(54) ШАГАЮЩИЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1985 |
|
SU1305087A1 |
| Шагающий конвейер | 1981 |
|
SU988690A1 |
| Автомат для загрузки деталей на каретку автооператорной линии | 1977 |
|
SU708000A1 |
| Шагающий конвейер | 1980 |
|
SU925796A1 |
| Шаговый конвейер-накопитель | 1977 |
|
SU716921A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1968 |
|
SU220836A1 |
| Шагающий конвейер | 1983 |
|
SU1183434A1 |
| Конвейер для перемещения деталей | 1973 |
|
SU611587A3 |
| Штанговый конвейер | 1978 |
|
SU763215A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
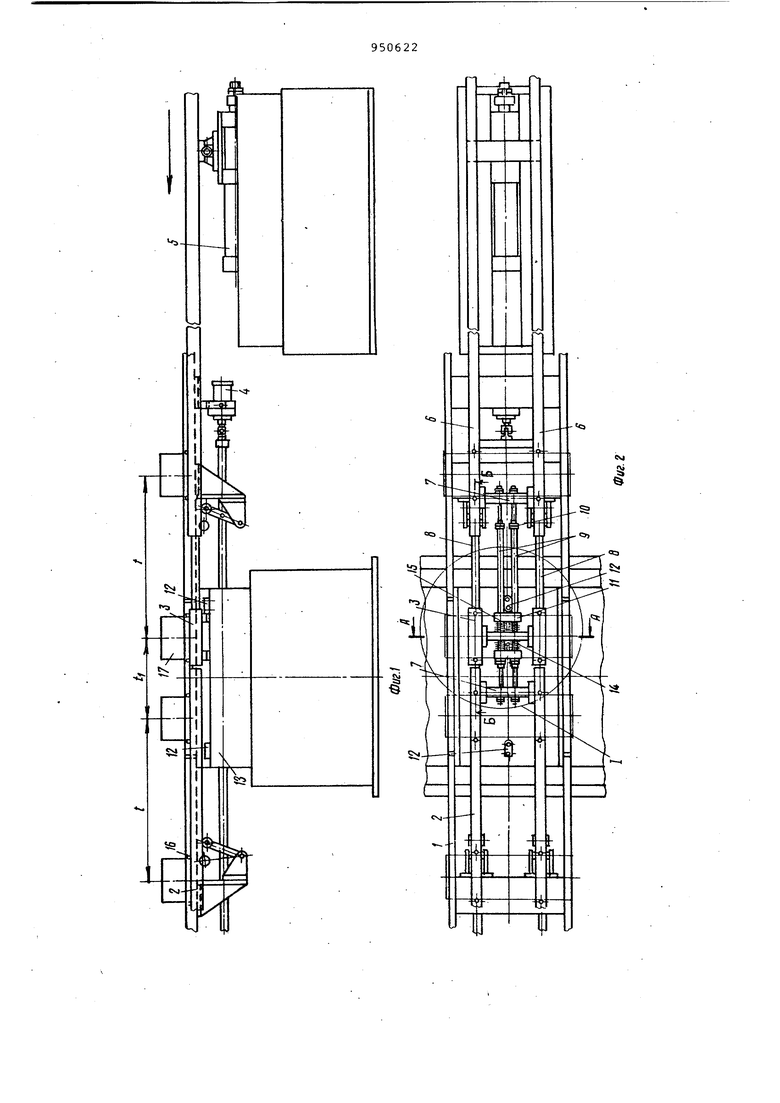
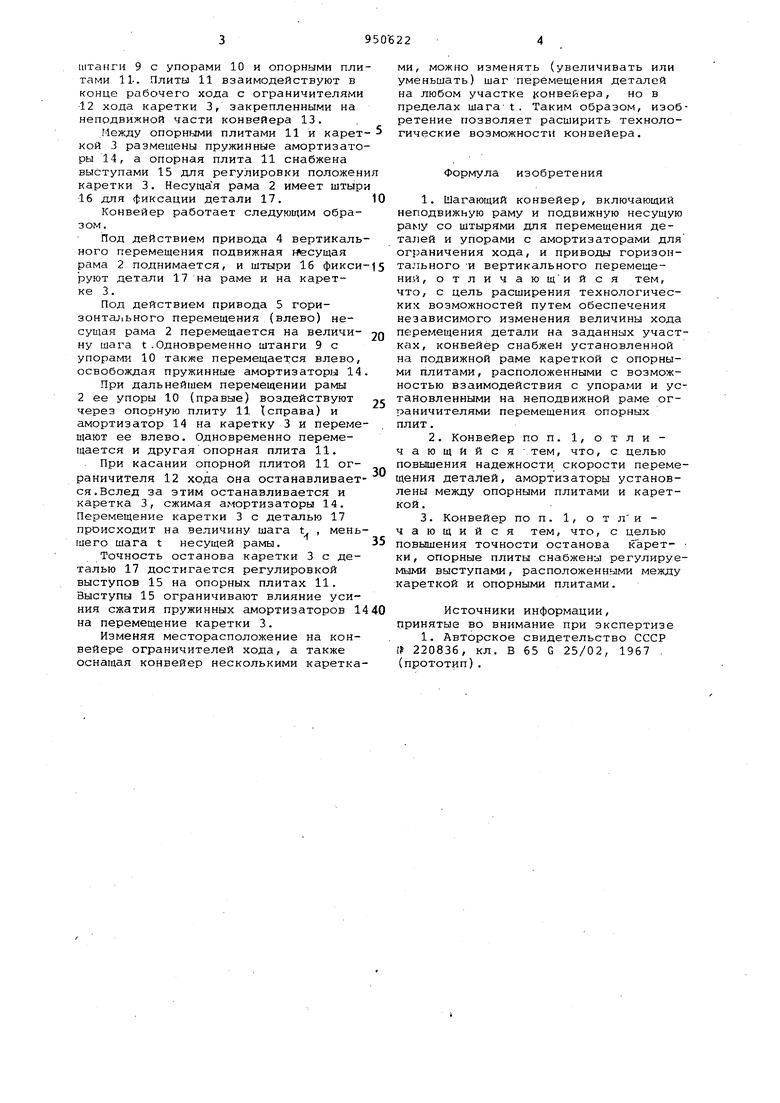
Изобретение относится к транспортным средствам- для перемещения обрабатываемых деталей. Наиболее близким техническим решением является шагающий конвейер, содержащий неподвижную часть и подвижную несущую раму со штырями для перемещения деталей и упорами с амортизатора.ми для ограничения хода, а также приводы горизонтального и вертикального перемещений. Несущая рама выполнена секционной.. Между секциями закреплены взаимодействующие при.холостом ходе несущей рамы призма тические упоры 1. Этот конвейер позволяет перемещать несущую раму в пределах, длины хода, привода горизонтального перемещения, однако каждый измененный шаг перемещения несущей рамы меньше предыдущего что является недостатком транспортера Цель изобретения - расширение технологических возможностей путем обеспечения независимого изменения величины хода перемещения детали на заданных участках. Поставленная цель достигается- тем что шагающий конвейер, включающий неподвижную раму и подвижную несущую ра су со штырями для перемещения деталей и упорами с амортизаторами для ограничения хода, и приводы горизонтального и вертикального перемещений, снабжен установленной на подвижной раме кареткой с опорными плитами, расположенными с возможностью взаимодействия с упорами и установленными на неподвижной раме ограничителями перемещения опорных плит. Кроме того, амортизаторы установлены между опорными плитами и кареткой, а опорные плиты снабжены регулируемыми выступами, расположенНЕЛми между кареткой и опорными плитами. На фиг. 1 показан конвейер, общий вид; на фиг. 2 - то же, план; на фиг 3 - сечение А-Л на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - узел 1 на фиг. 2. Конвейер содержит неподвижную раму 1 в виде опорных планок, подвижную несущую раму 2 с подвижной относительно несущей рамы кареткой 3, а также привод 4 вертикального и- привод 5 горизонтального перемещений несу цей рамы. Несущая рама 2 состоит из продольных планок 6, поперечных стяжек 7 и направляющих штанг 8. В поперечных стяжках 7 закреплены две продольные штанги 9 с упорами 10 и опорными пли тами 11-. Плиты 11 взаимодействуют в конце рабочего хода с ограничителями 12 хода каретки 3, закрепленными на неподвижной части конвейера 13. Между опорными плитами 11 и карет кой 3 размещены пружинные амортизато ры 14, а опорная плита 11 снабжена выступами 15 для регулировки положен каретки 3. Несущая рама 2 имеет штыр 16 для фиксации детали 17. Конвейер работает следующим образом. Под действием привода 4 вертикаль ного перемещения подвижная ь сущая рама 2 поднимается, и штыри 16 фикси руют детали 17 на раме и на каретке 3. Под действием привода 5 гориsoHTajibHoro перемещения (влево) несущая рама 2 перемещается на величину шага t.Одновременно штанги 9 с yпopa /ш 10 также перемещается влево, освобождая пружинные амортизаторы 14 При дальнейшем перемещении рамы 2 ее упоры 10 (правые) воздействуют через опорную плиту 11 1( справа) и амортизатор 14 на каретку 3 и переме щают ее влево. Одновременно перемещается и другая опорная плита 11. При касании опорной плитой 11 ограничителя 12 хода она останавливает ся.Вслед за этим останавливается и каретка 3, сжимая амортизаторы 14. Перемещение каретки 3 с деталью 17 происходит на величину шага t , мень шего шага t несущей рамы. Точность останова каретки 3 с деталью 17 достигается регулировкой выступов 15 на опорных плитах 11. Выступы 15 ограничивают влияние усиния сжатия пружинных амортизаторов 1 на перемещение каретки 3. Изменяя месторасположение на конвейере ограничителей хода, а также оснащая конвейер несколькими каретка ми, можно изменять (увеличивать или уменьшать) шаг перемещения деталей на любом участке { онвейера, но в пределах шага-t. Таким образом, изобретение позволяет расширить технологические возможности конвейера. Формула изобретения 1. Шагающий конвейер, включающий неподвижную раму и подвижную несущую раму со штырями для перемещения деталей и упорами с амортизаторами для ограничения хода, и приводы горизонтального И вертикального перемещений, отличающийся тем, что, с цель расширения технологических возможностей путем обеспечения независимого изменения величины хода перемещения детали на заданных участках, конвейер снабжен установленной на подвижной раме кареткой с опорными плитами, расположенными с возможностью взаимодействия с упорами и установленными на неподвижной раме ограничителями перемещения опорных плит. 2. Конвейер по п. 1, отличающийся -тем, что, с целью повышения надежности скорости перемещения деталей, амортизаторы установлены между опорными плитами и кареткой . 3. Конвейер по п. 1, о т ли чающийся тем, что, с целью повышения точности останова карет- ки, опорные плиты снабжены регулируемыми выступами, расположенными между кареткой и опорными плитами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 220836, кл. В 65 G 25/02, 1967 . (прототип). Фиг. 5 .
Й-Ц
1г 7/
ФигЗ iZ 9 W 6
