Изобретение относится к вычислительной технике и предназначено для построения на его основе специализированной ЦВМ.
Известны устройства, предназначенные для решения задач, содержащих большое количество тригонометрических величин. Эти устройства содержат регистры, сумматоры-вычистатели и коммутаторы и реализуют известны алгоритм Волдера: операции поворота вектора на плоскости Ll.
Недостатком таких устройств является необходимость компенсации деформации дополнительными преобразователями после операции или предварительной деформации вектора с коэффициентом 1/к до операции.
Наиболее близким по функциональным возможностям является устройство поворота вектора, состоящее из регистров, коммутирующих блоков и сумматоров-вычитатёлей 12.
Недостатком известного устройства является деформация на каждой итерации длины вектора.
Цель изобретения - повышение быстродействия устройства за счет регшизации операции поворота вектора с
одновременной коррекцией на каждой итерации деформации длины вектора.
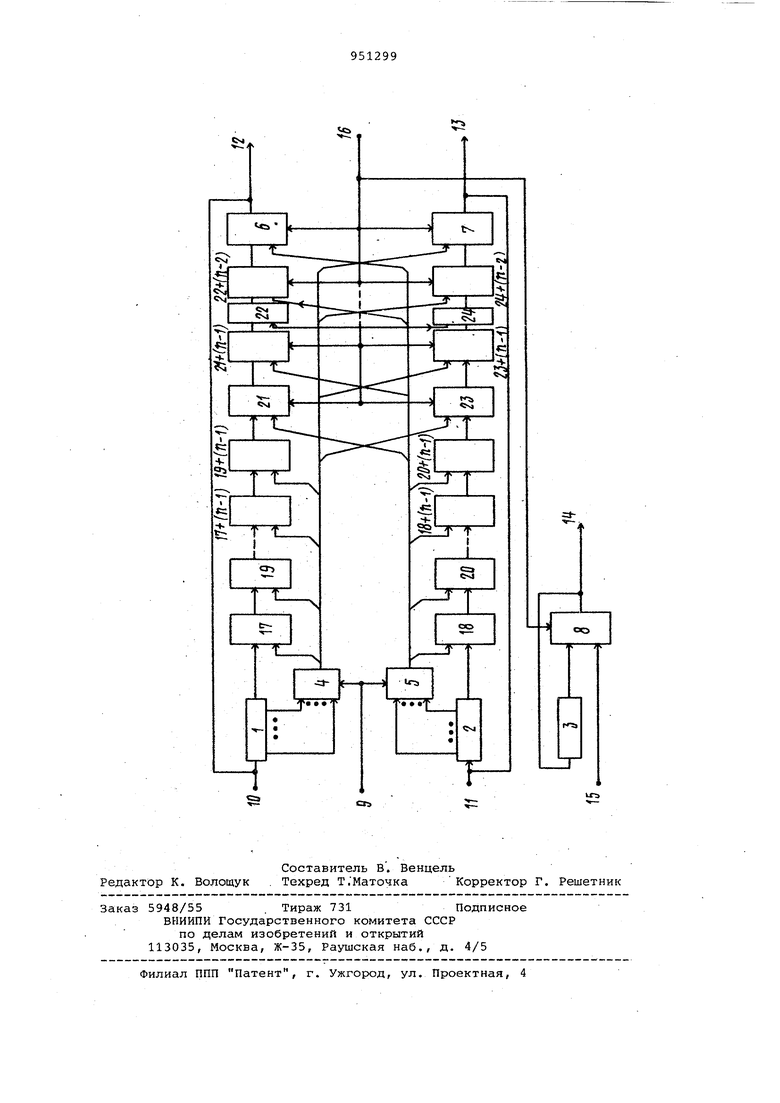
Поставленная цель достигается тем, что устройство для поворота вектора с коррекцией, содержащее первый, второй и третий регистры, первый и второй сдвигатели, первый, второй и третий сумматоры-вычитатели, причем разрядные выходы первого и второго регистров соединены с информационными входам и соответственно первого и второго сдвигателей, управляющие входы которых соединены с входом номера итерации устройства, первый и второй информационные, входы устройства соединены с входами соответственно первого и второго регистров, выходы первого И второго сум аторов-вычитателей соединены с входами соответствующих регистров, первый, второй и третий выходы устройства соединены с выходами-соответственно первого., второго и третьего сумматоров-вычитатёлей, выход третьего сумматора-вычитателя соединен с входом третьего регистра, выход которого соединен с первым входом третьего сумматора-вычит.ателя, второй вход которого сое- динен с третьим информационным входом устройства, управляющие входы первого, второго и третьего сумма торов-вычитателей соединены с входом знака устройства, дополнительно содержит первую и вторую группы по п сумматоров, первую и вторую гру пы по п вычитателей и первую и втору группы по (2п-1) сумматоров-вычитате лей, причем выход первого регистра соединен с первым входом первого вычитателя первой группы, выход i-ro вычитателя первой группы (i-1 , . .-. ,п) соединен с первым входом i-ro сумматора первой группы, Еыход п-го сумматора первой группы соединен с первым входом первого сумматора-вычитателя первой группы, выход i-ro сумматора-вычитателя первой группы соединен с первым входом (i-1)-го сумматора-вычитателя первой группы, выход (2п-1)-го сумматора-вычитателя первой группы соедин-ен с первым входом первого сумматора-вычитателя, выход второго регистра соединен с первым входом первого вычитателя второй группы, выход i-ro вычитателя второй группы соединен с первым входом i-ro сумматора .второй .группы, выход п-го сулшатора/f-второй группы соединен с первым входом вто рого сумматора-вычитателя второй группы, выход п-го сумматора-вычитателя второй группы соединен с пер вым входом (i-1)-го сумматора-вычи-тателя второй группы, выход (2п-1)сумматора-вычитателя второй группы соединен с первым входом второго су матора-вычитателя , выход первого сдвигателя соединены с вторыми входами сумматоров первой группы, вычитателей первой группы, сула 1аторов в читателей второй группы и второго сумматора-В1лчитателя выходы второг сдБигателя соединены с вторыми входами сумматоров второй группы, вычи тателей второй группы, сумматоров-в читателей первой группы и первого сумматора-вычитателя, управляющие входы сумматоров-вычитателей первой и второй групп соединены с входом знака устройства. Поворот вектора на Кс1ждой итерации производится.на угол, соответст вующий 2vf, в этом случае .коэффицие имеет вид: - -;-:5Устройство позволяет получить на каждой итерации истинное значение координат вектора. Оно работает в соответствии со с.ледующиг и выражени -i+l -4i+-t-l+l X--(УГ V2- Ч..-) V -,.,a.-) (,,l- V--|®i- ®n- 2V,.. .- Ha чертеже показана структурная схема устройства. Устройство содержит регистры 1, 2 и 3, сдвигатели 4 и 5, первый, второй и третий cyм aтopы-вычитaтeли б, 7 и 8 первый и второй управляющие входы устройства 9 и 16, первый, второй и третий информационные вхо ды устройства 10, 11, 15, первый, второй и третий выходы устройства 12, 13 и 14, первую группувычитателей 17-17+(n-1)j .вторую группу вычитателей 18-18+(n-l), первую группу сумматоров 19-19+(п-1), вторую группу .сумматоров 20-20+(п-1), первую группу сумматоров-вычитателя 21-21+(п-1), 22-22+(п-1), вторую группу сумматоров-вычитателей 2323+(п-1) , 24-24-(п-2)-. | Выходы регистров 1 и 2 соединены с первыми входами соответственно вычитателей 17 и 18, выходы вычитателей 17 и 18 соединены с первыми входами сумматоров 19 и 20 и т.д., выходы вычитателей 17н-(п-1) и 18+ +(п-1) соединены с первыми входами сумматоров 19+(п-1) и 20+(п-1), выходы которых соединены с первыми входами соответственно сумматороввычитателей 21 и 23, сумматоров-вычитателей соединены с .первыми входами следующих соответствующих сумматоров-вычитателей и т.д. до сумматоров- эычитателей 22+(п-2) и (24+(п-2), выходы которых соединены с входами соответствующих сумматороввычитателей 6 и 7. Входы регистров 1 и 2 соединены с входами устройства 10 и 11. Разрядные выходы регистров 1 и 2 соединены с входами сдвигателей 4 и 5, выходы сдвигателя 4 соединены с вторыми входс1ми вычитателей 17-17+(п-1) сумматоров 19-19+(п-1), сумматоров-вычитателей 21, 22,..., 21+(п-1), 22+(п-2), выходы сдвигателя 5 соединены с вторыми входами вычигателей 18-18+(п-1), сумматоров 20-20+(п-1), сумматоров-вычитателей 23,24,..., 23+(п-1), 24-(п-2). Выход регистра 3 соединен с первым входом сумматора-вычитателя 8, второй вход которого соединен с входом устройства 15. Выход сумматора-вычитателя 8 соединен с входом регистра 3 и с выходом устройства 14. Вход устройства 16 соединен с управляющими входами всех сумматоров-вычитателей. Вход устройства 9 соединен с управляющими входами сдвигателей 4 и 5. Устройство работает следующим образом. Перед началом работы в регистры 1 и 2 заносятся значения исходных координат вектора X и Y, а в регистр 3 значения угла поворота. С началом очередной i-ой итерации значения Y подаются с выходов регистров 1 и 2 в вычитатели 17, 18 и с разрядных выходов подаются в соответствующие сдвигатели,с выходов которых снимаю ся все значения координат, сдвинуты в соответствии с выражениями (2). Они предусматриваются в соответстви с выражением (2) к значениям, и Y (Для этого служат две группы по п вы читателей, две группы по п сумматор и две группы по (2п-1) сумматоров-в читателей. По входу 15 подается зна чение конатанты 2f, которое суммиру ся в сумматоре-вычитателей 8 с текущим значением B-t-i . По величине в , -которая по выходу 14 подается в устройство управления, определяет ся значение -4. / используемое на (1-1)-ой итераций для управления ра ботой сумматоров-вычитателей. Проце повторяется до определенного количества итераций или до достижения определенной точности в соответствии с 6 . в конце операции искомые координаты снимаются с выходов 12 ,и 13. Эффективность изобретения заключается в сокращении времени вычислений за счет устранения необходимости выполнять операцию умножения для компенсации деформации длины вектора, причем дополнительный расх оборудования незначителен, так как практически п. не превышает