(54). УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ Изобретение относится к класу дискрет- i ныхавтоматических систем.управляющих технологическими процессами.и может быть использовано в промышленности,прнменяк щей гальваническую обработку изделий, а также для управления автоматизированными складами. Известно устройство для управления автооператорами гальванических линий, ко торые обеспечивают управление переметением обрабатываемых деталей по горизонтальным и вертикальным траекториям и получение необходимых вьшержек их в определенных ваннах в соответствии с тех нологическим маршрутом. Устройстьо для управления автооператорами линии галь ванопокрытия содержит блоки программ, управления, позиций, точного отаета, грубого отсчета, пульт управления и анализатор загрузки линии, причем блоки позиций связаны между собой, блоки управления подключены к блокам точного и грубого отсчета времени, а блок грубого отсчета времени связан с блоками позиций 1. Недостатком указанного устройства является отсутствие контроля вьшолнения программ во времени, что снижает надежность работы гальванической линии. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство программного управления автооператорами гальванической линии, содержащее по числу ав-, тооператоров блоки посто1шной памяти технологических маршрутов автооператороБ, счетчики команд, блоки управления считыванием команд, блоки анализа выполнения команд, регистры адреса перемещения автооператоров, блоки управления, блоки выделения синхронизирующей команды программ управления автооператорами, коммутаторы программ, блоки полупостояи- ной памяти технологических вьщержек времени, а также общие для всех автооператоров блок анализа выполнения программы технологического процесса, блок контроля ритма выхода подвесок с деталями, датчик точного времени и пульт управления, причем пбрвый вход блока постоянной памяти технологических маршрутов автооператоров через счетчик команд и блок управления считыванием команд подключен к блоку анализа выполнения команд, который связан с блоком анализа выполнения программы технологического процесса, блоком отработки технологических выдержек времени и блоком выделения синхронизирующей команды программ управления ав.тооператорами, связанными с блоком анализа выполнения программы гёхнологического процесса, второй вход блока постоянной памяти технологических маршрутов автооператоров связан с.блоком управления считыванием команд, связанным с блоком полупостоянной памяти технологических выдержек времени и с пультом управления, который связан с блоком контроля ритма выхода подвесок с деталями, связанными с датчиком точного вре мени и блоком анализа выполнения программы технологического процесса, с блоком выделения синхронизирующей команды программ управления автооператора ми и с коммутатором программ технологических процессов, связанным с третьим входом блока постоянной памяти технологических маршрутов автооператоров и с блоком полупостоянной памяти технологических: вьщерже1с времени, связанным с ре гистром адреса перемещения и с блоком отработки технологических выдержек времени, подключенным к датчику точного времени, выход блока постоянной памяти технологических маршрутов автооператоров через регистр адч реса перемещения связан с блрком управления автоопёратором, связанным с датчиками положения автооператоров, исполнительными механизмами автооператоров к блоков отработки технологических вытержек времени. Блок постоянной памяти технологичес, ких маршрутов автооператоров представля ет собой постоянную память на феррито- вых кольцах, выполненную в виде сменног модуля, в котором записаны программы технологических маршрутов передвижения одного автооператора для всех предусмо ренных технологических процессов. Счетчик команд служит для фррмирования адреса считывания очередной команды перемещения автооператоров выбранного техн погического процесса. Блок управления считыванием команд управляет считьтанием из блока постоянной памяти технологических маршрутов автооператоров команд перемещения, а из блока полупостоянной памяти - технологических выдержек времени. Блок анализа выполнения команд служит для определения момента выполнения автооператорам заданной команды, т. е. прихода автооператора в заданную командой перемещения ванну и отработки заданной технологической выдержки времени. Регистр адреса перемещения автооператора служит для запоминания команды перемещения на время ее отработки автоопе- ратором. Блок управления автооператором с помощью датчиков, установленных на ваннах линии, следит за местонахождением автооператора и формирует соответствую- цще управляющие сигналы. Блок выделения синхронизирующей команды программ управления автооператорами служит для формирования сигнала о выполнении программы технологического марщрута данного автооператора выбранного технологического процесса. Коммутатор программ осуществляет выбор программы технологического марщрута, а также .программы технологических вьщержек времени в зависимости от выбранного на пульте управления технологического процесса. Блок полупостоянной памяти техноло.гических выдержек времени предназначен для хранения выдержек времени технологических процессов и выполнен в виде набора программных переключателей, что позволяет оперативно изменять величину технологических вьщержек времени. Блок отработки технологических выдержек времени отрабатывает заданное время технологического выстоя автооператора. Блок анализа выполнения программы технологического процесса служит для определения момента выполнения программы технологического цикла отработки деталей. Блок контроля ритма выхода подвесок с деталями осуществляет контроль времени технологического цикла обработки деталей. При превышении времени выполнения технологического цикла допустимых пределов изменения заданного ритма выхода подвесок этот блок формирует соответствующий сигнал на пульт управления. Датчик точного времени служит для формирования импульсов точного времени. Пульт управления служит для пуска и останова линии, а также дли контроля за работой линии Г 21
Недостатком известного устройства является низкая надежность работы гальванической линии вследствие отсутствия контроля времени перемещения автооператора от ванны к ванне,
В процессе эксплуатации гальванической линии имеют место случаи останова автооператоров между ваннами вследствие механического заклинивания и т. п., что вызывает выход из строя исполнительных механизмов (двигателей) автроператора.
