(54) КАНТОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1980 |
|
SU901208A2 |
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| Кантователь | 1979 |
|
SU804316A1 |
| Кантователь | 1979 |
|
SU829380A1 |
| Кантователь | 1979 |
|
SU943157A1 |
| Кантователь | 1979 |
|
SU927686A1 |
| Устройство для кантования бетонных и железобетонных изделий | 1976 |
|
SU580984A1 |
| Кантователь изделий | 1989 |
|
SU1645222A1 |
| Устройство для очистки палет и деталей | 1986 |
|
SU1393595A1 |
| Кантователь листов | 1985 |
|
SU1286385A1 |
Изобретение относится к автоматизации подъемно-транспортных операций, может быть использовано во всех областях техники, где требуются простые и надежные механизмы, осуществляющие поворот на угол в пределах 180 грузов относительно больших габаритов и масс.
По основному авт.св. № 592690 известен кантователь, содержащий грузонесущую платформу с грузозахватныгуш элементами, которая качается на оси. Шток силового цилиндра соединен осью с грузонесущей платформой, а опорная часть - ролик - силового цилиндра подвижно установлена в пазу, выполненном с углублениями .1 .
Недостатком этого кантователя является невозможность обеспечения плавного поворота грузонесущей платформы с момента действия веса плааформы с грузом через ось вращения последней до момента совершения полного хода штока цилиндра, обусловленного возможностью отрыва опорного ролика цилиндра от рабочей поверхности фиксирующего гнезда вследствие наличия зазора между рабочей, поверхностью ролика и рабочей поверхностью паза, а также вследствие наличия зазоров в других элементах кантователя и упругой деформации их в процессе работы,т.е. обеспечивается относительно большой поворот платформы за малый ход штока цилиндра (большое ускорение поворота и резкий останов),
Цель изобретения - обеспечение плавного поворота грузонесущей платформы с грузом.
10
Поставленная цель достигается тем, что привод снабжен дополнительным цилиндром, корпус которого шарнирно соединен с основанием, а шток с поворотной платформой, при этом
15 оси шарнирных соединений корпуса дополнительного цилиндра с основанием и штока с платформой расположены в вертикальной плоскости, проходящей через ось платформы.
20
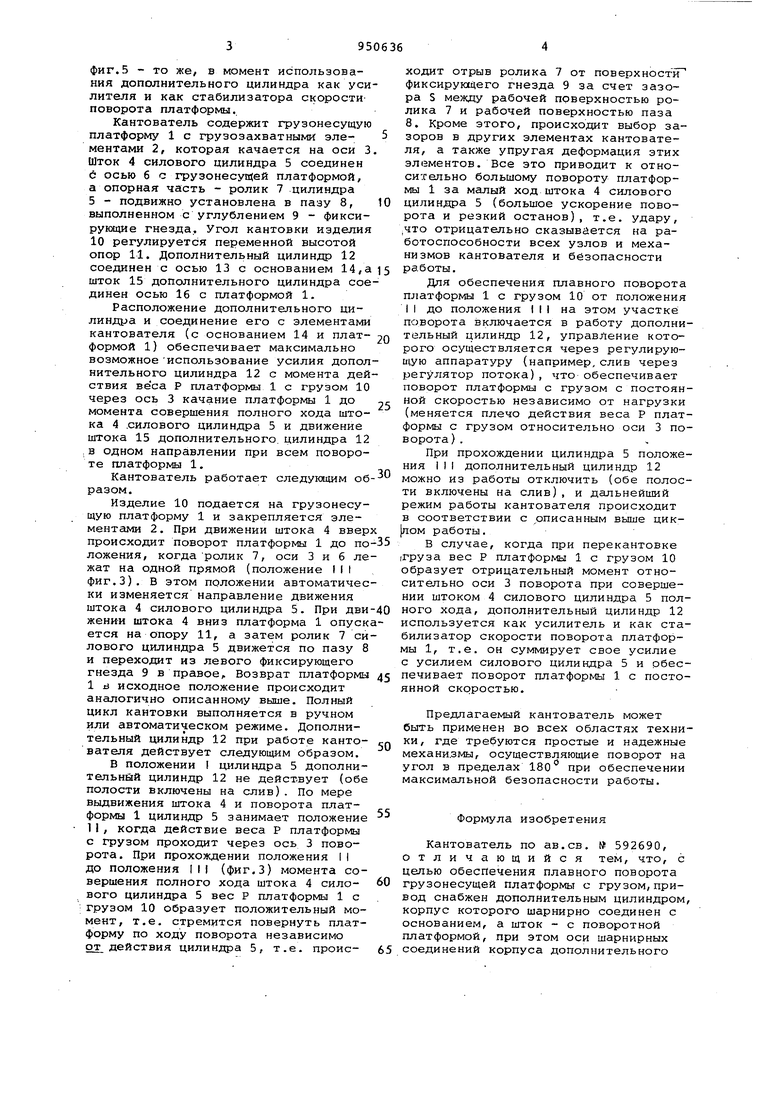
На фи1-.1 изображен кантователь в исходном положении на фиг.2 - то же, -в момент действия дополнительного цилиндра как стабилизатора скорости поворота; на фиг.З - то же,
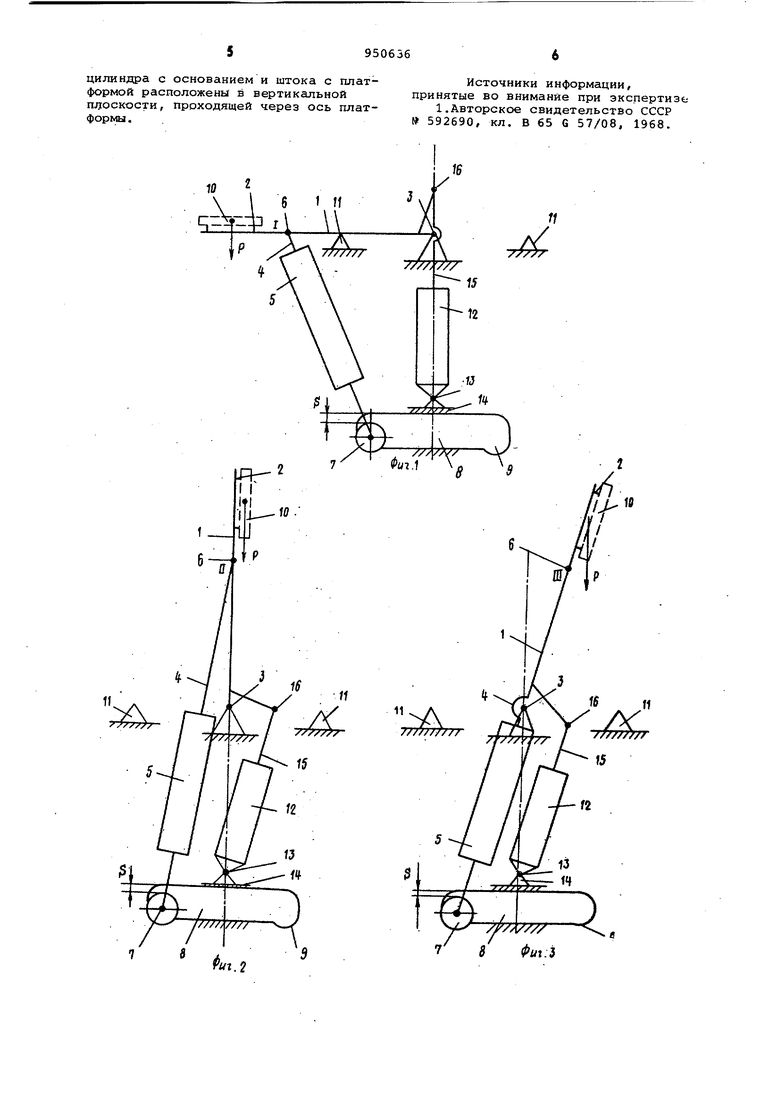
