Изобретение относится кавтоматике и может быть использовано для одновременной загрузки одним конвейером п бункеров сырого топлива на тепловых электростанциях.
По основному авт. св. № 389509 известна система автоматического управления загрузкой бункеров, которая содержит устройство блокировки поднятия однолепестковых плужковых сбрасывателей, логические блоки, устройства обработки информации и выбора бункеров для загрузки и центральную вычислительную машину 1.
Недостатком этой системы является возможность управления плужковьши сбрасывателями и выполнения поочередной загрузки только одного бункера из числа бункеров, подлежащих загрузке.
Целью изобретения является расширение функциональных возможностей системы
Поставленная цель достигается тем, что в систему автоматического управления загрузкой бункеров введены ограничитель производительности, блок включения подсистем, блок выбора секций и п блоков управления секциями, первые входы которых соединены с выходами блоков переключения загружаемых бункеров соответствующей подсистемы, вторые входы - с соответствующими выходами блока выбора секции, а выходы. - с входами блоков управления загрузочных устройств, первые входы блока включения Подсистем соединены с выходами датчиков нижнего уровня, вторые входы - с выходами датчиков верхнего уровня, третьи входы - с
10 ввлходами блоков определения конца цикла засыпки бункеров, а выходы с соответствующими входами ограничителя производительности и блока выбора .секций и со входами блоков пере15ключения загружаемых бункеров соответствующих подсистем.
Предложенная система состоит из п независимых подсистем. За каждой подсистемой закреплено определенное
20 количество бункеров. Подсистемы независимо друг от друга осуществляют выбор и загрузку закрепленных бункеров.
Работают подсистемы с многосекционными загрузочными устройствами. Вы 25 полнение условия одновременной нагрузки в п бункеров с одногс конвейера обеспечивается одновременностью работы подсистем, условием независимости процесса загрузки каждого из п одновременно загружаемых бункеров, авто-
номностью работы подсистем, использованием п секционных загрузочных устройств.
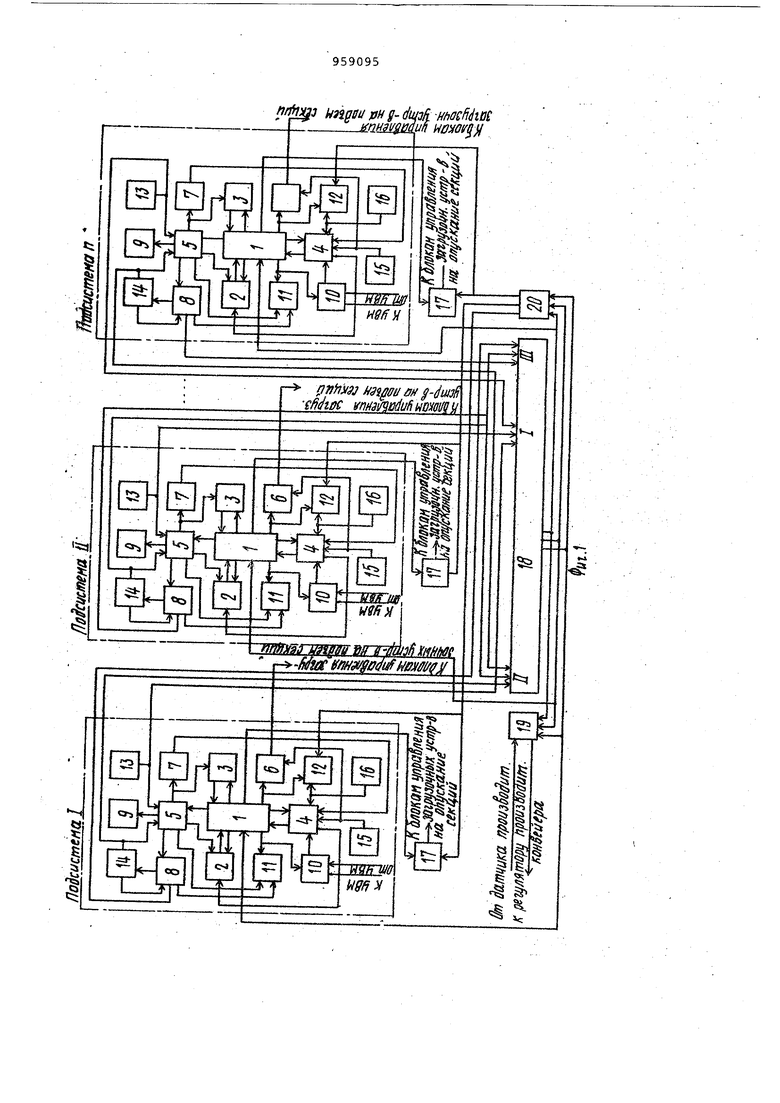
На фиг. 1 приведена функциональная схема системы.