Цель изобретения - повышение надежности работы гальванической линии за счет обеспечения контроля времени перемещения автооператора между датчиками положения автооператора.
Поставленная цель достигается тем, что в устройство программного управления автооператорами гальванической линии, содержащее по числу автооператоров блоки постоянной памяти технологических маршрутов автооператоров, счетчики команд, блоки управления считыванием команд, блоки анализа выполнения команд, регистры команд, регистры адреса перемещения автооператоров, блоки управления блоки выделения синхронизирующей команды программ управления автооператорами, коммутаторы программ, блоки полупостоянной памяти технологических выдержек времени, блоки отработки технологических вьщёржек времени, а также общие для всех автооператоров блок анализа выполнения программы технологического процесса, блок контроля ритма выхода подвесок с деталями, датчик точного времени и пульт управления, причем первый вход блока постоянной памяти технологических маршрутов автооператоров через счетчик команд и блок управления считьгоанием команд подключены к блоку аналкэа выполнения команд, который бвяаан с блоком анализа вьшолнения программы технологического процесса, блоком отработки технологических выдержек времени и блоком выделения синхронизирующей команды программ управления автооператорами, связанным с блоком анализа выполнения программы технологического процесса, второй вход блока постоянной памяти технологических маршрутов автооператоров связан с блоком управления считьтанием команд, связанным с блоком полупостоян- ной памяти технологических выдержек времени и с пультом управления, который связан с блоком контроля ритма выхода подвесок с деталями, связанным с датчиком точного времени и блоком анализа
выполнения программы технологического процесса, с блоком выделения синхронизирующей команды программ .управления автооператорами и с коммутатором программ 5 технологических процессов, связанным с третьим входом блока постоянной памяти технологических маршрутов автооперато- юв и с блоком полупостоянной памяти технологических выдержек времени, свя-
занным с регистром адреса перемещения и с блоком отработки технологических вьщёржек времени, подключенным к датчику точного времени, выход блока постоянной памяти технологических маршрутов
5 автооператоров через регистр адреса перемещения связан с блоком управления автооператором, связанным с датчиками положения автооператоров, исполни- тельными механизмами автооператоров и
0 блоком отработки технологических вьщернжек времени, введены по числу автооператоров блоки контроля перемещения автооператора, первые входы которых связаны с датчиками положения автооператоров,
5 вторые входы подключены к датчику точного времени, а выходы блоков контроля перемещения автооператора подсоединены к входам блоков управления автооператором.
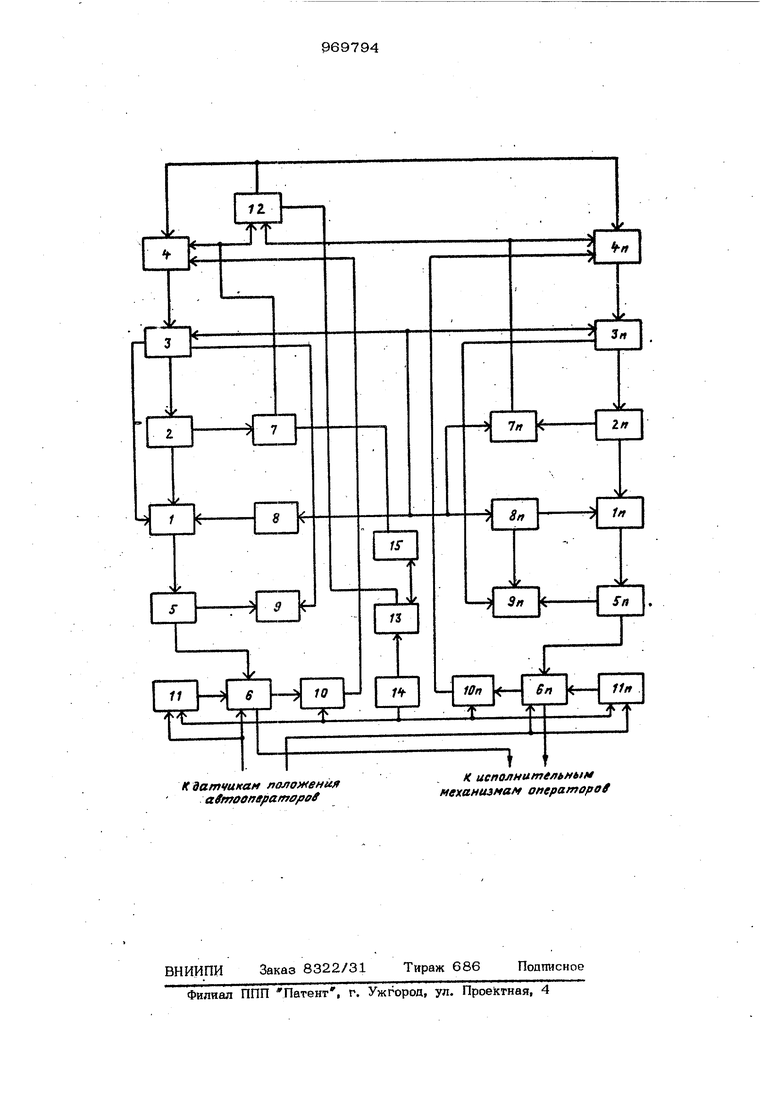
На чертеже H3o6pa3keHa структурная
0 схема устройства.
Устройство содержит по числу автооператоров блок 1 постоянной памяти технологических маршрутов автооператоров, счетчик 2 команд, блок 3 управления считыванием команд, блок 4 анализа выполнения команд, регистр 5 адреса перемещения автооператора, блок 6 управления автооператором, блок 7 выделения синхронизирующей команды программ управления автооператорами, коммутатор 8 программ, блок 9 полупостоянной памяти технологических вьщёржек времени, блок 1О отработки технологических выдержек времени, блок 11 контроля перемещения автооператора.
Устройство также содержит общие для всех автооператоров блок 12 анализа вы- полнения программы технологического процесса, блок 13 контроля ритма выхода подвесок с деталями, датчик 14 точного времени и пульт 15 управления.
Назначение всех составляющих устройства аналогично назначению их в нзвест ном устройстве, кроме . .блоков контроля перемещения автооператора, которые служят для обнаружения задержки автооператоров при движении их в промежутке меж- ду датчиками положения автооператоров Бьпие допустимого времени и последующего аварийного отключения питания двигателей автоопер)аторов. Каждь1й блок контроля перемещения автооператора содержит последовательно соединенною элемент ИЛИ, счетчик, компаратор и регистр уставки. Входы элемента ИЛИ соединены с датчиками положения автооператоров, счетный вход счетчика подключен к выходу датчика точного времени. Выход компаратора подсоединен к блоку управления автооператором. При нахождении автооператора над одной из ванн гальванической линии соответствующий датчик положения автооператора замкнут и сигнал с него через элемент ИЛИ поступает на вход Установка О счетчика, на счетный вход которого поступают импульсы времени с датчика точного времени. При сходе автооператора с датчика положения сигнал на входе Установка О счетчика исчезает и он начинает ;-считат импульсы времени, поступающие с датчика точного времени. Счет продолжается до появления сигнала на входе Установка О вследствие замьпсания очередного по.направлению перемещения автооператора датчика положения.. Содержимое счетчика постоянно сравни вается с содержимым регистра уставки, в случае их равенства на выходе компаратора появляется сигнал, поступающий в блок управления автооператором и обеспечивающий отключение двигателей автоопеipaTopa. В случае, когда перемещению автоопёратора в промежутке между соседними датчиками положения ничто не препятствует, счетчик не успевает сформировать (досчитать) код, равный содержимому регистра уставки и сигнал на выходе ком пара тора не формируется. В случае, когда при перемещении меж(ДУ соседними датчиками положения происходит механическое заклинивание, препятствующее далънейщему перемещениюавтооператора, счетчик формирует код, равный содержимому регистра уставки и на выходе компаратора появляется сигнал, обес печивающий отклвэчение двигатели автооператора. Таким образом, при безаварийном пере мещении автооператора на гальванической линии каждый датчик положения при прохождении через него автооператора, обеспечивает сброс счетчика и сигнал аварийного отключения не формируется, а при адержке или останове автооператора между атчиками положения вследствие механического заклинивания в т. п. происходит переполнение и формирование сигнала аварийного отключения двигателей автооператора. Форм у л а изобретения 1. Устройство программного управления автооператорами гальванической, линии, содержащее по числу операторов блоки ПОСТОЯННОЙ памяти технологических маршрутов автооператоров, счетчики команд, блоки управления считьюанием команд, блоки анализа выполнения команд, регистры адреса перемещения автооператоров, блоки управления, блоки выделения сихронизирующей команды программ управления автооператорами, коммутаторы программ, блоки полупостоянной памяти технологических вьщержек времени, блоки отработки технологических выдержек времени, а также общие для всех автооператоров блок анализа выполнения программы технологического процесса, блок контроля выхода подвесок с деталями, датчик точного времени и пульт управления, причем первый вход блока постоянной памяти технологических марщрутов автооператоров через счетчик команд и блок управления считьтанием команд подсоединены к блоку анализа выполнения команд, который соединен с блоком анализа выполнения программы технологического процесса, блоком отработки технологических выдержек времени и блоком выделения синхронизирующей команды программ управления автооператорами, связанным с блоком анализа выполнения программы технологического процесса, второй вход блока постоянной памяти технологических маршрутов автооператоров соединен с блоком управления считыванием команд, связанным с блоком полупостоянной памяти технологических выдержек времени и с пультом управления, который соединен с блоком контроля ритма выхода подвесок с деталями, связанным с датчиком точного времени и блоком анализа выполнения программы технологического процесса, с блоком выделения синхронизирующей команды программ управления автооператорами и с коммутатором программ технологических процессов, соединенным с третьим ,входом блока постоянной памяти технологических маршрутов автооператоров и с блоком полупостоянной памяти технологических выдержек времени, соединенным с 996 регистром адреса перемещения и с блоком отработки технологических выдержек времени, подсоединенным к датчику точного времени, выход блока постоянной памяти технологических маршрутов автооператоров через регистр адреса перемещения соединен с блоком управления автооператором, соединенным с датчиками положения автооператоров, исполнительными механизмами автооператоров и блоком отра- ботки технологических выдержек времени, отлича-ющееся тем, что, с целью повьпиения надежности работы гальва нической линин, оно дополнительно снабжено по числу автооператоров блоками контроля перемещения автооператора, первые входы которых соединены с дат чиками положения автооператоров, вторые входы подсоединены к датчику точного времени, а выходы блоков контроля перемешения автооператора подсоединены к входам блоков управления автооператором. 2. Устройство по п. 1, о т л и ч а torn е е с я тем, что блок контроля перемещения автооператора содержит последовательно соединенные элемент ИЛИ, счет чик, компаратор и регистр ус.тавки, входы элемента ИЛИ соединены с датчиками положения автооператоров, счетный вход счетчика подсоединен к выходу датчика точного времени, выход компаратора под соединен к блоку управления автооператором. Источники информашга, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 476334, кл. С 25 D 21/12, 1972. 2.Авторское свидетельство СССР № 654699, кл. С 25D 21/12, 1976,
К датчикам afmoons/iamopof
К иеполнит льмым межанизмам операторов


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство управления транспортными механизмами гальванической линии | 1986 |
|
SU1375689A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |