(54) ЗАХВАТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сбора плодов | 1980 |
|
SU886815A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
| Устройство для сбора плодов | 1980 |
|
SU882471A1 |
| Хроматограф для анализа примесей в газах | 1989 |
|
SU1716433A1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ВСТАВОК ИЗ ПОДПЯТНИКОВ НАДРЕССОРНЫХ БАЛОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289500C1 |
| Машина для сбора плодов | 1983 |
|
SU1140710A1 |
| УСТРОЙСТВО ДЛЯ ЗАБРОСА ПТИЦ И ДРУГИХ ПОСТОРОННИХ ПРЕДМЕТОВ ПРИ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2452931C1 |
| Способ отверждения отдельных участков заготовки верха обуви и устройство для его осуществления | 1990 |
|
SU1814864A1 |
1
Изобретение относится к сельскому хозяйству, а именно к устройствам для уборки плодов путем механического воздействия на них.
Известен захват, содержащий установленный на основании корпус, на котором размещень пустотелые пальцы с гибкой нерастягивающейся пластиной и систему подачи в полости пальцев сжатого воздуха.
Недостаток известных захватов - низкая эффективность при использовании их на отрыве плодов.
Цель изобретения -.повышение эффективности отрыва плодов.
Эта цель достигается тем, что корпус имеет криволинейную направляющую и закреплен на основании шарнирно, причем основание снабжено пневмоцилиндром, на штоке которого установлен шаровой щарнир, размещенный в направляющей, а на внешних сторонах пальцев имеются ребра жесткости.
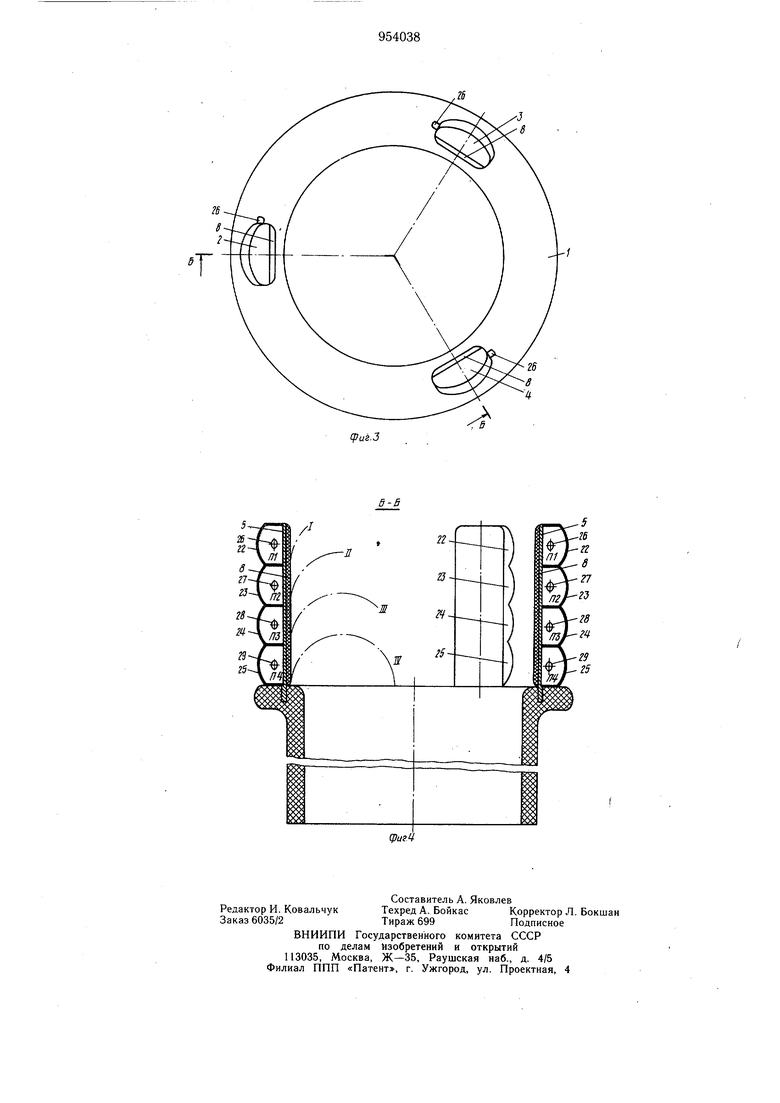
На фиг. 1 изображен рабочий орган, горизонтальная проекция; на фиг. 2 - сечение А-А на фиг. 1; на фиг. S - видоизмененный рабочий орган, горизонтальная проекция; на фиг. 4 - сечение на фиг. 3.
Рабочий орган устройства для уборки плодов состоит из подвижного корпуса 1, на котором закреплены захваты 2-4, выполненные в виде упругих пластин 5, соединенных с гибкими пальцами 6 J-образного поперечного сечения, выполненными из эластичного материала (фиг. 1). Ребра жесткости 7 пальцев 6 предупреждают их раздувание в плоскости, перпендикулярной осям пальцев. Пружинные пластины 5, с целью увеличения зоны контакта захватов 2-4
10 с плодом и уменьшения давления захватов 2-4 на плод, покрываются накладками 8, выполненными из мягкого материала, например, из губчатой резины. Пластины 5 соединены со штуцерами 9, посредством которых захваты 2-4 жестко соединены с корпусом, а их внутренние полости с кольцевь1М воздуховодом 10. Воздуховод 10 через патрубок II соединен с компрессором (не показан).
Корпус 1 может соверщать возвратно-пос20тупательное движение по направляющей трубе 12. С целью уменьшения тргния в паре корпус 1 направляющая труба 12, внутренняя поверхность 1 соединена с, цилиндрической втулкой 13, а внешняя поверхность lUinpaB.ifiiouefl трубы 12 соединена с цилиндри;сч-кой вту.:|К(1Й 4. Втулки 13 и 14 обрачуют антифрикционную пару. К направ; яющей трубе 12 крепится пневмоцилиндр 15, iiJTOK 16 которого заканчивается luapoBbiM шарниром. Шарик 17 зафиксирован в губка.х 18 и 19, соединенными с корпусом 1. Губки 18 и 19 выполнены в ;еполиого витка винтовой линии, направленной по внешней цилиндрической поверхности корпуса 1. Пневмоцилиндр 15 посредством штуцеров 20 и 21 соединен с системой питания устройства сжатым воздухом, обесг1ечиваюш,ей возвратно-поступательное движение штока. Другой вариант захвата (фиг, 3-4) выполнен в виде корпуса 1, на котором закреплены захваты 2-4, включающие пружинные пластины 5, к которым присоединены секцин 22 - 25, выполненные из эластичного материала, и образуюш,йе с поверхностью пластин 5 полости П1, П2, ПЗ и П4, которые посредством штуцеров 26-29 соединены с системой питания устройства сжатым воздухом. Нижние концы пластин 5 зашемлен,: в корпусе 1. Пружинные пластины 5, с пс.ьью увеличения зоны контакта захватов 2 4 и плода и уменьшения давления .атов на плод, соединяются с накладкаvM 8, выполненными из мягкого материала ;и(Ч)имср, 1убчатой резины. Захват работает следуюц им образом. , обслуживающий устройство, исъчводп.г его рабочий орган к плоду таким ,M, чтобы плод попал в рабочую зону рабочего органа устройства между захват, 24. После подведения рабочего орг;;н;: устройства к плоду оператор кнопкой 1-.к.лк)чает подачу сжатого воздуха через патfiyuoK 1 и кольцевой воздуховод 10 в полости захватов 2-4. По мере возрастания ..;|ения стенки пальцев 6 начинают раздаваться, а их гребенчатые части удлиняются. В результате того, что часть боковой поверхности захватов 2-4 выполнена в виде пластин 5, не могут изменять свою длину захваты 2-4 изгибаются и об хватывают . Одновременно с подачей сжатого воздуха; ;:; полостк захватов 2-4, сжатый воЗхТ,ух подается через штуцер 20 в штоковую полость пневмоцплиндра 15. Под действием силы давления воздуха на поршень пневмоциличлра 15 шток 16 и закрепленный на нем luapiiK 17 начинает перемещаться вниз. Шарик 17 действует на внутреннюю поверхность винтовой направляющей губки 18 с силой, направленной по нормали к ее поверхности. Под действием вертикальной составляющей нормальной силы корпус 1 с закрепленными на нем захватами 2-4 перемеп1ается вниз, а горизонтальная составляющая нормальной силы поворачивает корпус 1.. В результате этого на плодоножку п,г1ода кроме растягивающего усилия действует крутящий момент, скручивающий плодоножку, и плот обрывается. После обрыва оператор переключает подачу сжатого воздуха через штуцер 21 в безщтоковую полость пневмоцилиндра 15, а полости захватов 2-4 соединяет с атмосферой. При этом щток 16 и закрепленный на нем щарик 17 перемещаются вверх, перемещая вверх корпус 1, Одновременно с этим пластины 5 захватов 2-4 под действием сил упругости выпрямляются, захваты 2-4 занимают вертикальное положение, и рабочий цикл устройства повторяется. Другой вариант захвата работает следующим образом. Оператор, обслуживающий данное устройство, подводит его рабочий орган (фиг, 3-4) к плоду таким образом, чтобы плод попал в рабочую зону рабочего органа устройства. После подведения рабочего органа к плоду оператор включает подачу сжатого воздуха через щтучер 26 в полости П1, По мере возрастания давления в полости П1 стенки секций 22 раздуваются, изменяют длину, и захваты 2-4 изгибаются. Пружинные пластины 5 захватов 2-4 после подачи -сжатого воздуха в полости П1 займут положение I (фиг, 4). При последовательной подаче сжатого воздуха в полости П2, ПЗ, П4 захваты 2-4 изгибаются, и пружины пластины 5 последовательно займут положение II 1П и IV (фиг. 4), При сгибании захватов 2-4 они захватывают плод, давят на него, перемещают в вертикальном направлении и обрывают. После обрыва плода,оператор соединяет полости П1, П2, ПЗ, П4 захватов 2-4 с атмосферой. Под действием сил упругости пластины 5 выпрямляются, захваты 2-4 занимают вертикальное положение. При подведении рабочего органа к плоду и подаче сжатого воздуха в полости П, П2, ПЗ, П4 его рабочий цикл повторяется. Захват для съема плодов прост по конструктивному выполнению, надежен в эксплуатации, высокопроизводетелен, не повреждает плодов, веток и листьев. Формула изобретения 1. Захват преимущественно для съема плодов, содержащий установленный на основании корпус, на котором размещены пустотелые пальцы с гибкой нерастягивающейся пластиной, и систему подачи в полости пальцев сжатого воздуха, отличающийся тем, что, с целью повышения эффективности отрыва плодов, корпус имеет криволинейную направляющую и закреплен на основании шарнирно, причем основание снабжено пневмоцилиндром, на штоке которого установлен шаровой шарнир, размешенньчг в направляющей. 2. Захват по п. 1, отличающийся тем, что на внешней стороне пальцев имеются ребра жесткости. № Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 737206, кл. В 25 J 15/00. 1977.