трехчетырех. Формула изобретения Устройство для поворота вектора с коррекцией, содержгицее первый, второй и третий регистры, первый и второй-коммутаторы, первый, второй и третий сумматоры-вычитатели, причем разрядные выходы первого и второго регистров соединены с информационными входами соответственно первого и второго сдвигателей, управляющие входы которых соединены с входом номера итерации устройства первый и второй информационные входы которого соединены со входами соответственно первого и второго ре гистров, выхо первого и второго сумматоров-вычитателей соединены со входами соответствующих регистров, первый, второй и .третий выходы устройства соединены с выходами соответственно первого, второго и треть го сумматоров-вычитателей, выход третьего сумматора-вычитателя соеди нен со входом третьего регистра вы ход которого соединен с первым йход третьего сумматора-вычитателя, втор вход которого соединен с третьим ин формационным входом устройства. управляющие входы первого, второго и третьего сумматоров-вычитателей соединены со входом знака устройства, отличающееся тем, что, с целью повышения быстродействия устройства за счет устранения операции компенсации деформации длины вектора, устройство дополнительно содержит первую и вторую группы по и сумматоров, первую и вторую группы по И вычитателей и первую и вторую группы по 2 и -1 сумматороввычитателей, причем выход первого регистра соединен с первым входом первого вычитателя первой группы, |выход -f -го вычитателя Л где i -1, . . .., у,; первой группы соединен с первым входом i-ro сумматора первой группы, выход и-го сумматора первой группы соединен с первым входом первого сумматора-вычитателя первой группы, выход 1-го сумматоравычитателя первой группы соединен с первым входом (i+ сумматоравычитателя первой группы, выход : (2и-1) -го сумматора-вычитателя первой группы соединен с первым входом первого сумматора-вычитателя, выход второго регистра соединен с первым входом первого вычитателя второй группы, выход -t-ro вычитателя второй группы соединен с первым входом -)-го сумматора второй группы, выход 1 -го сумматора второй группы соединен с первым входом второго сумматорагвычитатела второй группы, выход -i -го сумматора-вычитателя вторОй группы соединен с, первым входом C-i +1) -го сумматора-вычитателя второй группы, выход (2и-1)-го сумматоравычитателя второй группы соединен с первым входом второго сумматоравычитателя , ВЫХОДЫ первого сдвигателя соединены со вторыми входами сумматоров первой группы,.вычитателей первой группы, сумматоров-вычиталелей второй группы и второго сумматора-вычитателя, выходы второго сдвигателя соединены сю вторыми входами cyNMaTopOB второй группы, вычитателей второй группы, сумматороввычитателей первой группы и первого сумматора-вычитателя, управляющие входы сумматоров-вычитателей первой и второй групп соединены со входом знака устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 445042, кл. G Об F 7/38, 1972. 2.Парини. Система ДИВИК для режима сложных задач.- Электроника 1966, 18, с. 30-36 (прототип).
См


| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU868753A1 |
| Цифровой гармонический анализатор | 1979 |
|
SU873148A1 |
| Устройство для вычисления направляющих косинусов вектора в пространстве | 1982 |
|
SU1164700A1 |
| Вычислительное устройство для поворота вектора | 1979 |
|
SU857979A1 |
| Устройство для выполнения преобразования координат | 1987 |
|
SU1462299A1 |
| Конвейерное устройство для вычисления гиперболических функций | 1981 |
|
SU1026141A1 |
| Арифметическое устройство | 1979 |
|
SU796844A1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Устройство для поворота вектора | 1983 |
|
SU1144104A1 |
| Устройство для вычисления квадратного корня | 1986 |
|
SU1397904A1 |