ррле 12, измерительные вхо0
5 ды 13 и 14 которого подключены к диагонали измерительного моста (точкам соединения резисторов 10.1 и 10.2t 11.1 и 11„2). Аноды диодов 8 ячеек 5.1-5.10 памяти подключены к соотд ветствующим резисторам 10.. Аноды диодов 7 включены в цепь питания пускового реле 15 s которое подключено к положительной шине источника питания через замыкающий контакт 16 реле 17 остановки и замыкающий контакт кнопки 18 Реле 17 остановки подключено к положительной шине источника питания через параллельно соединенные контакты 19 и 20 магнитных пускателей 21 и 22 привода объектов К обмотке реле 17 подключены соединенные анодами диоды 23,1-23.10, катоды которых подключены к соответствующим резисторам 11.2с Но 10, к которым также подключены выключатели 3.1-3.10 датчиков 2.1-2,10 адресуемых объектов. Кроме того,выключатели датчиков .10 соединены с анодами диодов 9 соответствующих ячеек 5„1-5.10 памяти, а также с анодами диодов 24.1-24.10, которые соединены катодами и через соединенные последовательно контакты 25 и 26 магнитных пускателей 21 и 22 подключены к отрицательной шине источника питания.
Контакты 27. и 28 балансного реле 12 включены в цепи питания катушек магнитных пускателей 21 и 22 после0
5
довательно с контактом 29 пускового реле 15 и блокируются замыкающими контактами 30 и 31 маггитных пускателей 21, 22 соответственно.
Контакты 32 к 33 магнитных пус- хатрлей 21 и 22 обеспечивают взаимную электрическую блокировку. Управ ляющий электрод каждого тиристора ячейки памяти подключается к положительной шине источника питания через соответствующую кнопку 4.1-4.10 вызова, общий для всех ячеек памяти резистор 34, катушку пускового реле 15, контакт 16 реле 17 остановки и кнопку 18 Стоп,
Сопротивления резисторов 1001 - 10.10 и П.1-П.10 равны по величине а входное сопротивление балансного реле 12 велико и на распределение напряжений между резисторами 10.1 - 10.10, IK 1-1 1.10 практически не оказывает влияния.
Устройство для автоматического адресования объекта по кратчайшему пути работает следующим образом
Исходное положение устройства.
На месте позиционирования 1„1 в исходном положении находится адресуемый объект 105, замкнут контакт выключателя 3,5 датчика положения 2.5. При этом по цепи положительная шина источника питания - кнопка 18 Стоп контакт 16 реле 7 останова - резисторы И„1-11.5 - замкнутый контакт выключателя 305 датчика 2.5 положения - диод 24.5 - замкнутые контакты 25 и 26 магнитных пускателей 21 отрицательная шина источника питания протекает ток, напряжение на входе 14 балансного реле 12 меньше напряжения- на входе 13, который со.е- динен с положительной шиной источника писания через контакт 16 реле 17 остановки и кнопку 18 Стоп, на величину падения напряжения на резисторе 11.1, так как тиристоры 6 ячеек памяти 5.1-5.10 закрыты., к диодам 9 тех же ячеек приложено напряжение запирающей полярности, а входной ток измерительных входов балансного реле ввиду высокого входного сопротивления незначителен и падения напр raceme на резисторе практически не создает. Контакт 28 балансного реле 12 замкнут, контакт 29 пускового реле 15 разомкнут, контакты 19, 20, 30 и 31 магнитных пускателей 21 и 22 ра
75874(эомкь ты, ; контак/у 25. 2С, ,л и 33 п слемних замкнуты.
Необходимо вызвать .-ый объект 1 о к месту гозиционирсЕд- кия КП- При нажатии Hi кнопку 4,.5 вызов т. {либо срабатывг тех . логического контакта 4„1 /, соответствующую адресуемому объекту 1.1, на уп- IQ равляющий электрод тиристора 6 соответствующей ячейки памяти 5„1 через резистор 34 управления подается отпирающее напряжение, тиристор отп-фа- ется и удерживается в дальнейшем во J5 включенном состоянии током, протекающим через него, величина которого определяется сопротивлением цепи: положительная шина источника питания,
замкнутый контакт кпопкг 18, замкну- 2Q тый контакт 16 реле 17 остановки,катушка пускового реле 15, диод 7 ямайки - о памяти, включенные парал- последовательно соединенным реле 15 и диоду 7, последовательно 25 соединенные резистор 10.1 и диод 8 ячейки 5„1 памяти, тиристор 6, отрицательная шина исто чннка питания. Таким образом обеспечивается запоминание произведенной команды вызова. 3Q При этом вход S3 балансного реле 12, а также резистор .0 подключаются к отрицэтелы-юй шине источника питания через последовательно соединенные диод 3 и тиристор 6 ячейки памяти . Г1Г 5.1, балансное реле размыкает контакт 28 и замыкает контакт 27, сбрасывает пусковое реле 15 и с выдержкой времени на срабатывание балансного реле 12 замыкает свой контакт 4о 29, включая через замкнутый контакт 27 пускатель 21, который блокируется своим контактом 30, замыкает контакт 19, размыкает контакт 25, размыкает контакт 32, исключая тем самым 45 возможность срабатывания пускателя 22 при замыкании балансным реле 12 контакта 28 после начала движения объекта 1, обеспечивает включение привода (не показан) движения объ- -Q екта 1 вправо (вверх), этот путь является кратчайшим для запрашиваемого объекта. При движении объекта 101 вправо (вверх ) адресуемые объекты 1.4, 1.3, 1.2 и 1.1 взаимодействуют установленными на них управляющими элементами 1.15-1.12 датчиков положения 2.4-201 с соответствующими выключателями 3,4-3.1, контакты которых замыкаются при прохождении соот-
5
i f сi вуюшинм адресуемыми объектами лес ( lOuHu i ijRrr Bt ния гд«1ко гглге- пиг raj t 1; останова ае прел c- ., C.K с-ч iHpjHciopbi 6 ячее-с b, 4 4 „ ч 3 и 4 1 Пс.ити заперты lip подходе вызванного адресуемого объек та 1 в I к месту позиционирования КМ замыкается контакт зьичпючтт чч 1„1 датчика 2.1}по цепи положительная тика источника пиганчя, чамкчутыт кон г-iK т IQ п, ); ajyir ч те не / остановки, риоц 23 3aw- H-V 1ый контакт выклю еяя 3,1, идо 9 и т ipnc iop б ячейки 5 1 памяти,
о 1р цат т1ьнал шина истоиц-тка пчтаич - протекает гок„ меле 17 BQBIC с аоэгыва гп и раз 1ыка°т
оптант J6, При сгс и-ключае гс,я JH и iriop о ячейки navs i 5 1 о-ткдчэ i iv. пусковое ре- г. i
контакт 9 ь ц en ч nv( tТочность позиционирования каж- 1О -, оъекда обеспечиваемся регули- i шя управляющих элементов .12-1,21 относительно вьключа- -е-ей 3 i i0Ю д тчихсв 201-2.,0, а также регулировкой интенсивности тор привода.
VCTPOHCCBO позволяет обеспечить яь шм i ическое аоресование объекта
грэтча/О ему пути при любом числе ijfb be.iv гов адресования, примем в кажт ххочкреиоп случае применяется с j р -гству.оцее количество ячеек па- tfr датчиков, а также резисторов в измерительного моста
ченепие изобретения позволяет pur--- гоункциопгл ные возможности ус, -эсйсгва, n ncriTb его надежность it i и деист зие и точнгс-ь позициони- 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
| Устройство для защитного отключения электроустановки | 1988 |
|
SU1576969A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1024882A2 |
| Устройство для сигнализации о состоянии электроагрегата | 1984 |
|
SU1168994A1 |
| Автоматическое устройство для намагни-чиВАНия и РАзМАгНичиВАНия | 1979 |
|
SU847381A1 |
| Устройстро для токовой защиты электродвигателя от аварийных режимов работы | 1987 |
|
SU1527686A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1982 |
|
SU1174905A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
Изобретение относится к автоматизации технологических процессов и может быть использовано для управления объектами различного назначения. Цель - повышение надежности и быстродействия. Устройство содержит датчики положения, выключатели 3, кнопки 4 вызова, ячейки 5 памяти. Пусковое реле 15 через введенную кнопку 18 "Стоп" и контакт 16 реле 17 обеспечивает подключение ячеек 5 памяти к шинам питания. Дополнительные диоды 8, 9, подключенные параллельно диодам 7 в ячейках 5 памяти, обеспечивают подключение датчиков к резисторам 10 введенного измерительного моста. Резисторы 11 моста включены через выключатели 3 и диоды 24 в цепи магнитных пускателей. Балансное реле 12 подключено к резисторам 10, 11 и через диоды 23, реле 17 установки к контактам 19, 20 магнитных пускателей. Пусковое реле 29 обеспечивает подключение контактов 27, 28, 30, 31, 32, 33 магнитных пускателей 21, 22 к шинам питания. При нажатии на соответствующую кнопку 4 вызова на управляющий электрод тиристора 6 ячейки 5 памяти подается через резистор 34 отпирающее напряжение по цепи: плюсовая шина истоника питания - кнопка 18 "Стоп" - контакт 16 реле 17 останова - обмотка 15 пускового реле - диод 7-резистор 10 - диод 8 - минусовая шина источника, обеспечивая запоминание вызова. Контакт 27 реле 12 замыкается, а контакт 28 размыкается. Через время выдержки замыкается контакт 29, включая пускатель 21, который блокируется контактом 30, замыкая контакт 19 и размыкая контакты 25 и 30, исключая срабатывание пускателя 22 и обеспечивая движение объекта вправо (вверх) по кратчайшему пути. 3 ил.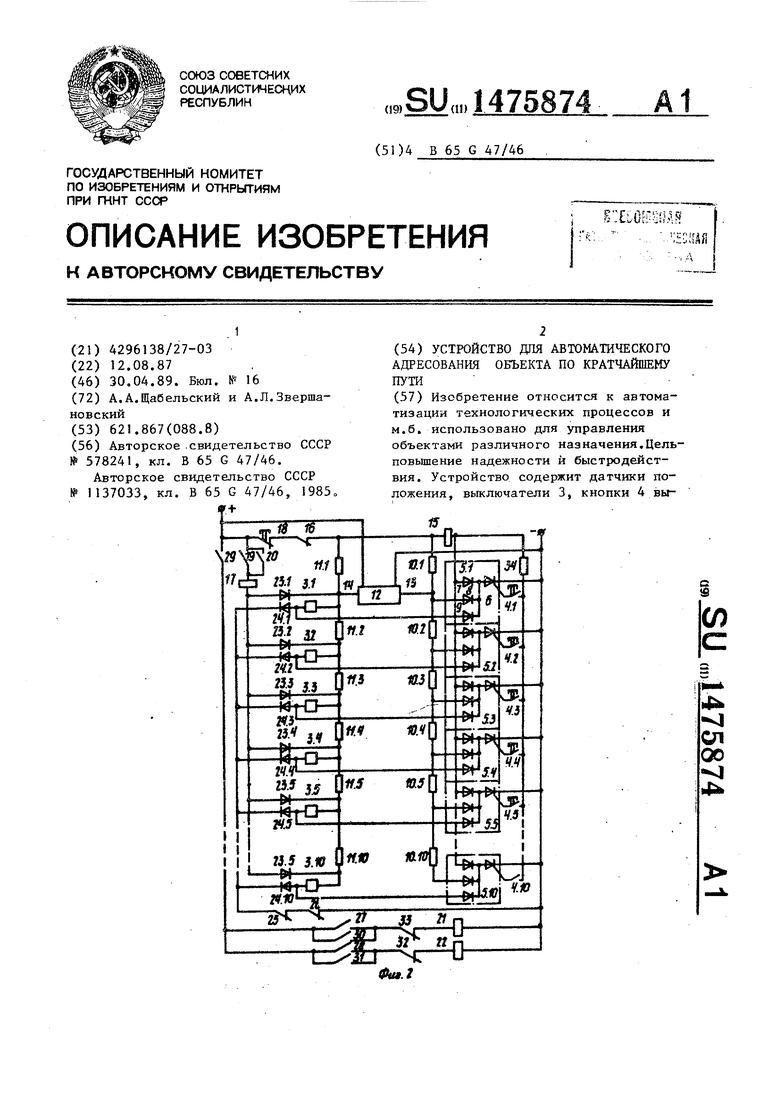
2is который атлто аег
Ь i ,,f
объект m питающей of: перевоцит в оэжим торможения ра нькаег свои коитньты 19 я 30S ча юркает кон РЭ тЬ 32 i 25 пс-Л0 / ;с- -гиъки о гкггочае Cv ч ( сЕО 1
-)f rp (Т 6 ., тюп.СЛК, TOuOMt- 8„ --.
