Изобретение относится к прокатке металлов, а именно к устройствам для подачи илиперемещения проката, и может быть использовано для кольцевой подачи слитков от нагревательных колодцев к обжимному стану, при «подаче слябов со склёша к методическим печам толстолистовых и широкополосных станов горячей прокатки, а также при кольцевой подаче рулонов.
Технологический процесс на современном прокатном стане связан с определенными транспортными операциями. В ряде случаев транспортировка заготовок или готового продукта осусдествляется с помощью тележек (слитковозов, слябовозов:, рулоновозов) , движущлхся по рельсовому пути. Челночная, т.е. возвратно-поступательная работа тележек, при которой в одну сторону тележка движется груженной,, а назад порожней, характери- зуетсй наличием только одной тележки на рельсовом пути и имеет ограни- ченные возможности обеспечения требуемой производительности прк значительном удалении места разгрузки от места загрузки и коротком ритме прокатки на высокопроизводительном прокатном стане, когда слитки(слябы,
рулоны) необходимо подавать друг за другом с малыми интервгшами. В этом случае целесообразным является применение схемл подачи заготовок (готового продукта), предусматривающей их транспортировку транспортными ;средставамя; движущимися по замкнутому кольцевому пути, причем количество транспортных средств на кольцевом
10 пути связано с необходимостью обеспечения заданного ритма прокатки на прокатнсм стане.
Известна система для кольцевой подачи слитков к приемному рольган15гу прокатного стана, содержащая транспортные тележки, движущиеся по кольцевому рельсовому , с непрерывной замкнутой линией троллеев. Питание якорей двигателей каждого
20 транспортного средства осуществляется от своего источника питания посредством кольцевых троллеев и токосъемного устройства, закрепленного к транспортному средству. При этом на
25 каком бы участке кольцевого рельсового пути не находилось транспортное средство, якорь его двигателя питается от своего источника и, таким образом,число якорных троллеев
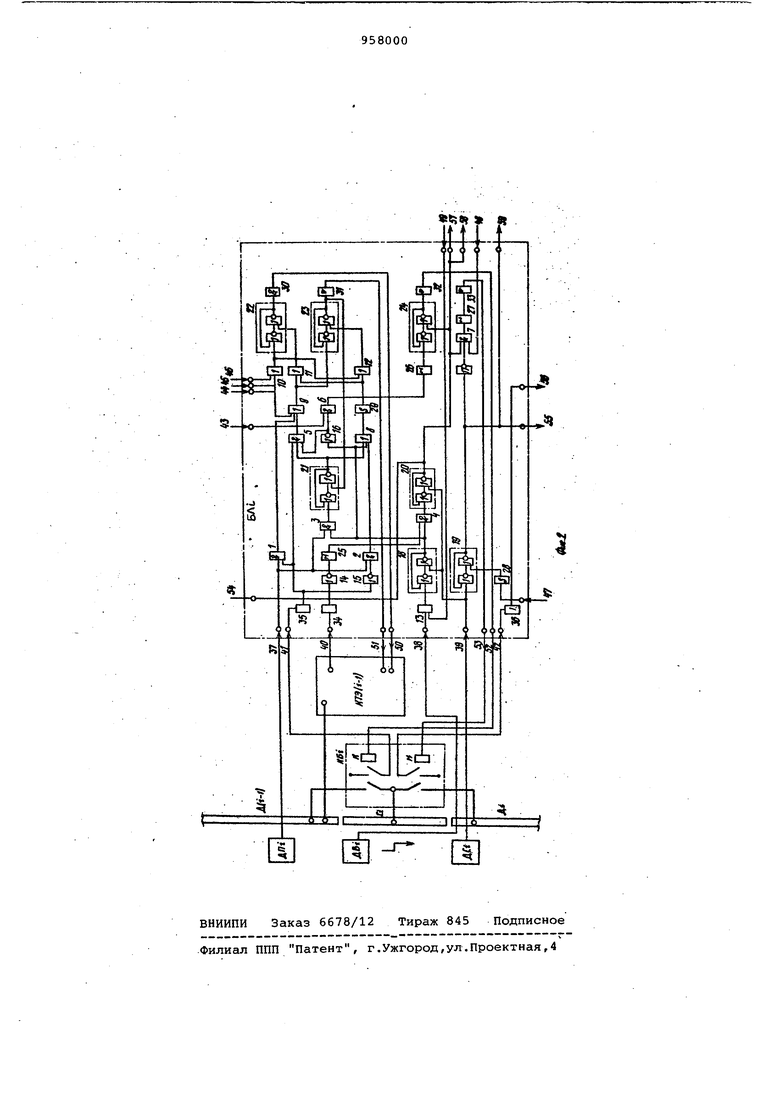
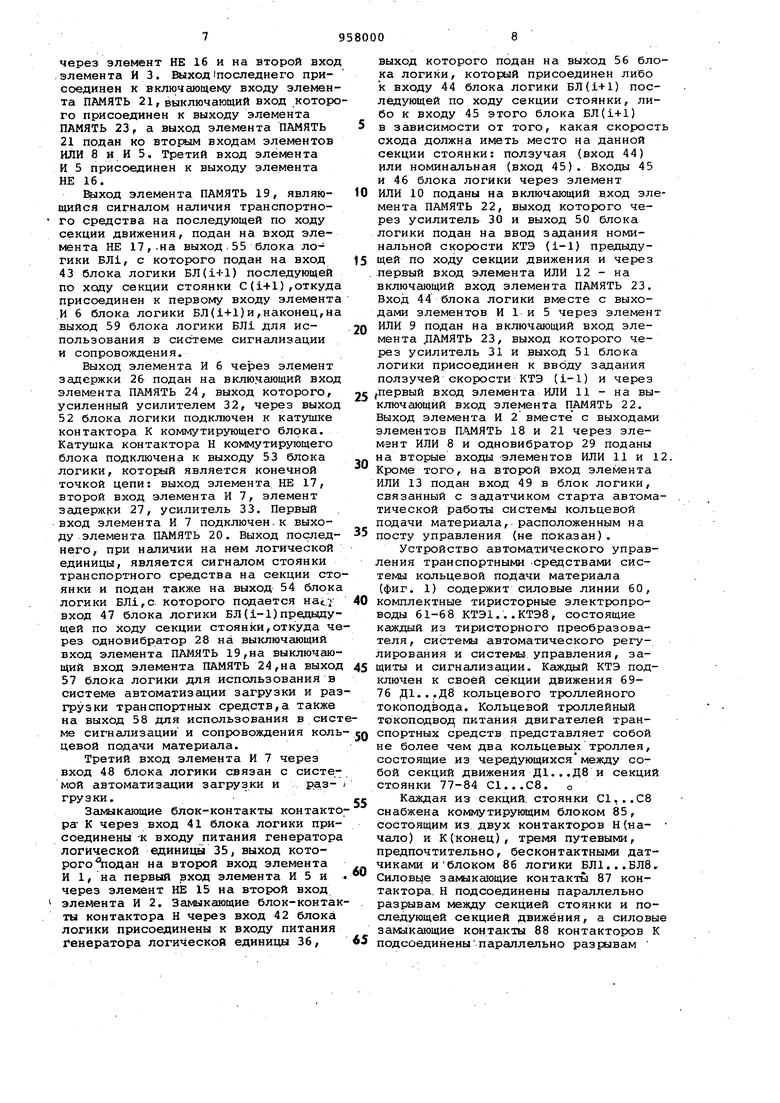
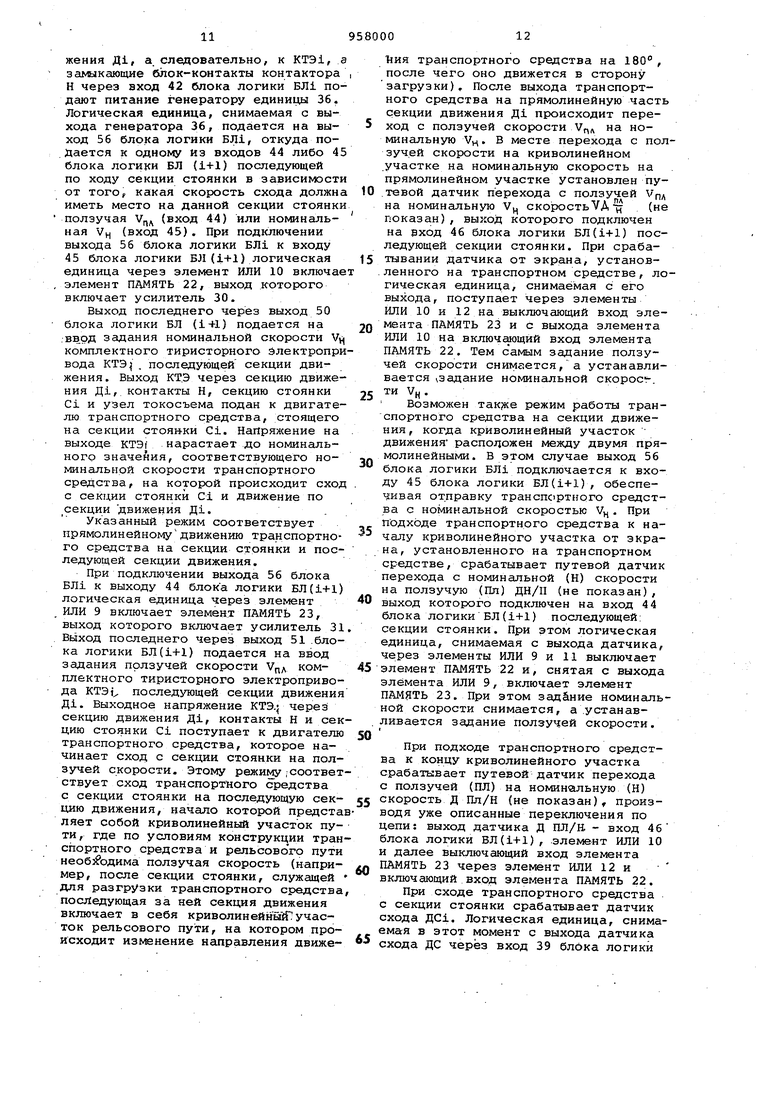
30 равно числу транспортных средств на , кольцевом пути плюс один троллей, общий для всех источников, принимаемый условно за минус 1. Однако по мере роста числа транспортных средств на кольцевом пути возрастает громоздкость, материгшоемкость и сложность конструкции трол лейных линий, снижается надежность и могут возрасти простои металлургического оборудования, вызванные частым выходом из строя троллеедержателей и токосъемников. В связи с этим возникает необходимость опознавания транспортного средства, находящегося на данном участке кольцево го пути, для управления скоростью этого транспортного средства путем подачи управляющего воздействия имен но на тот источник питания, -который питает двигатели этого транспортного средства. , Известно также устройство питания двигателей транспортных средств системы кольцевой подачи материала, . обеспечивающее питание двигателей транспортных средств не более чем через два якорных троллея при любом количестве транспортных средств на кольцевом пути. Кольцевые троллеи питания состоят из чередующихся секций движения, подключенных каждая к своему источнику питания, и секций стоянки, каждая из которых снабжена датчиком стоянки транспортного средства и коммутирующим блоком, состоящим из двух контакторов, которые коммутируют секцию стоянки и смежные с ней секции движения. При этом устройство содержит общий блок логики, входы которого соединены с выходами датчиков стоянки, а выходы - с катуш ками контакторов коммутирующих блоков. Количество секций стоянки равно количеству транспортных средств. Работа устройства заключается в одновременном подключении всех секций стоянки при наличии на них неподвижных транспортных средств к последующим по ходу секциям движения , а пр сходе всех транспортных средств с секцией стоянки последние одновремен но переключаются на предудущие по ходу секции движения до входа и остановки на всех секциях стоянки очередных транспортных средств. В указанном устройстве источники питания питают не двигатели конкретных транспортных средств, а определенные сек ции силовых троллеев, с которалх напряжение питания подается к двигателю того транспортного средства, коTopofe в данный момент находится в пределах этих секций. В этой связи необходимость в троллеях управления датчиках транспортного средства и блока дешифрации кодов отпадает, пос кольку устройство управления скоростью может быть построено без информации о транспортном средстве. В данном случае для системы электропривода и источника питания безразлично какое именнотранспортное средство находится на данном участке кольцевого .пути, поскольку питание подается на конкретные секции силовых троллеев, количество которых не более,двух. Управление скоростью для указанного устройства питания может быть решено путевыми датчиками, установленными на секциях кольцевых троллеев 2 . Если разбивка кольцевого пути на секции движения по каким-либо причинам выполнена так, что сход с одной из секций движения происходит в то время, как все остальные транспортные средства уже стоят на своих секциях стояйки, то все равно одновременное подключение этих секций стоянки к последующим по ходу секциям движения и отправка на них транспортных средств происходит Только после входа и полной остановки последнего транспортного средства на своей секции стоянки. Из этого следует, что если перед транспортным средством, стоящим на секции стоянки, освобождается последующая секция движения, то сход на нее возможен только после того, как освободятся все секции движения. Если загрузка или разгрузка транспортного средства заканчивается раньше, чем ожидалось, то оправка загруженного или порожнего транспортного средства все равно возможна после получения информации о наличии всех транспортных устройств на секциях стоянки. Одновременное подключение всех секций стоянки к последующим по ходу секциям движения и отправка на них транспортных средств возможно, если они стоят на всех секциях стоянки. Поэтому, если одно или несколько транспортных средств, например, из-за поломки удаляются с кольцевого пути, то для нормальной работы системы необходимо, чтобы либо вместо удаленных были установлены резервные транспортные средства, либо, если это возможно по условиям ритма подачи материала столько же секций стоянки, сколько удалено транспортных средств, должны подвергнуться следующим переключениям, предусмотренным при проектировании системы электропривода для возможности ее работы в аварийных режимах: разрывы между секцией стоянки и обеими примыкающкми к ней секциями движения должны быть Зсшкнуты; примы- . кающие к секции движения становятся одной удлиненной секцией движения, причем источник питания одной из этих секций движения отключается; сигналы, вызывающие оснастку транспортных средств на секции стоянки,отключаются; вход в общий блок логики от датчика стоянки отключенной секции стоянки заменяется входом от датчика стоянки последующей иЛи предыдущей секции стоянки по отношению к отключенной для получения в общем блоке логики информации о наличии или отсутствии транспортных средств на всех секциях стоянки. Наличие общего для всех секций блока логики, производящего.одновременные переключения, обуславливае жесткий централизованный характер работы известного устройства. Целью изобретения является повышение производительности систеьвл кольцевой подачи материала путем не зависимого автоматического управления каждым транспортным средством за счет обеспечения независимой отправки транспортного средства с одной секции на освободившуюся последующую секцию. Поставленная цель достигается тем что устройство управления транспортными средствами системы кольцевой подачи материала, содержащее комплеК ные тирйсторные электроприводы и кольцевой токоподвод питания двигателей транспортных средств, выполнен ный в виде не более двух кольцевых троллеев, состоящих из чередующихся секций движения, соединенныхкаждая к своему тиристорному электроприводу и секций стоянки, каждая из которых снабжена коммутирующим блоком, состо ящим из двух контакторов, соединенных с блоком логики, и путевыми датчиками входа и схода транспортного средства, каждая секция стоянки снаб жена своим блоком логики, входы кото рого присоединены к относящимся к этой секции стоянки путевым датчикам входа и схода и дополнительно устан ленному на предыдущей секции движения датчику подхода транспортного средства, а выходам блока логики присоединены к катушкам контакторов ком мутирующего блока этой секции стоянки и к входам управления скоростью комплектного тиристорно.го электропри вода предыдущей секции движения, при этом все блоки логики соединены между собой последовательно в единое замкнутое командно-информационное кольцо. На фиг. 1 показана однолинейная блок-схема устройства автоматическо го управления транспортными средствами систекы кольцевой подачи материала; на фиг. 2 - схема блока логики секции стоянкич. Устройство может быть реализовано при любом количестве транспортных средств на кольцевом пути, а следовательно, при любом числе пар секций движения и секций стоянки кольцевого троллейного подвода питания к двигателям транспортных средств. При этом количество транспортных средств на кольцевом пути равно или меньше количества секций стоянки. Блок логики (фиг. 2) содержит элементы И 1-7, элементы ИЛИ 8-13, элементы НЕ 14-17, элементы ПАМЯТЬ 18- ; 24, элементы задержки времени 25-27, одновибраторы 28 и 29, выходные усилители 30-33, пороговый элемент 34, и генераторы логической единицы 35 и 36. Блок логики имеет входы 37-39 от путевых датчиков подхода ДП, входа ДВ и схода ДС соответственно, 40 от комплектного тиристорного электропривода КТЭ (i-l) предыдущей по ходу секции движения,41 и 42 - от блок-контактов контакторов коммутирующего блока КБ, 43-45 - от блока логики ЕЛ (i - 1 )прёдыдущей по ходу секции стоянки, 46 от путевого датчика перехода с ползучей скорости на номинсшьную в случае его применения (не показан), 47 - от блока логики БЛ(1-1) последующей по ходу секции стоянки, 48 из системы автоматизации загрузки и разгрузки транспортных средств/ 49 от задатчика старта автоматической работы системы кольцевой подачи материала на посту управления системой (не показан).. , Блок логики имеет выходы 50 и 51 к вводам заданий номинальной и ползучей скорости КТЭ (i-l) соответственно, 52 и 53 - соответственно к катушкам контакторов К и Н,коммутирующего блока КБ1, 54 - к блоку логики БЛ(1-1) предыдущей по ходу секции стоянки 55 и 56 - к блоку логики БЛ(1+1) последующей по ходу секции стоянки, 57 - в систему автоматизации загрузки и разгрузки, 58 и 59 - в систему сигнализации и сопровождения кольцевой подачи материала. -о Вход 37 блока логики подан на первые входы каждого из элементов И 1-3, вход- 38 блока логики через элемент ИЛИ 13 подан на включающий вход элемента ПАМЯТЬ 18, а вход 39 - на включающий вход элемента ПАМЯТЬ 19 и одновременно на выключающие входы элементов ПАМЯТЬ 18 и 20. Последний своим включающим входом через элемент И 4 по одному его входу присоединен к выходу элемента ПАМЯТЬ 18, а по другому входу - с датчиком ЭДС комплектного тиристорного электропривода предудущей секции движения по последовательной цепи: вход 40 блока логики, пороговый элемент 34, элемент НЕ 14, элемент задержки 25. Кроме того, выход элемента ПАМЯТЬ 18 подан на один вз входов элемента или 8, на второй вход элемента И 6 через элемент НЕ 16 и на второй вход -элемента ИЗ. Выход 1последнего присоединен к включающему входу элемента ПАМЯТЬ 21, выключающий вход которо го присоединен к выходу элемента ПАМЯТЬ 23, а выход элемента ПАМЯТЬ 21 подан ко вторым входам элементов ИЛИ 8 и И 5, Третий вход элемента И 5 присоединен к выходу элемента НЕ 16. Вйход элемента ПАМЯТЬ 19, являющийся сигналом наличия транспортного средства на последующей по ходу секции движения, подан на вход элемента НЕ 17,.на выход,55 блока логики БЛ1, с которого подан на вход 43 блока логики БЛ(И-1) последующей по ходу секции стоянки С(i+1),откуда присоединен к первому входу элемента .И 6 блока логики БЛ(1+1)и,наконец,на выход 59 блока логики БЛ1 для использования в системе сигнализации и сопровождения. Выход элемента И б через элемент задержки 2& подан на включающий вход элемента ПАМЯТЬ 24, выход которого, усиленный усилителем 32, через выход 52 блока логики подключен к катушке контактора К коммутирующего блока. Катушка контактора И коммутирующего блока подключена к выходу 53 блока логики, который является конечной точкой цепи: выход элемента НЕ 17, второй вход элемента И 7, элемент задержки 27, усилитель 33. Первый вход элемента И 7 подключен.к выходу элемента ПАМЯТЬ 20. Выход последнего, при наличии на нем логической единицы, является сигналом стоянки транспортного средства на секции сто янки и подан также на выход 54 блока логики БЛ1,с. которого подается Hat.i вход 47 блока логики БЛ(1-1)предыдущей по ходу секции стоянки,откуда че рез одновибратор 28 на выключающий вход элемента ПАМЯТЬ 19,на выключающий вход элемента ПАМЯТЬ 24,на выход 57 блока логики для использования в системе автоматизации загрузки и ра грузки транспортных средств,а также на выход 58 Для использования в сис ме сигнализации и сопровождения коль ценой подачи материала. Третий вход элемента И 7 через вход 48 блока логики связан с системой автоматизации загрузки и разгрузки. Замыкающие блок-контакты контакто ра- К через вход 41 блока логики присоединены -к входу питания генератора логической единищ 35, выход которого одан на второй вход элемента И 1, на первый вход элемента И 5 и через элемент НЕ 15 на второй вход элемента И 2, Замыкающие блок-контак ты контактора Н через вход 42 блока логики присоединены к входу питания Генератора логической единицы 36, выход которого подан на выход 56 блока логики, который присоединен либо к входу 44 блока логики БЛ(1+1) последующей по ходу секции стоянки, либо к входу 45 этого блока БЛ(1+1) в зависимости от того, какая скорость схода должна иметь место на данной секции стоянки: ползучая (вход 44) или номинальная (вход 45). Входы 45 и 46 блока логики через элемент ИЛИ 10 поданы на включающий вход элемента ПАМЯТЬ 22, выход которого через усилитель 30 и выход 50 блока логики подан на ввод задания номинальной скорости КТЭ (i-1) предыдущей по ходу секции движения и через .первый вход элемента ИЛИ 12 - на включающий вход элемента ПАМЯТЬ 23. Вход 44 блока логики вместе с выходами элементов И 1 и 5 через элемент ИЛИ 9 подан на включающий вход элемента ДАМЯТЬ 23, выход которого через усилитель 31 и выход 51 блока логики присоединен к вводу задания ползучей скорости КТЭ (i-1) и через ,первый вход элемента ИЛИ 11 - на выключающий вход элемента ПАМЯТЬ 22. Выход элемента И 2 вместе с выходами элементов ПАМЯТЬ 18 и 21 через элемент ИЛИ 8 и одновибратор 29 поданы на вторые входы .элементов ИЛИ 11 и 12. Кроме того, на второй вход элемента ИЛИ 13 подан вход 49 в блок логики, связанный с задатчиком старта автоматической работы системы кольцевой подачи материала, расположенным на посту управления (не показан). Устройство автоматического управления транспортными .средствами системы кольцевой подачи материала (фиг. 1) содержит силовые линии 60, комплектные тиристорные электропроводы 61-68 КТЭ1...КТЭ8, состоящие каждый из тиристорного преобразователя , системы автоматического регу.лирования и системы управления, защиты и сигнализации. Каждый КТЭ подключен к своей секции движения 6976 Д1...Д8 кольцевого тро.ллейного токоподвода. Кольцевой троллейный токоподвод питания двигателей транспортных средств представляет собой не более чем два кольцевых троллея, состоящие из чередующихсямежду собой секций движения Д1...Д8 и секций стоянки 77-84 С1...С8. о Каждая из секций, стоянки С1...С8 снабжена коммутирующим блоком 85, состоящим из двух контакторов Н(на- чало) и К(конец), тремя путевыми, предпочтительно, бесконтактными датчиками и блоком 66 логики БЛ1...БЛ8. Силовые замыкающие контакты 87 контактора. Н подсоединены параллельно разрывам между секцией стоянки и последующей секцией движения, а силовые замыкающие контакты 88 контакторов К подсоединеныпараллельно разрывам между секцией стоянки и предьвдущей секцией движения. Путевой датчик подхода транспорт ного средства к секции стоянки, име нуемый датчиком 89 подхода ДП1...ДП устанавливается в конце предьвдущей секции движения таким образом, чтобы при торможении транспортного сред ства с началом торможения в момент воздействия установленного на транспортном средстве экрана путевых датчи ков на датчик подхода ДП1. , .ДП8 полная остановка транспортного средства обеспечивала бы положение его токос емников, не доходя секции стоянки н незначительное расстояние (например 1 м) . Путевой датчик входа транспортно го средства на секцию стоянки, именуемый датчиком 90 входа ДВ1...ДВ8, устанавливается таким образом, что его срабатывание от экрана прбисхо- дит при полном входе токоподъемнико транспортного средства с предыдущей секции движения на секцию стоянки. Путевой датчик схода транспортного средства с секции стоянки на последующую секцию движения, именуемых датчиком 91 схода ДС1...ДС8, устанавливается таким образом, что его срабатывание от экрана происходит при полном сходе токосъемников транспортного средства с секции стоянки. Количество секций движения равно количеству секций стоянки, а длина каждой секции движениярассчитывается в зависимости от общей длины и конфигурации кольцевого пути, скорос ти движения на различных участках кольцевого пути, динамических харак.теристик транспортных средств и времени загрузки и разгрузки транспортного средства,таким образом, чтобы время движения транспортного средств на любой секции движения вместёГ с временем его стоянки на последующей секции стоянки было несколько меньше ритма подачи материала на загрузку транспортного средства. Длина секций стоянки, в свою очередь, должна быть достаточной для вх да на нее токосъемников транспортного средства с предыдущей по ходу сек ции движения до полной остановки токосъемников в пределах секций стоянк Устройство работает следующимобразом. , В исходном положении транспортные средства находятся на всех секциях стоянки или на части их. После подачи напряжения питания на шкаф с блоками логики с общего поста управлени системой кольцевой подачи материала от задатчика старта автоматической работы системы на входы 49 блоков логики секций стоянки, на которых находятся транспортные средства, подается логическая единица. Дсшее вся работа устрой ства происходит автоматически до тех пор, пока не будет снято напряжение питания со шкафа с блоками логики или до тех пор, пока со входов 48 всех блоков логики не будет снята логическая единица, что обуславливает запрет старта транспортных средств, пришедших на свои секции стоянки. Логическая единица со входа 49 блока логики БЛ1 через элемент ИЛИ 13 поступает на включающий вхОд элемента ПАМЯТЬ 18. Появившаяся на выходе этого элемента логическая единица поступает на первый вход элемента И 4. На втором входе этого элемента логическая единица уже имеется,поскольку датчик ЭДС ко 1лектного тиристорного электропривода КТЭ(1-1)предыдущей секции движения через вход 40 блока логики подает на вход порогового элемента 34.Ноль напряжения - на выходе порогового . элемента установлен логический ноль, а следовательно, на выходе элемента НЕ 14 и элемента задержки 25 - логическая единица. Следствием этого является появление логической единицы на выходе элемента И, которая включает элемент ПАМЯТЬ 20. Появившаяся на выходе этого элемента логическая единиц;а через выход 57 поступает в систему автоматизации загрузки и разгрузки, давая информацию о стоянке транспортного средства, как разрешение на загрузку и разгрузку через выход 58 - в систему сигнализации и сопровождения кольцевой подачи материала, а также к первому входу элемента И 7. На втором входе этого элемента логическая единица, поскольку в начале работы устройства на входе эле- , мента НЕ 17 установлен логический ноль. На третий вход элемента И Т логическая единица поступает со входа 48. блока логики, связанного с системой автоматизации загрузки и разгрузки после окончания загрузки или разгрузки транспортного средства. На входа 48 блоков логики секций стоянки, на которлх загрузка или разгрузка не предусматриваются, логическая единицаподается длительно.. Логическая единица, снимаемая с выхода элемента И 7, через элемент задержки времени 27 вызывает включение усилителя 33, выход которого через выход 53 блока логики БЛ1 подает питание на катушку контактора Н коммутирующего блока КБ секции стоян,ки Ci. t Замокающие силовые контакты контактора Н подключает секцию стоянки Ci к последующей по ходу секции движения Д1, а следовательно, к КТЭ1, а замыкающие блок-контакты контактора Н через вход 42 блока логики БЛ1 подают питание генератору единицы 36. Логическая единица, снимаемая с выхода генератора 36, подается на выход 56 блока логики БЛ1, откуда подается к одному из входов 44 либо 45 блока логики БЛ (1+1) последующей по ходу секции стоянки в зависимости от того, какая скорость схода должна иметь место на данной секции стоянки ползучая V (вход 44) или номинальная V ц (вход 45). При подключении выхода 56 блока логики БЛ1 к входу 45 блока логики БЛ (i+1) логическая единица через элемент ИЛИ 10 включае элемент ПАМЯТЬ 22, выход которого включает усилитель 30.
Выход последнего через выход 50 блока логики ВЛ (i+1) подается на .ввод задания номинальной скорости V комплектного тиристорного Электропривода КТЭ , последующей секции движения. Выход КТЭ через секцию движения Д1, контакты Н, секцию стоянки Ci и узел токосъема подан к двигателю транспортного средства, стоящего на секции стоянки Ci. Напряжение на выходе КТЭ| нарастает до номинального значеАия, соответствующего номинальной скорости транспортного средства, на которой происходит сход с секции стоянки С1 и движение по секции движения fli..
Указанный режим соответствует прямолинейномудвижению транспортного средства на секции стоянки и последующей секции движения.
При подключении выхода 56 блока БЛ1 к выходу 44 блока логики БЛ(i+) логическая единица через элемент ИЛИ 9 включает элемент ПАМЯТЬ 23, выход которого включает усилитель 31 Выход последнего через выход 51 .блока логики БЛ(1+1) подается на ввод задания ползучей скорости УПД комплектного тиристорного электропривода КТЭ последующей секции движения Д1. Выходное напряжение КТЭ.; через секцию движения fli, контакты Н и секцию стоянки Ci поступает к двигателю транспортного средства, которое начинает сход с секции стоянки на ползучей скорости. Этому peжи .соответствует сход транспортного средства с секции стоянки на последующую секцию движения, начало которой предсталяет собой криволинейный участок пути, где по условиям конструкции транспортного средства и рельсового пути необзбодима ползучая скорость (например, после секции стоянки, служащей для разгрузки транспортного средства последующая за ней секция движения включает в себя криволинейныНГ участок рельсового пути, на котором происходит изменение направления движеМин транспортного средства на 180 , после чего оно движется в сторону загрузки). После выхода транспортного средства на прямолинейную часть секции движения fli происходит переход с ползучей скорости УПЛ на номинальную VH. В месте перехода с ползучей скорости на криволинейном участке на номинальную скорость на прямолинейном участке установлен пу.тевой датчик перехода с ползучей пл на номинальную Уц скорость VA (не показан), выкод которого подключен на вход 46 блока логики БЛ(i+l) последующей секции стоянки. При срабатывании датчика от экрана, установленного на транспортном средстве, логическая единица, снимаемая с его выхода, поступает через элементы ИЛИ 10 и 12 на выключающий вход элемента ПАМЯТЬ 23 и с выхода элемента ИЛИ 10 на включающий вход элемента ПАМЯТЬ 22. Тем самым задание ползучей скорости снимается, а устанавливается задание номинальной скорое-:-, ти VH .
Возможен так;же режим работы транспортного средства на секции движения, когда криволинейный участок движения расположен между двумя прямолинейными. В этом случае выход 56 блока логики БЛ1 подключается к входу 45 блока логики БЛ(1+1), обеспечивая от.правку транспсртного средства с номинальной скоростью . При подходе транспортного средства к началу криволинейного участка от экрана, установленного на транспортном средстве, срабатывает путевой датчик перехода с номинальной (Н) скорости на ползучую (Пл) flH/П (не показан), выход которого подключен на вход 44 блока логики БЛ(i+1) последующей: секции стоянки. При этом логическая единица, снимаемая с выхода датчика, через элементы ИЛИ 9 и 11 выключает элемент ПАМЯТЬ 22 и, снятая с выхода элемента ИЛИ 9, включает элекюнт ПАМЯТЬ 23. При этом задание номинальной скорости снимается, а .устанавливается задание ползучей скорости.
При подходе транспортного средства к концу криволинейного участка сраба1Ъ вает путевой датчик перехода с ползучей (ПЛ) на номинальную (Н) скорость fl Пл/Н (не показан), производя уже описанные переключения по цепи: выход датчика fl ПЛ/й - вход 46 блока логики БЛ(1+1), элемент ИЛИ 10 и далее выключающий вход элемента ПАМЯТЬ 23 через элемент ИЛИ 12 и включающий вход элемента ПАМЯТЬ 22.
При сходе транспортного средства с секции стоянки срабатывает датчик схода flCi. Логическая единица, снимаемая в этот момент с выхода датчика схода flC через вход 39 блока логики БЛ1 включает элемент ПАМЯТЬ 19, снимаемая с выхода этого элемента логическая единица поступает на вход элемента НЕ 17, выход которого устанавливается в логический ноль, что обуславливает появление логи.ческогЬ нуля на .выходе эл-емента И 7 и выключение усилителя 33. Катушка контактора Н теряет питание, и секция стоянки отключается от последующей секции движения. Транспортное средство продолжает двигаться по секции движения Д1. , Информация об этом в виде логической единицы поступает с выхода включенного элемента ПАМЯТЬ 19 на выход 59 блока логики БЛ1, откуда подается в систему сигнализации и сопровождения кольцевой подачи материала в качестве сигнала наличия транспортного средства на секции дв жения Д1 и на выход 55 блока логики -БЛ1, откуда подается на вход 43 бло логики БЛ(1+1) последующей по ходу -секции стоянки, с которого поступает на первый вход элемента И 6. Есл идущее впереди транспортное средств уже сошло с этой последующей секции , стоянки C(i+l), то сработал датчик схода ДС(1+1), подав при этом логическую (единицу через вход 39 блока логики БЛ(1+1) на выключающие входы элементов ПАМЯТЬ 18 и 20. На выходе элемента ПАМЯТЬ 18 устанавливается логический ноль, который благодаря элементу НЕ 16 обуславливает логическую единицу также и на втором вх де элемента И 6. Появившаяся теперь логическая единица на выходе элемен та И 6 через элемент задержки 26 включает элемент ПАМЯТЬ 24.Включается усилитель 32 и через выход 52 блока логики БЛ(И-1) подает питание катушке контактора К коммутирующего блока KBd+l) последующей секции стоянки C(i+l). Замыкающие силовые контакты контактора К подключают сек цию стоянки С(i+1) к секции движени Д1, создавая условия для входа транспортного средства на секцию стоянки C(i+l).. Аналогично описанному протекает работа устройства при движении транспортного средства по секции движения. Д(1-1) : при сходе транспортного средства на эту секцию движения с секции стоянки C(i-l) срабатывает датчик схода с этой секции ДС(1-1) и блок логики БЛ(±-1) этой секции с выхода 55 посылает в блок логики БЛ1 на вход 43 логическую единицу, как информсщию о движении транспортного средства по секции движения Д{1-1). Одновременно ведется опрос секции стоянки Ci о наличии на ней идущего впереди транспортного средства. При освобождении этой секции стоянки от датчика схода ДС1 в блоке логики БЛ1 выключается элемент ПАМЯТЬ 18,. на втором входе элемента И 6 устанавливается логическая единица и, появившаяся при этом логическая единица на выходе элемента И 6, является командой на подключение контактором К коммутирующего блока КБ секции стоянки Ci к секции движения Д(1-1). При срабатывании контактора К его эакыкающие блок-контакты череэ вход 41 блока логики БЛ подают питание генератору единицы 35. Логическая единица, снимаемая с выхода генератора 35, подается навторой вход элемента И 1. При подходе транспортного средства к секции стоянки С от экрана, установленного на транспортном средстве, срабатывает путевой датчик подход ДП1. Логическа.я единица с выхода датчика подхода ДП1 через вход 37 блока логики БЛ1 поступает на первый вход элемента И 1. Снимаемая при этом с выхода элемента И 1 логическая единица череэ элементы ИЛИ 9 и 11 подается навыключающий вход элемента ПАМЯТЬ 22, а логическая единица, снимаемая с выхода элемента ИЛИ 9, включает элемент ПАМЯТЬ 23. С комплектного тиристорного электропривода КТЭ (i-1), питающего секцию движения Д(1-1) и подключенную к ней в этот момент секцию стоянки Ci, снимается задание номинальной скорости и устанавливается задание ползучей скорости. Выходное напряжение КТЭ(i-1) снижается, и транспортное средство на ползучей скорости входит на секцию стоянки Ci. При этом срабатывает датчик входа этой секции стоянки ДBi. Логическая единица, снимаемая с выхода датчика входа flBi, через вход 38 блока логики БЛi и элемент ИЛИ 13 включает элемент ПАМЯТЬ 18. Логическая единица с выхода элемента ПАМЯТЬ 18 поступает через элемент ИЛИ 8, одновибратор 29 и элемент ИЛИ 12 на выключающий вход элемента ПАМЯТЬ 53, обеспечивая, тем самым, снятие с КТЭ (i-1) задания ползучей скорости и торможение транспортного средства на секции стоянки Ci до нуля; на второй вход элемента ИЗ; на первый вход элемента И 4. Пэ мере Торможения транспортного средства на секции соянки Ci ЭДС двигателя падает, в связи с чем величина напряжения, подаваемая с датчика ЭДС КТЭ(i-1) через вход 40 блока логики БЛ на вход порогового элемента 34, становится близкой к нулю. На выходе порогового элемента устанавливается логический ноль, а на выходе элемента НЕ 14 - логическая единица, которая через время задержки элемента 25, необходимое для гарантированной полной остановки транспортно хэ средства, появляется на втором входе
элемента И 4. Элемент И 4 включает элемент ПАМЯТЬ 20. Логическая единица снимаемая с выхода элемента ПАМЯТЬ 20, производит следующие операции; выключает элемент ПАМЯТЬ 24,вслествие чего катушка контактора К коммутирующего блока КБ теряет питайие и замлкающие контакты контактора К, размыкаясь, отключают секцию стоянки Ci от предыдущей по ходу секции движения ДС (i-1); поступает на выхо 54 блока логики БЛ1, откуда на вход 47 блока логики БЛ(1-1) предыдущей п ходу секции стоянки С(1-1) и далее через одновибратор 28 на выключающий вход элемента ПАМЯТЬ 19 блока логики БЛ(1-), обеспечивая, тем caNWM, информацию о. том, что .секция движения Д(1-1) свободна для схода на нее следующего транспортного средства; поступает на выход 57 блока логики БЛ1, откуда - в систему автоматизации загрузки и разгрузки в качестве информации о стоянке транспортного средства, а также на выход 58 для использования в системе сигнализации и сопровождения кольцевой подачи материала; подготавливает подключение контактором Н секции стоянки Ci к последующей секции движения Д±, поступая на первый вход элемента И 7.
Остановка идущего впереди транс портного средства на последующей секции стоянки С(1+1) вызывает включение элемента ПАМЯТЬ 20 блока логики БЛ(1+1), выход которого по цепи выход 54 .блока логики ВЛ(1+1), вход 47 блока логики БЛ1 и одновибрахор 28 обуславливает выключение элемента ПАМЯТЬ 19 блока логики БЛ1. Следствием этого является логический ноль ha входе элемента .НЕ 17 и логическая единица на второй входе элемента И 7 На третьем входе этого элемента логическая единица появляется из систеMJ автоматизации загрузки и разгрузки после ее окончания (вход 48 блока Л01ИКИ БЛ1), С выдержкой времени элемента 27, достаточной для включения контактора Н после отпадания контактора К, включается усилитель 3 ко:го1ядй .подает питание на .катушку контактора Н, и секция стоянки Ci подключается к последующей по ходу секции движения Д1. Далее описанный цикл повторяется. В том же случае, когда при подходе движхтдегося по сек ции движения Д(1-1) транспортного средства к секции стоянки Ci, последняя еще заняла идущим впереди транспортным средством, т.е. на выходе элемАта ПАМЯТЬ 18 блока логики БЛi все еще имеется логическая единица, то схема элемента И б этого блока логики не может собраться и не может включиться контактор К коммутирующего блока КБ1. Следовательно, на выходе генератора единицы 35 логичесТШй ноль, а на выходе элемента НЕ 15 - логическая единица, поданная на второй вход элемента И 2. При срабатывании датчика подхода ДП1 логическая единица, снимается с его выхода, через вход .37 блока логики БЛ1 поступает на первый вход элемента И 2. Па выходе последнего появляется логичес,кая единица, которая через элемент ИЛИ 8, одновибратор 29 и элемент . ИЛИ 11 выключает элемент ПАМЯТЬ 22, и транспортное средство тормозится с номинальной скоростью до нуля, останавливаясь на секции движения перед секцией стоянки.
Одновременно с этим логическая (единица, снимаемая с датчика подхода ДП1, поступает на первый вход элемента И 3, Поскольку на втором входе этого элемента уже имеется логическая единица (секция -стоянки занята),, она появляется на выходе элемента И 3 и включает элемент ПАМЯТЬ 21, который подает логическую единиц на второй вход элемента И 5. После того, как идущее впереди транспортное средство сходит с стоянки Ci, срабатывающий при этом датчик схода ДС обеспечивает выключение элементов ПАМЯТЬ 18 и 20 и включение элемента ПАМЯТЬ 19, Логический ноль, установившийся на выходе элемента ПАМЯТЬ 18, обеспечивает появление логических единиц на выходе элементов НЕ 16,. И 6 , ПАМЯТЬ 24 и включение контактора К коммутирующего блока KBif который выполняет подключение секции стоянки С к предыдущей секции движения Д(i-l).
Одновременно с этим появляется логическая единица на выходе генератора единицы 35, которая поступает на первый вход элемента И 5. На третий вход этого элемента логическая
единица поступает с выхода элемента НЕ 16.
На выходе элемента И 5 появляется логическая единица, которая через элемент ИЛИ 9 включает элемент ПАМЯТЬ 23. Включается усилитель 31, выход последнего подается на ввод задания ползучей скорости KT3(i-l), и транспортное средство втягивается на секцию стоянки Ci.
Одновременно с включением усилителя 31 логическая едини&а, снимаемая с выхода элемента ПАМЯТЬ 23, поступает на включающий вход элемента ПАМЯТЬ 21f приводя его в исхьдное положение.
Приведенный вариант выполнения комутирующих блоков КБ1...КБ8 является не единственным. Коммутирующий блок может быть выполнен в виде бесконтактного тиристорного коммутирующего устройства. .Приведенный вариант выполнения блоков логики БЛ1...БЛ8 также является не единственным. Так, например, вместо блок-конта тов контакторов К и Н коммутирующих блоков и -питаемых через эти блок-кон такты генераторов единицы 35 и 36 блокалогики могут быть приняты с некоторым допустимым уменьшением до товерности получаемой информации эл менты задержки времени с теми же номерами 35 и 36, .устанавливаемые вме то генераторов единицы, причем вход элемента задержки.35 подключается к выходу элемента ПАМЯТЬ 24,а вход эл мента задержки 36 подключается к вы ходу элемента задержки 27, при этом время выдержки элементов 35 и 36 дол но быть несколько выше времени срабатывания контакторов К и Н. Все эле менты ПАМЯТЬ блока логики могут быт заменены RS-триггерами с использо-ванием как прямых, так и инверсных выходов. Элемент ПАМЯТЬ 18 может быть исключен в случае, если принять длину воздействующего на путевые датчики экрана несколько большей тормозного пути транспортного средства. В этом случае выход элемента ПАМЯТЬ 18 заменяется выходом элемента ИЛИ 13. В случае, если примененный комплектный тиристорный электропривод КТЭ предусматривает выдачу логической единицы при нуле ЭДС питаемого двигателя, то блок ло.гики может быть упрощен исключением порогового элемента 34, элемента НЕ 14 и элемента задержки 25 и подачей уЭпомянутой лог ческой единицы на вход 40 блока логи ки и далее, прямо на второй вход эле мента И 4. Таким образом, в отличие от иэвестньк устройств питания двигателей транспортных средств системы кольцевой подачи материала и устройств автоматического управления транспортными средствами предлагаемое обеспечивает независимое автоматическое движение Каждого транспортного средства по кольцевому пути,- ограничиваемое лишь наличием транспортного средства на последующей секции и необходимостью стоянки для загрузки ил разгрузки. При этом питание осуществляется не более чем через два якорных троллея при любом количестве транспортных средств на кольцевом пути, асекционированный троллей управления, датчики кода транспортных средств и блок дешифрации кодов отсутствуют. В случае использования рельса кольцевого пути в качестве второго полюса выхода КТЭ достаточно иметь один троллей питания всех двигателей транспортных средств, находящихся на кольцевом пути.. Предлагаемое устройство выполняет одновременно как функции питания двигателей транспортных средств,.так и функции автоматического управления транспортными средствами. За счет немедленной отправки транспортного средства на последующую секцию, как только она освободилась, исключен имеющийся в прототипе фактор стоянки всех транспортных средства до тех пор, пока последнее транспортное средство не остановится на своей секции стоянки. Независимое автоматическое управление каждым транспортным средством при всех прочих равных условиях позволяет уменьшить количество транспортных средств на кольцевом пути по отношению к прототипу, т.е. повысить производительность системл кольцевой подачи материала. Формула изобретения Устройство управления транспортными средствами системл кольцевой подачи материала, содержащее комплектные тиристорные электроприводы и кольцевой токоподвод питателя двигателей транспортных средств, выполненный в виде не более двух кольце- вых троллеев, состоящих из чередующихся секций движения, подсоединенных каждая к своему тиристорному электроприводу, и секций стоянки, каждая из которых снабжена коммутирующим блоком, состоящим из двух контакторов, соединенных с блоком логики и путевыми датчиками входа и схода транспортного средства, от ли чающееся тем, что, с целью повьошения производительности систекы кольцевой подачи материала путем независимого автоматического управления каждым транспортным средством, оно дополнительно содержит блоки логики по числу секций стоянки, Ъри этом входы каждого блока логики присоединены к путевым датчикам входа к схода своей секции стоянки и дополнительно установленному датчику подхода к этой секции, а выходы присоединены к катушкам контакторов коммутирующего блока этой секции стоянки и к входам управления скоростью комплектного тиристорного электропривода предыдущей секции движения, причем все блоки логики соединены между собой последовательно. Источники информации, принятые во внимание при экспертизе . 1.Авторское свидетельство СССР № 292755, кл. В 21 В 39/00, 1969. 2.Авторское свидетельство СССР по заявке 2718936/22-02, кл. В 21 В 39/00, 1972.
«в
D



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство питания двигателей тран-СпОРТНыХ СРЕдСТВ СиСТЕМы КОльцЕВОйпОдАчи МАТЕРиАлА | 1979 |
|
SU812370A1 |
| Устройство управления электродвигателями транспортных средств кольцевой слиткоподачи | 1983 |
|
SU1161204A1 |
| Устройство для диагностирования технического состояния транспортных средств | 1987 |
|
SU1508127A1 |
| ТОКОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ТРОЛЛЕЙНОГО ТРАНСПОРТНОГО СРЕДСТВА С АВТОНОМНОЙ ДИЗЕЛЬ-ГЕНЕРАТОРНОЙ УСТАНОВКОЙ | 1988 |
|
RU2028216C1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Устройство для предотвращения столкновения кранов | 1984 |
|
SU1188080A1 |
| Устройство для поосного взвешивания в движении железнодорожного подвижного состава | 1981 |
|
SU994926A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
| УСТРОЙСТВО ЭЛЕКТРООБОГРЕВА СТРЕЛОЧНЫХ ПЕРЕВОДОВ ТИПА СЭИТ-04 | 2015 |
|
RU2582627C1 |
| Устройство для управления линейным тяговым двигателем тележек рельсового транспорта | 1981 |
|
SU1224192A1 |