25 в совершения полного хода штока силового цилиндра; на фиг.4 то же, в момент окончания перекантовки груза и как исходное положэние кантователя при другом расположении
30 груза на грузонесущей платформе; на фиг.5 - то же, в момент использования дополнительного цилиндра как уси лителя и как стабилизатора скоростиповорота платформы.. Кантователь содержит грузонесущую платформу 1 с грузозахватными элементами 2, которая качается на оси 3 Шток 4 силового цилиндра 5 соединен 6 осью 6 с грузонесущей платформой, а опорная часть - ролик 7 цилиндра 5 - подвижно установлена в пазу 8, выполненном с углублением 9 - фиксирунхцие гнезда. Угол кантовки изделия 10 регулируется переменной высотой опор 11. Дополнительный цилиндр 12 соединен с осью 13 с основанием 14,а шток 15 дополнительного цилиндра сое динен осью 16 с платформой 1. Расположение дополнительного цилиндра и соединение его с элементами кантователя (с основанием 14 и платформой 1) обеспечивает максимально возможноеиспользование усилия допол нительного цилиндра 12 с момента дей ствия веса Р платформы 1 с грузом 10 через ось 3 качание платформы 1 до момента совершения полного хода штока 4 .силового цилиндра 5 и движение штока 15 дополнительного, цилиндра 12 ,в одном направлении при всем повороте платформы 1. Кантователь работает следукищм об разом. Изделие 10 подается на грузонесущую платформу 1 и закрепляется элементами 2. При движении штока 4 ввер происходит поворот платформы 1 до по ложения, когдаролик 7, оси 3 и 6 ле жат на одной прямой (положение III фиг.З). В этом положении автоматичес ки изменяется направление движения штока 4 силового цилиндра 5. При дви жении штока 4 вниз платформа 1 опуск ется на опору 11, а затем ролик 7 си лового цилиндра 5 движется по пазу 8 и переходит из левого фиксирующего гнезда 9 в правое. Возврат платформы 1 d исходное положение происходит ансшогично описанному выше. Полный цикл кантовки выполняется в ручном или автоматическом режиме. Дополнительный цилиндр 12 при работе кантователя действует следующим образом. В положении I цилиндра 5 дополнительнйй цилиндр 12 не действует (обе полости включены на слив). По мере выдвижения штока 4 и поворота платформы 1 цилиндр 5 занимает положение 1I, когда действие веса Р платформы с грузом проходит через ось 3 поворота. При прохождении положения II до положения III (фиг.З) момента совершения полного хода штока 4 силового цилиндра 5 вес Р платформы 1 с ;грузом 10 образует положительный момент, т.е. стремится повернуть платформу по ходу поворота независимо от действия цилиндра 5, т.е. происходит отрыв ролика 7 от поверхности фиксирующего гнезда 9 за счет зазора S между рабочей поверхностью ролика 7 и рабочей поверхностью паза 8. Кроме этого, происходит выбор зазоров в других элементах кантователя, а также упругая деформация этих элементов. Все это приводит к относительно большому повороту платформы 1 за малый ход штока 4 силового цилиндра 5 (большое ускорение поворота и резкий останов), т.е. удару, j4To отрицательно сказывается на работоспособности всех узлов и механизмов кантователя и безопасности работы. Для обеспечения плавного поворота платформы 1 с грузом 10 от положения I I до положения III на этом участке; поворота включается в работу дополнительный цилиндр 12, управление которого осуществляется через регулирующую аппаратуру (например, слив через регулятор потока), что обеспечивает поворот платформы с грузом с постоянной скоростью независимо от нагрузки (меняется плечо действия веса Р платформы с грузом относительно оси 3 поворота) . При прохождении цилиндра 5 положения III дополнительный цилиндр 12 можно из работы отключить (обе полости включены на слив), и дальнейший режим работы кантователя происходит в соответствии с описанным выше работы. В случае, когда при перекантовке (Груза вес Р платформы 1 с грузом 10 образует отрицательный момент относительно оси 3 поворота при совершении штоком 4 силового цилиндра 5 полного хода, дополнительный цилиндр 12 используется как усилитель и как стабилизатор скорости поворота платформы 1, т.е. он суммирует свое усилие с усилием силового цилиндра 5 и обеспечивает поворот платформы 1 с постоянной скоростью. Предлагаемый кантователь может быть применен во всех областях техники, где требуются простые и надежные механизмы, осуществляющие поворот на угол в пределах 180 при обеспечении максимальной безопасности работы. Формула изобретения Кантователь по ав.св. № 592690, отличающийся тем, что, с целью обеспечения плавного поворота грузонесущей плaтфop vIн с грузом, привод снабжен дополнительным цилиндром, корпус которого шарнирно соединен с основанием, а шток - с поворотной платформой, при этом оси шарнирных соединений корпуса дополнительного
цилиндра с основанием и штока с платформой расположены в вертикальной плоскости, проходящей через ось платформы .
Источники информации, принятые во внимание при экспертиза
1,Авторское свидетельство СССР 592690, кл. В 65 G 57/08, 1968.