t ой мне и точнис а лт- кзтушк Г| c OBjro °пе lOrMODij с
т О И F те r i и orti-iT т ЭК КЧК
j С I i С 1 Ч I f ,i i n ( I j (Л ПЮ
UOTJ - rp -TQr-ч лце с стгоес1геио с t с з -шо„ M| , этой ь ibo напгаълеп 14 с женн d пс, чуа i -- iv,i у ri п,°j 1 СЯ 1 еЛ -1Ч И Т ОП/н f Lie Ть,0 Ъг-1ЦОЛ
с i t ; д:, вгосаи1 j s 1 о |спе и изис и 1, 1чОЧ K.Jt чп i q- ipr ° ° 5 О ,аг аов1 iff- 3
дресуемьл v, ъ н г
XWJ. i J. iOr
с ветсгв э ь.ет о л rinae jrc oji - 0
Po6xOr l-ljOv Ч11 roouhO. Ofi ЭГ
пЕЮлутдргеся обт с с1 л -id t л у 18 Стотт (cpanai JS0
ГГЛИИ I i ОСтаГП К ) г |jf О
Г v оотзегст.3 /юн ейкт rat У и о 1.1 оч зтс5 э отгл1 1чаю т п/сго ое ре
т 5, П г оо ц.у,Ч1 0ГО
г (оаяпе ftf т даеччч о г гклг
ЯОТ /( Об и.Тс О Т -Т
п . i rrepei-o iHT Ci .- з
ГООЬ , ДВИ)РЬЬС - 1 - 1 гр
f 1Щ-эег1 ся .
J L Р
п а
из тбретения
с 1 о но длч автоматического адоесг jriHi-m объекта по кратчайшему и сцеолашее положения, с рткэг-шрльг.т- ча доесуег-ых объекv Г J ЧОсГЪЮ Е ат1МО ТЕЬЯ С
„Ч 3 г Л
репе останова, ма
ч bj п vTri чг гел s смолки вызова, оо- Hk - .хс, ор и ус овое реле первый L гц сомогки которог по пяточек к ам nai яти и t грез обищй -эе
г гор л i оотве ствую цуто кнопку вы- а - управляющим выходэ 1
ii к -1 чцая из i оторьо- состоит чз
т i r ьс -изатин- го соединенных первого
s которого являемся вхоцом s « ристоза, анод которого
ег- .е7 - атодО) пррко о тиода, уп j. 4. i яю1 jKeKTpo являемся праьляю- ,г- j а кагод, являющийся выч т -u - v-T-ili/СОВОЙ nFrfO 1%1Т Л, ОТЛИЧоЮ , , го с целыо посыше-
t i , л быстродействия угт i i ri ,3ет о r-зете ы к-юпхз Стоп
т i ч i tj-v- vsoci, два ПРОТИВОПОЛОЖ- t i nc - к i i/n о образовань1 после- j. L |Гз --лт г р LJ с1 мь i к лг Л1 -t f тдрссуемь х объектов j балатю- jj рс.ле5 че ерг ыа i пятые диоды, а в 4t-etiKv памяти введены г ч i ре л катоды woTODuK од ч ало ам иристооов, анод чхд п о я- оро- о д о з подключен к; ре- первого плеча моста, анод ч пгого 1Л ,1С через cooiaaTcriByra
щий выключатель к резисторам второго плеча моста и анод соответствующего четвертого диода, катод которого подключен через последовательно соединенные первые размыкающие контакты магнитных пускателей к минусе-- вой шине источника питания, катод каждого пятого диода подключен к соответствующему резистору второго пле- ча моста, в диагональ которого включено балансное реле, анод каждого пятого диода подключен к первому выводу обмотки реле останова, второй вывод которой через параллельно вклю- ченные вторые замыкающие контакты магнитных пускателей подключен к
Фиг.1
плюсовой шике источника питания, к которой через последовательно соединенные кнопку Стоп и размыкающие контакты реле останова подключен второй вывод обмотки пускового реле, обметки магнитных пускателей подключены одними выводами к минусовой шине источника питания, вторыми выводами через последовательное соединение размыкающего контакта другого магнитного пускателя и замыкающий контакт балансного реле, шунтированного замыкающим контактом своего пускателя, и замыкающий контакт пускового реле к плюсовой шине источника питания„
Фиг.З
/
| Устройство для автоматического адресования объекта по кратчайшему пути | 1974 |
|
SU578241A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