Система содержит блоки 1 -переклю- 5 чения загружаемых бункеров, коммутаторы 2, блоки 3 запоминания очередности запросов, блоки 4 вр.емени засыпки, устройства 5 блокировки засыпки бункеров, устройства б блокировки }0 подня,тия загрузочных устройств, блоки 7 уменьшения времени засьшки, блоки 8 определения конца цикла засыпки Оункеров, блоки 9 автоматического включения системы .обрушения, блоки 10 jj связи с УВМ, блоки 11 контроля работы логики, блоки 12 контроля выполйения команд, датчики нижнего уровня 13, датчики верхнего уровня 14, датчики наличия топлива на ленте 15, датчики положения загрузочных устройств 16, блоки 17 управления секциями, блок 18 включения подсистем, ограничитель производительности 19 и блок 20 выбора секций. . . :.. . : ; . . ..
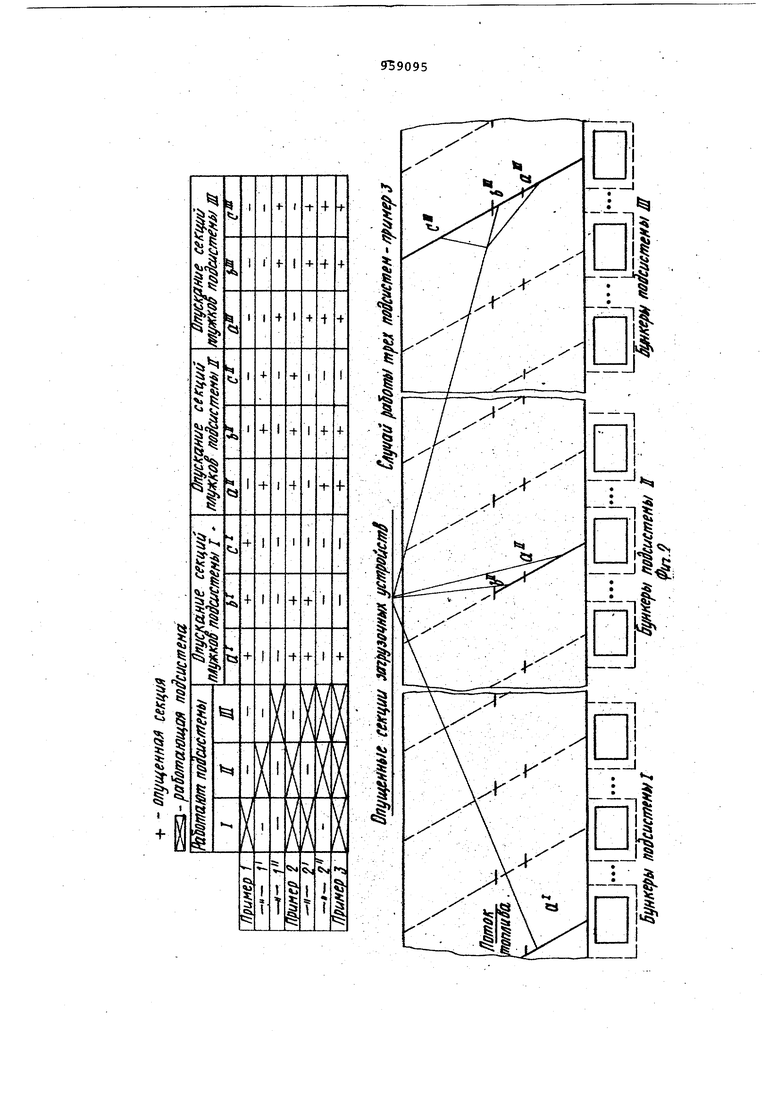
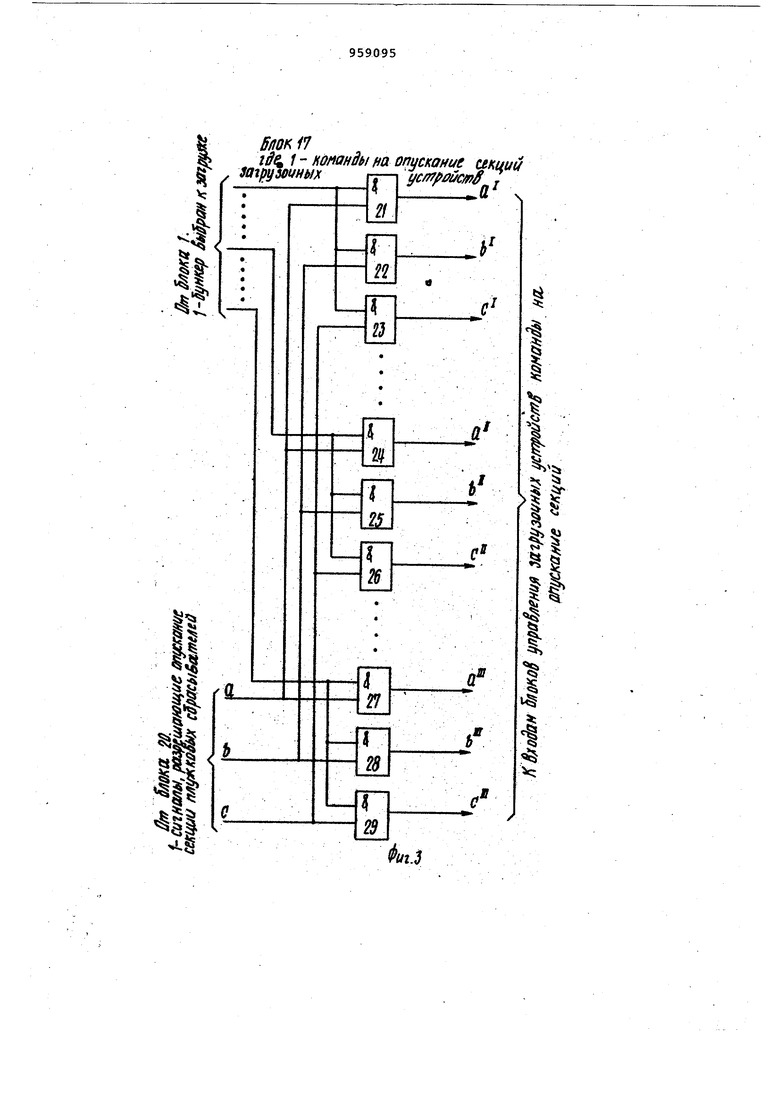
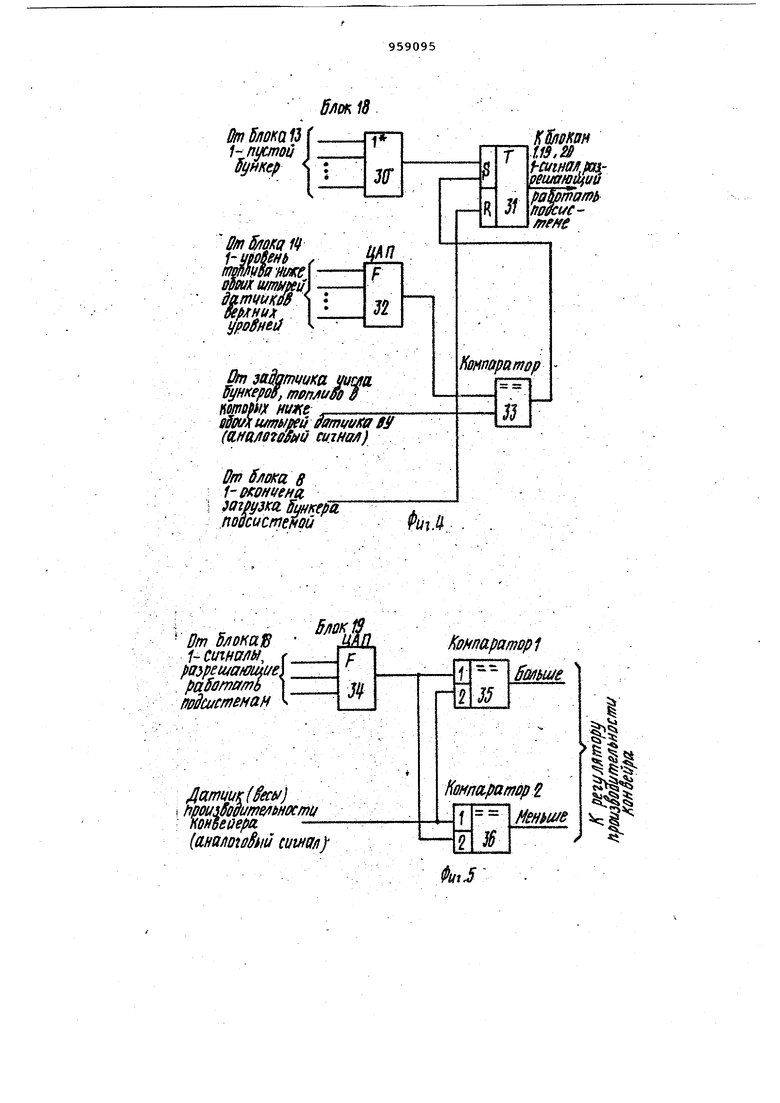
На фиг. 2 графически представлена технологическая схема системы с 3 подсистемами, да фиг. 3 функциональная схема блока 17 управления секциями, которая состоит из элементов 21-29, ресшизуккаих функции и; на фиг. 4 - функциональная схема одного из п каналов 6л1ока 18 включения подсистем. Схема содержит элемент 30 реализующий функцию И1Ш, RS-триггер 31, преобразователь 32 дискретных 35 сигналов от датчиков верхних уров- . ней в пропорциональный ангшоговый сигнал и элемент 33 сравнения аналоговых сигналов.
На фиг. 5 представлена функциональ-40 ная схема ограничителя производительности 19. Схема содержит преобразователь 34 дискретных сигнадов в.пропорциональный аналоговь сигнал и два элемента 35 и 36 сравнения аналого- лс вых сигналов.
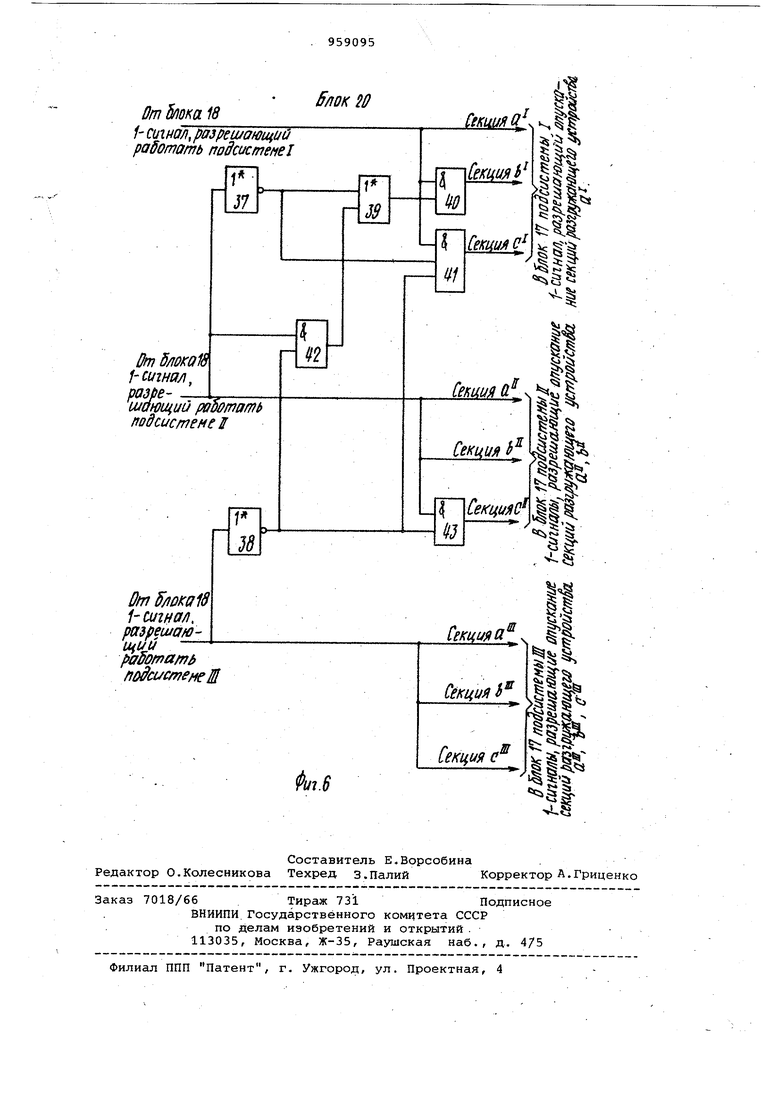
На фиг. б представлена функциональная схема блока 20 выбора секций.Схема содержит элементы 37 и 38, которые реализуют функции НЕ, элемент 39, Реа-„ ЛИЗ ующий фун к цию ИЛИ, и элемен ты 40-43 f реализующие функции И.
Система работает следующим образо «.. .
Все число бункеров распределяется поровну между подсистемами. 55
Включение подсистем в работу осуществляется блоком 18 по состоянию сигналов с датчиков верхних уровней (блоки 14) и Датчиков нижних уровней . (блоки 13). Разрешение на работу даетбО ся подсистеме при одном из условий: наличие-хотя бы одного пустого бункера, либо наличие заданного числа бункеров с уровнем топлива ниже сэбоих штырей датчика верхнего уровня. 65
Сигналы на разрешение работы подсистем поступают в блоки 1 подсистем, а также в блоки 19 и 20. :
В зависимости от числа включенных прдсистем ограничитель 19 формирует команды на регулятор производительности для установки соответствующей производительности конвейера.
При работе всех п подсистем в каждый из загружаемых бункеров ссыпается Q/n топлива, где Q - полная производительност.ь конвейера. При отключении каждой подсистемы производительность конвейера уменьшается на Qjh.
На фиг. 2 для примера приведена технологическая схема загрузки б-ункеров, где система автоматического управления содержит три подсистемы. На каждый бункер установлено одно разгружающее устройство, имеющее три секции (а,в,с).
Пример 1. При работе одной подсистемы из п (I) загружается один бункер из т путем опускания трех секций (.3 ,в , с) разгрузочного устройства, т.е. перекрывается полностью вся лента конвейера.
Пример 2. При работе двУх подсистем из п (| и I1) загружается два бункера из m путем опускания пяти секций (а , в и а, в , с) одного разгружакнцего устройства частично, а второго полностью.
Пример 3. При работе трех подсистем из п (I , I I и ill) одновременно загружается три бункера из m путем опускания, шести секций. Лента конвейера в данном случае перекрывается секциями а , а, в и а , в-, с - двумя разгрузочными устройствами- частично и третьим полностью.
В зависимости от того, какие подсистемы включены, блок 20 выбирает для управления каждой подсистемой определенные номера секций загрузочных устройств. Сигналы, разрешающие работу секций, поступают в блок.и 17.Блоки 17 разрешают прохождение команд на опускание только тех секций загрузочных устройств, которые выбраны блоком 20.
Команды на подъем секций формируются блоками б с помощью общего для всех секций сигнала.
При окончании загрузки бункеров какой-либо подсистемой с блока 8 этой подсистемы подается сигнал на блок 18, который запрещает работу этой подсистемы и изменяет управляющие сигналы на блоки 19 и 20.
В блоках 17 (фиг. 3) на. каждое загрузочное устройство включено по три элемента 21-23, 24-26 и т.д. (по числу секций), реализующих функции И.
В случае выбора какого-либо бункера под загрузку с блока 1 поступает сигнал 1 на первые входы соответствующих элементов И соответствующего бункера. На вторые входы элементов И с блока 20 поступают сигналы 1, разрешающие опускание выбранных секДйй того жебункера. По совпадению на элементе И этих двух сигналов формируются командаа на опускание секций. В .блоке 18 {фиг. 4) сигналы от датчиков 13 нижнего уровня после обработки элементом 30 поступают на первый S вход триггера 31. , При появлении пустого бункера на одном из входов элемента ИЛИ и соответственно на выходе появляется сигн.ал 1. По этому сигналу триггер перебрасывается и на его выходе появляется сигнал 1, который разреши работу подсистеме с пустым бункером. Сигнал 1 на выходе триггера держит ся до поступления на Л вход сигнала 1 с блока 8. , . На вход преобразователя дискретны сигналов (ЦАП) 32 поступает информация с датчиков верхнего уровня 14. Преобразователь выдает на вход элемента сравнения (компаратор) 33 аналоговый сигнал пропорционально числу бункеров, уровень топлива в котррых ниже обоих штырей датчиков верхнего уровня. На второй вход элемента 33поступает аналоговый сигнал рт задатчика числа таких бункеров. При равенстве обоих сигналов или большем сигнале с элемента 32 элемен том 33 формируется сигнал 1, посту пающий на второй S вход триггера который его перебрасывает, и подсистеме разрешается работа. Таким образом, подсистема включается в работу при появлении хотя бы одного пустого бун кера или наперед заданного числа Не заполненных бункеров. / В ограничителе 19 (фиг. 5) элемен 34преобразует дискретные сигналы разрешающие работу подсистем, в пропорциональный аналоговый сигнал . Этот сигнал поступает на первый и второй входы элементов 35 и 36 соответственно. На второй и первый вхо ды этих элементов соответственно поступает налоговый сигнал от датчика производительности подачи материала. Если производительность MeHbtde, чём требуется; то элемент 35 формирует регулятору команду на увеличение производительности конвейера. Если производительность больше,, то включается в работу элемент 36 и формирует сигнал на уменьшение производительности . В блоке 20 (фиг. 6) элементы, реализующие функции И, ИЛИ, НЕ, определяют выбор числа секций управляемых каждой подсистемой в соответствии с технологической схемой работы, приведенной .на фиг. 2. . Использование изобретения для загрузки бункеров тепловой электростанции повышает оперативность загрузки и надежность работы котлоагрегатов. Формула изобретения Система автоматического управления загрузкой бункеров по авт.св. 389509, отличающаяся тем, что, с целью расширения функциональных возможностей системы, в нее введены ограничитель производительности, блок включения подсистем,блок выбора секций и п блоков управления секциями, первые входы которых соединены с выходами блоков переключения загружаемых бункеров соответст- : вующей подсистемы, вторые входы - с соответствующими выходами блока выбора секций, а выходы - с входами блоков управления загрузочных устройств, первые входы блока включения подсистем соединены с выходами датчиков нижнего уровня, вторые входы с выходами датчиков верхнего уровня, третьи входы - с выходами блоков определения конца цикла засыпки бункеров, а выходы - с соответствующими входами ограничителя производительности и блока выбора секций и со входами блоков переключения загружаемых бункеров соответствующих подсистем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 389509, кл. G Об F, 15/46 (прото-, тип).
Bflot lf
tff 1 - кднанды т опшание секиии
I«Vзщдзо ны) гг-| yc/ffffffucfff /
j ,
л.IL-ЛЛ
-I
1
Ч
5s -::у
1§ 1
г 3
sk It
1 1
i
блог( 18 Dm 5/10 К a 18 1- сигнал, раз реш paSomomb под От 5та18 -сигнал, теитющий (дот подсистеме J 1 / 11 Секиияа ц V Секция Ь III «§аг 1 V t и II til QQ кция Ь d. mi-fc l с Сек14ияС 1 I I . §
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления загрузкой бункеров | 1975 |
|
SU553593A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОЧИСТКИ ГРУНТОВ ОТ НЕФТИ | 2012 |
|
RU2498013C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОМЕННОЙ ПЛАВКОЙ | 2001 |
|
RU2199590C1 |
| Устройство для автоматического управления процессом загрузки бункеров фосфорной печи | 1981 |
|
SU1006474A1 |
| Способ управления технологическим процессом переработки минерального сырья | 1984 |
|
SU1227246A1 |
| Система контроля запаса материала в многосекционном бункере | 1991 |
|
SU1796571A1 |
| Устройство для автоматической загрузки материала в бункера | 1979 |
|
SU889577A1 |
| Система аналитического контроля твердых проб | 1980 |
|
SU928185A1 |
| Способ управления загрузкой бункеров материалом | 1988 |
|
SU1638087A1 |
| Устройство для автоматической загрузки бункеров реверсивным передвижным конвейером | 1980 |
|
SU977337A2 |