Изобретение относится к подъемнотранспортному маишностроению, а именно к приводам механизма вращения стреловой системы крана.
Известен привод механизма вращения стреловой системы крана, содержащий электродвигатель с аэродинамическим винтом и тормозом, включенными в цепь управления крана i .
Недостатком известного привода является малая эффективность его использования.
Цель изобретения - повышение эффективности использования привода.
Для достижения поставленной цели привод снабжен датчиками скорости вращения стрелы и ветрового давления и дополнительным электродвигателем с аэродинамическим винтом, причем оба упомянутых электродвигателя с аэродинамическими винтами установлены на стреле с расположением каждой оси вращения винта перпендикулярно вертикальной плоскости стрелы, причем один из электродвигателей включен в цепь управления через датчик скорости вращения стрелы и датчик ветрового давления, при этом последний установлен на стреле крана.
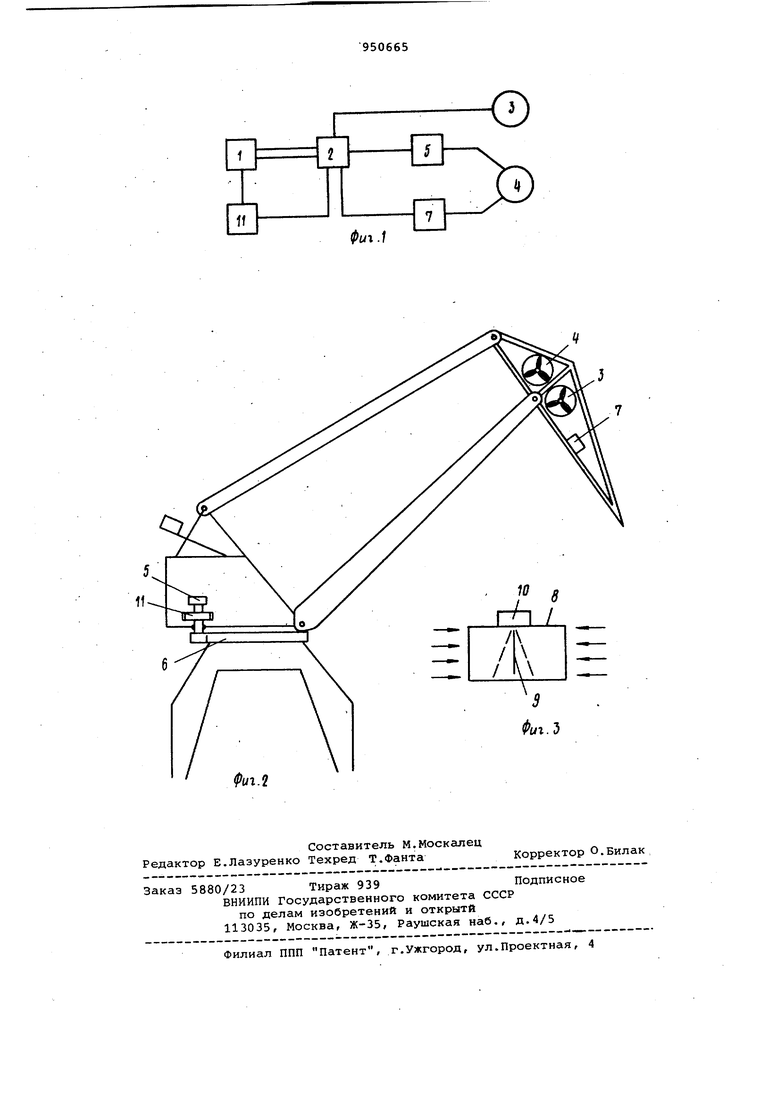
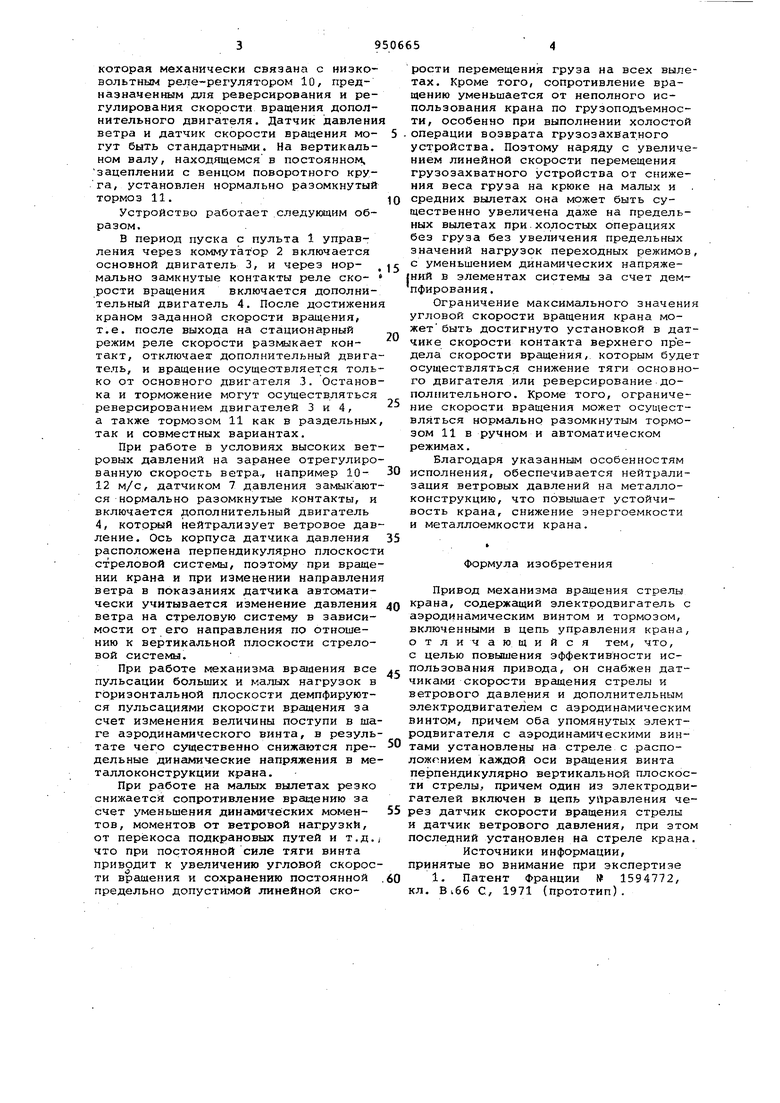
На фиг.1 изображена блок-схема привода механизма вращения на фиг.2-1 вариант схемы расположения элементов аэродинамического привода на кране; на фиг.З - схема работы датчика ветрового давления.
Привод механизма вращения содержит пульт 1 управления, расположенный в кабине машиниста, коммутатор 2 для
10 коммутации цепей управления, основной электродвигатель 3 с аэродинамическим винтом для преодоления сопротивления вращения в стационарном режиме, расположенный осью вращения винта пер15пендикулярно плоскости стреловой системы, дополнительный электродвигатель 4 с винтом для преодоления сопротивления переходных режимов и ветрового давления, расположенный, на20пример на хоботе, осью вращения винта параллельно основному двигателю, датчик 5 скорости вращения, установленный на вертикальном валу, который находится в постоянном зацеплении с
25 винтом поворотного круга 6, датчик 7 ветрового давления для регистрации давления и направления ветра, содержащий корпус прямоугольного сечения 8, в котором расположена подпружиненная
30 откалиброванная ветровая заслонка 9. которая механически связана с низковольтным реле-регулятором 10, предназначенным для реверсирования и регулирования скорости вращения дополнительного двигателя. Датчик давлени ветра и датчик скорости вращения могут быть стандартными. На вертикальном валу, находящемся в постоянном, зацеплении с венцом поворотного круга, установлен нормально разомкнутый тормоз 11. Устройство работает следующим образом, В период пуска с пульта 1 управления через коммутатор 2 включается основной двигатель 3, и через нормашьно замкнутые контакты реле скорости вращения включается дополнительный двигатель 4. После достижени краном заданной скорости вращения, т.е. после выхода на стационарный режим реле скорости размыкает контакт, отключает дополнительный двига тель, и вращение осуществляется толь ко от основного двигателя 3. Останов ка и торможение могут осуществляться реверсированием двигателей 3 и 4, а также тормозом 11 как в раздельных так и совместных вариантах. При работе в условиях высоких вет ровых давлений на заранее отрегулиро ванную скорость ветра., например 1012 м/с, датчиком 7 давления замыкают ся нормально разомкнутые контакты, и включается дополнительный двигатель 4, который нейтрализует ветровое дав ление. Ось корпуса датчика давления расположена перпендикулярно плоскост стреловой системы, поэтому при враще нии крана и при изменении направлени ветра в показаниях датчика автоматически учитывается изменение давления ветра на стреловую систему в зависимости от его направления по отношению к вертикальной плоскости стреловой системы. При работе механизма вращения все пульсации больших и малых нагрузок в горизонтальной плоскости демпфируются пульсациями скорости вращения за счет изменения величины поступи в ша ге аэродинамического винта, в резуль тате чего существенно снижаются предельные динамические напряжения в ме таллоконструкции крана. При работе на малых вылетах резко снижается сопротивление вращению за счет уменьшения динамических моментов, моментов от ветровой нагрузки, от перекоса подкрановых путей и т.д. что при постоянной силе тяги винта приводит к увеличению угловой скорос ти вращения и сохранению постоянной предельно допустимой линейной скорости перемещения груза на всех вылетах. Кроме того, сопротивление вращению уменьшается от неполного использования крана по грузоподъемности, особенно при выполнении холостой операции возврата грузозахватного устройства. Поэтому наряду с увеличением линейной скорости перемещения грузозахватного устройства от снижения веса груза на крюке на малых и средних вылетах она может быть существенно увеличена даже на предельных вылетах при.холостых операциях без груза без увеличения предельных значений нагрузок переходных режимов, с уменьшением динамических напряжеий в элементах системы за счет демпфирования. Ограничение максимального значения угловой скорости вращения крана может быть достигнуто установкой в датчике скорости контакта верхнего предела скорости вращения, которым будет осуществляться снижение тяги основного двигателя или реверсирование дополнительного. Кроме того, ограничение скорости вращения может осуществляться нормально разомкнутым тормозом 11 в ручном и автоматическом режимах. Благодаря указанным особенностям исполнения, обеспечивается нейтрализация ветровых давлений на металлоконструкцию, что повышает устойчивость крана, снижение энергоемкости и металлоемкости крана. Формула изобретения Привод механизма вращения стрелы крана, содержащий электродвигатель с аэродинамическим винтом и тормозом, включенными в цепь управления крана, отличающийся тем, что, с целью повышения эффективности использования привода, он снабжен датчиками скорости вращения стрелы и ветрового давления и дополнительньлм электродвигателем с аэродинамическим винтрм, причем оба упомянутых электродвигателя с аэродинамическими винтами установлены на стреле с расположением каждой оси вращения винта перпендикулярно вертикальной плоскости стрелы, причем один из электродвигателей включен в цепь управления через датчик скорости вращения стрелы и датчик ветрового давления, при этом последний установлен на стреле крана. Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 1594772, кл. В;66 С, 1971 (прототип).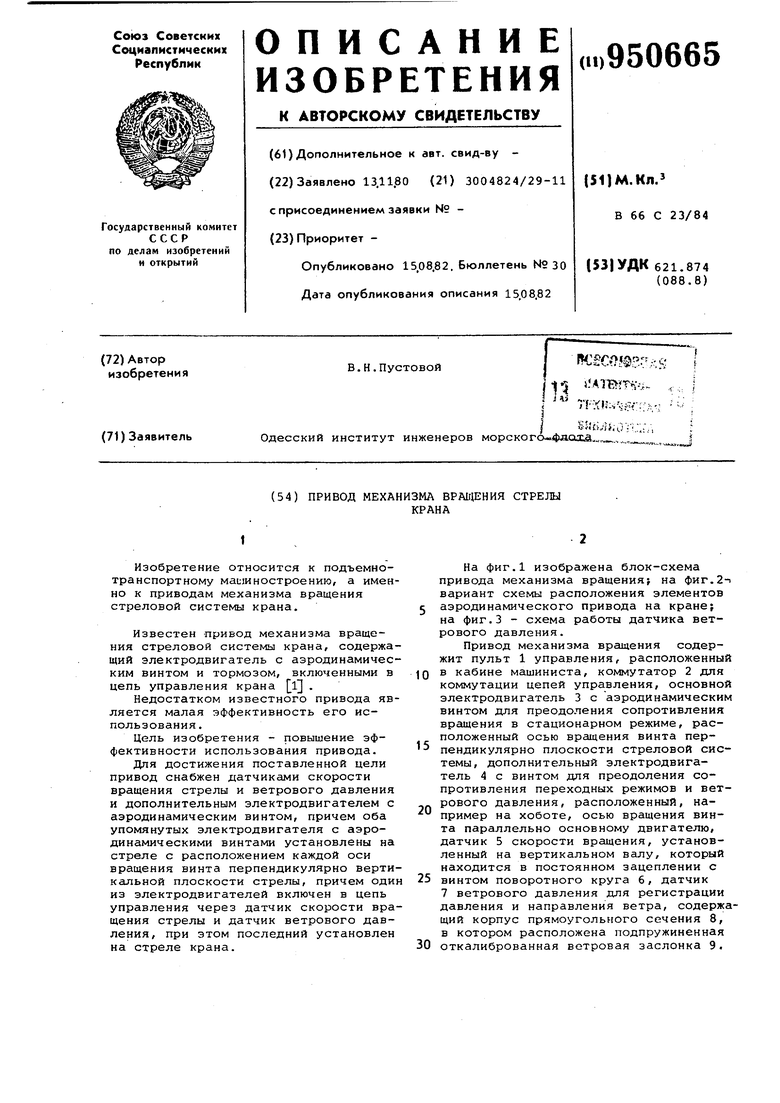
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ СТАЦИОНАРНОГО БАШЕННОГО КРАНА | 2010 |
|
RU2426684C1 |
| Способ повышения безопасности и система безопасности стрелового грузоподъемного крана | 2018 |
|
RU2700312C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ БАШЕННЫХ КРАНОВ ОТ ОПРОКИДЫВАНИЯ | 2012 |
|
RU2542850C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| Электромеханический ограничитель грузоподъемности стреловых кранов | 1957 |
|
SU112300A1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| КРАН | 2015 |
|
RU2671430C2 |