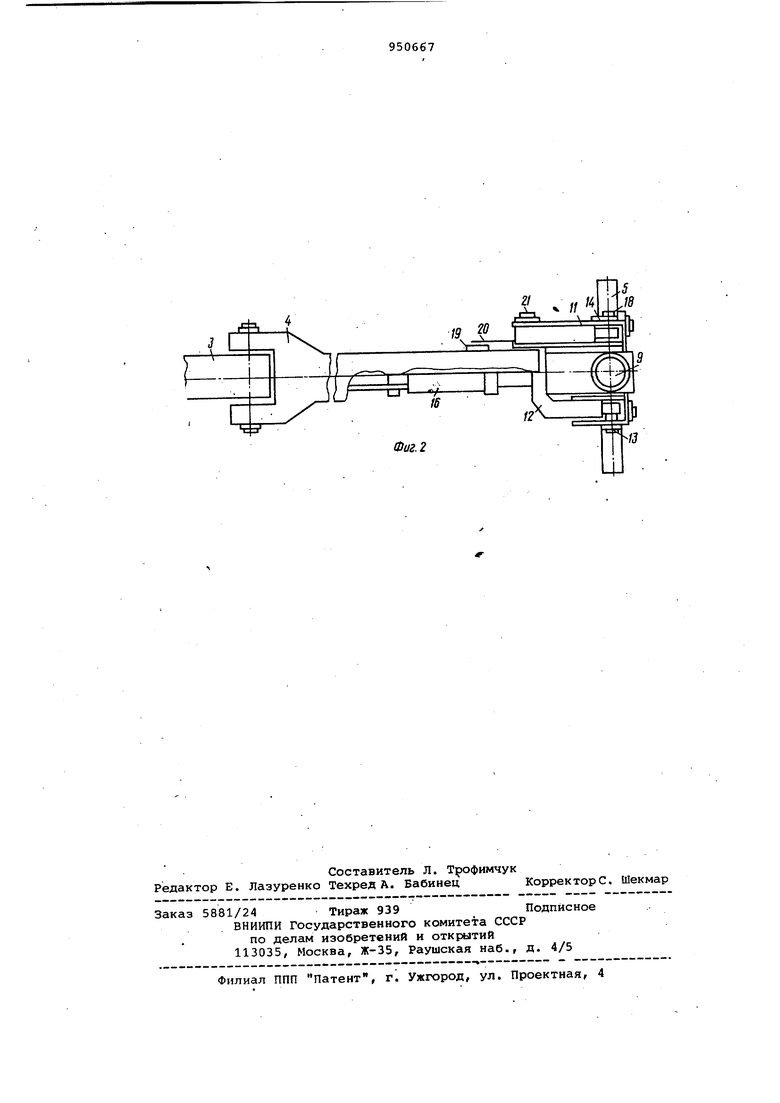
рычагом 12 и имеют возможность вращаться на оси 21 рукояти 4 и на осях 13 и-14 траве-рсы 15 посредством сило вого гидроцилиндра 16 и взаимодействуют с упорами 17 и 18 траверсы 15 Указатель положения упоров состоит из шкалы 19, укрепленной на рукояти, и стрелки 20, связанной с упором. Вариант конструктивного выполнения устройства на фиг. 3 и 4 является предпочтительным, когда устройство снабжается сменным рабочим оборудэва нием, например, экскаваторным ковшом В ней предусматривается использование одного гидроцилиндра для поворота ковша и П-образного рычага. Устройство работает следующим образом. Предварительно визуально определяют высоту, на которой необходимо будет производить разгрузку и, пользуясь указателем положения, устанавливают упоры 10 и 11 с помощью гидроцилиндра 16 в нужное положение. Далее путем поворота поворотной рамы манипуляциями со стрелой и рукоятью подводят захват к бревну, располагая его так, чтобы центр тяжести был смещен в сторону от гребенки примерно на один метр, и с помощью гидроцилинд ра 8 производят зажим дерева. Манипуляциями со и рукоятью, разноротом поворотной рамы и челюстного захвата укладывают дерево в требуемом месте. В тех случаях, когда дерево оказывается за пределами зоны обслужи вания, с помощью гидроцилиндра 16 производят перемацение П-образного рычага, увеличивая тем самым вьшет Захвата до требуемого, чтобы произвести захват дерева. В последующем производят подтягивание захваченного дерева. Для этого, включив гидроцилиндр стрелы 6 на подъем, а гидроцилиндр П-образного рычага на обратное движение, осуществляют поворот бревна вокруг опираемого конца до тех пор, пока указатель положения упоров не займет положение, соответствующее высоте разгрузки. Прекратив перемещение гидроцилиндра 16, продолжают подъем дерева до высоты разгрузки. Поворотом поворотной рамы и манипуляциями со стрелой и рукоятью производят разгрузку дерева в требуемом месте. Благодаря тому, что захват установлен на конце П-образного.рычага, управляемого гидроцилиндром, становится возможным увеличить при необходимости вылет захвата на уровне стоянки, расширить зону обслуживания и повысить эффективность устройства на погрузке деревьев. Формула изобретения Устройство для погрузки длинномерных изделий по авт. св. 529940, отличающееся тем, что, с целью повышения эффективности его использования путем увеличения вылета захвата, последний ,шарнирно-укреплен на конце П-образного рычага. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 529940, кл. В 25 J 5/00, 1976,
.IS
Л . 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки длинномерных изделий | 1974 |
|
SU529940A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ДЕРЕВЬЕВ | 1966 |
|
SU214227A1 |
| УСТРОЙСТВО для ПОГРУЗКИ ДЕРЕВЬЕВ | 1973 |
|
SU375054A1 |
| УСТРОЙСТВО для ПОГРУЗКИ ДЕРЕВЬЕВ' .'•-..•• ; i М^-'' •. „-'C-'w^ .<• ,- 1' •••^ll.i | 1972 |
|
SU328996A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Механизм поворота ковша погрузочной машины | 1979 |
|
SU868009A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| ВАЛОМНО-ПОГРУЗОЧНАЯ СТРЕЛА | 1965 |
|
SU170239A1 |
| Грузоподъемное устройство | 1988 |
|
SU1562298A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |