1
Изобретение относится к обработке металлов давлением, в частности к оборудованию для высадки.
Известна горизонтально-ковочная машина с горизонтальным разъемом инструмента, в которой смонтированы высадочный механизм, включающий главный ,кр1ивошипный вал с подвижными опорами, и кривошипно-рычажный механизм заж-има заготовки со стяжными шатунами, связываюШИми зажимную скобу со станиной.
Недостатком известной машины является нагружение привода зажима усилием штамповки.
Цель предлагаемого изобретения - разгрузка механизма зажима заготовки в ироцессе штамповки.
Для этого машина снабжена дополнительной , кинематической связью между главным кривошипным валом и кривошиино-рычажньгм механизмом зажима заготовки, выполненной в виде смонтированного в опорах вала с кривошипом, связанным с шатуном, установленным на предусмотренном на главном криВошипном валу дополнительном кривошипе.
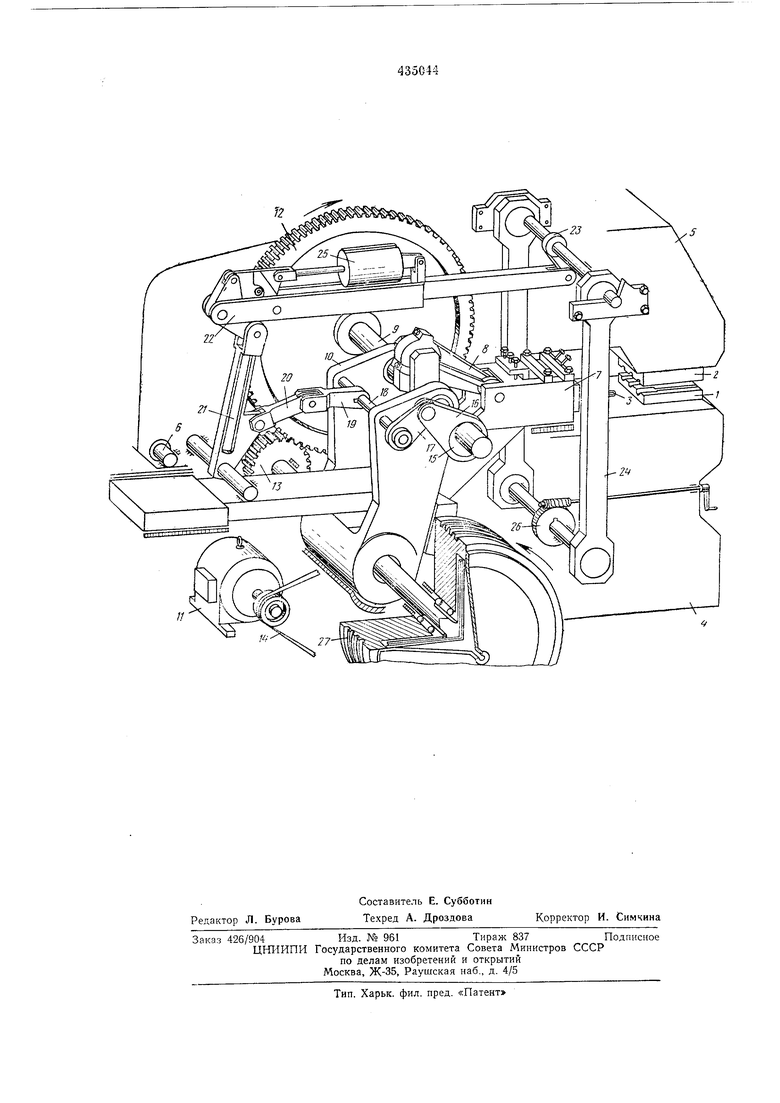
На чертеже изображена предлагаемая машина.
Она содержит неиодвиж,ную полуматрицу 1, подвижную полуматрицу 2 и пуансоны 3. Неподвижная полуматрица 1 закреплена в
станине 4. Подвижная полуматрица 2 установлена в зажимной скобе 5, которая шарнирно связана осью 6 со станиной 4 и совершает качательное движение относительно последней, смыкая и размыкая полуматрицы и 2. Пуансоны 3 установлены в высадочном ползуне 7, который совершает возвратно-поступательное движение, воздействуя на заготовку, введенную в разъем между полуматрицами и удерживаемую ими при смыкании. Ползун 7 приводится в движение шатуном 8 от главного кривошипного вала 9, который смонтирован в подвижных опорах 10 и кинематически связан с электродвигателем 11 посредством зубчатой пары 12 и 13 и «линоременной передачи 14. Зажимная скоба 5 получает движение от кривошипного вала 9 посредством кривошипно-рычажного привода, который приводнится от предусмотренного на главном Кривошипном валу доиол.нительного кривошипа 15, шатуна 16, кривошипа 17, шарнирно связанного с шатуном 16. Кривошип 17 выполнен на валу 18, смонтированном в опорах 10. Вал 18 связан с рычагом 19, который через
серьгу 20, рычаг 21, тягу 22 шарнирно связан с рычагом 23. Рычаг 21 имеет ось качания, заделанную в станине 4. Рычаг 23 имеет ось качания, заделанную в зажил1ной скобе 5. Кроме того, рычаг 23 шарнирно связан с шатуном 24, имеющим ось качания, заделанную в
станине 4. Тяга 22 несет на себе предохранительное устройство 25 от перегрузки, пружинно-рычажного типа шИроко распространенной конструкции. Червячный механизм 26 регулирует веллчи.ны напряженности в системе зажима матриц.
Машина работает следующим образом.
Движение от электродвигателя // передается через клиноременную передачу 14, махов ик-муфту включения 27, зубчатую пару 12, 13 главному кривошипному валу 9, который .передает движение одновременно ползуну 7 через шатун 8 и зажим.ной скобе 5 посредством кри-вошипа 15, шатуна 16, кривошипа 17, вала 18 и систему рычагов 19-23 и шатун 24. Смыкаются полуматрицы 1 и 2 и зажим заготовки, предварительно введенный в их разъем. Пр.и дальнейшем вращении вала 9 ползун 7 пуансонами 3 производит необходимую работу по формообразованию заготовки, удерживаемой полуматрицам.и. В многопозиционных лолуматрицах могут на.ходиться одновременно одна или несколько заготовок. В процессе штамловки усилие через ползун 7, шатун 8 вал 9 передается подвижным опорам 10, которые передают усилие штамповки на механизм зажима системой рычагов 19-23 и шатуна 24. образом, усилие штамповки непосредственно в процессе штамповки воспривимается механизмом зажима и препятствует раскрытию матриц в случае нарушения стабильности технологического процесса. Передаточное отношение рычажной системы привода зажйма может быть подобрано таким образом, чтобы обеспечить наперед заданное соотношение между усилием высадки и зажима. Это значительно повысит точность и качество поковок, получаемых на ГКМ. Усилие штаМПовки подвижными опорами передается на механизм зажима, минуя кривоШ1ип 15, шатун 16. Это значительно повышает надежность И долговечность крдвош ипного механизма. Кроме того, поскольку рычажная система привода зажима воспринимает усилие штамповки, то предохранительное устройство 25 одновременно служит предохранителем по усилию
штамповки и по усилию зажйма.
При дальнейшем вращении вала 9 ползун 7 с пуансонами 3 отходит назад, кривошип 15, воздействуя через шатун 16 на кривошип 17 и далее через вал 18 и систему рычагов 19-
23 и шатун 24 раскрывает полуматрицы / и 2, оовоболсдая заготов;ку, которая переносится из ПОЗИЦИ1И в позицию, и цикл повторяется.
Предмет изобретения
Горизонтально-ковочная машина, содержащая станину, в которой смонтированы высадочный .механизм, включающий главный кривошипный вал с подвижными опорами, и кривоши:пно-рычажный механизм зажима заготовки со стяжными шатунами, связывающими зажимную скобу со станиной, отличающаяся тем, что, с целью разгрузки механизма зажима заготовки в процессе штамповки, она снабжена дополнительной кинематической связью между главным кривоши/пным валом и кривошипно-рычажным механизмом зажима заготовки, выполненной в виде смонтированного в опорах вала с кривошипом, связанным с шатунами, установленным на предусмотренном на главном кривошипном валу дополнительном кривошипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Многопозиционное устройство для штамповки деталей | 1985 |
|
SU1228951A1 |
| Механический пресс | 1977 |
|
SU740526A1 |
| Горизонтально-ковочная машина | 1969 |
|
SU356879A1 |
| Высадочный двухударный автомат | 1977 |
|
SU635667A1 |
| Высадочный двухударный автомат | 1981 |
|
SU984604A2 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |