Изобретение относится к автоматическому управлению и предназначено для использования в системах числового программного управления.
Известно устройство для позиционирования, содержащее формирователь сигналов отработки, выходы которого через элемент ИЛИ подключены к счетчику импульсов отработки, а один выход через элемент ИЛИ связан с выходом счетчика импульсов отработки, второй выход которого через схему сравнения и третий элемент ИЛИ подключен к другому входу формирователя сигналов отработки fi.
Недостатком этого устройства является его сложность и малое быстродействие.
Наиболее близким по технической сущности к предлагаемому является устройство для позиционирования, содержащее формироват.ель сигналов отработки, выходы которого через элемент ИЛИ подключены к счетчику импульсов отработки, а один вход через второй элемент ИЛИ связан с выходом счетчика импульсов отработки, второй выход которого через схему сравнения и третий элемент ИЛИ подключен к другому входу
формирователя сигналов отработки, блок определения путем торможения, один вход которого соединен с соответствующим выходом формирователя сигналов отработки, другой - со входом третьего элемента ИЛИ, один выход подключен к схеме сравнения, а другой - ко входу второго элемента ИЛИ 2 .
10
Недостатком устройства является низкая точность.
Цель Изобретения - повышение точности устройства.
Поставленная цель достигается
15 тем, что в устройство для позиционирования, содержащее суммдтор, вход которого является первым входом устройства, выход соединен с первым входом первого элемента сравнения,
20 второй вход которого соединен с выходом устройства и с выходом счетчика, введены второй элемент сравнения, задатчик скорости, первый и второй триггеры и элемент И, второй
25 вход устройства и выход задатчика скорости подключены к соответствую - щим входам второго элемента сравнения, выходы первого и второго элементов сравнения соответственно
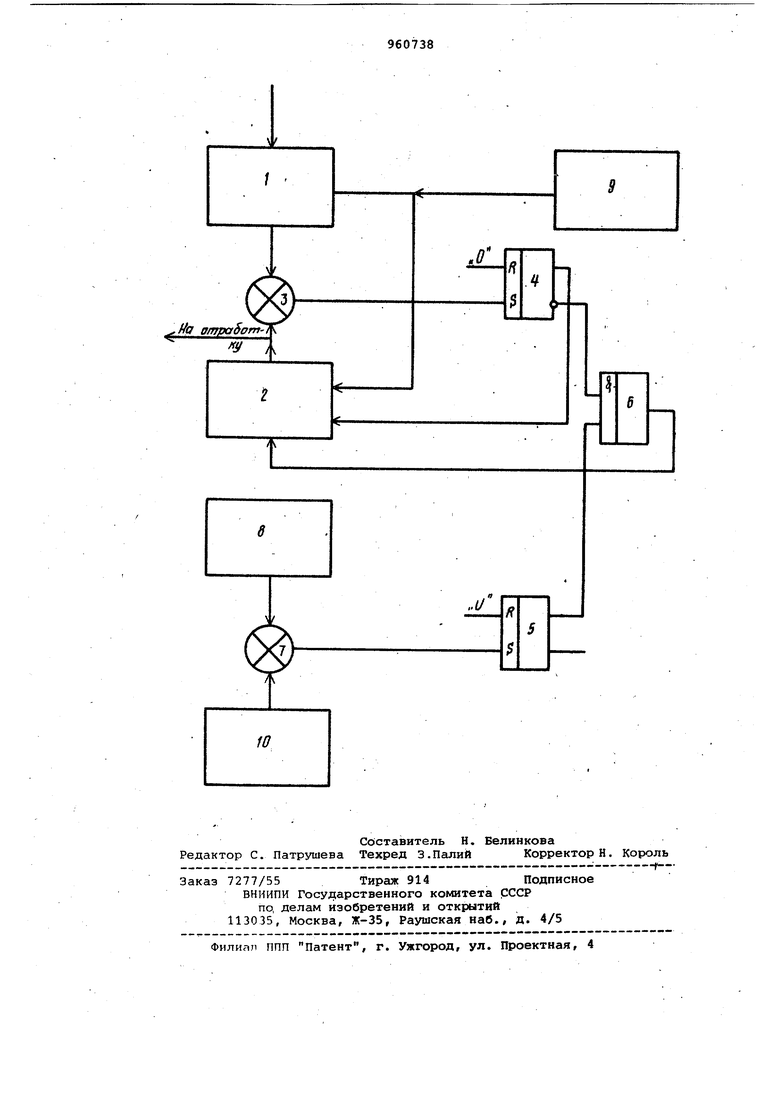
30 соединены с входами установки в единицу первого и второго триггеров, - входы установки в нуль которых подключены к входу Сброс устройстг ва, инвертирующий выход первого и прямой выход второго триггеров соединены с соответствующими входами элемента И, выход которого подключен к управляющему входу счетчика, реверсивный и счетный входы которого соединены с прямым выходом первого триггера и с первым входом устройства соответственно. На чертеже изображена функционал , ная схема устройства. Устройство содержит сумматор 1, «счетчик 2, первый элемент 3 сравнения, первый и второй триггеры 4 и 5, элемент И6, второй элемент 7 сравнения, датчики 8 и 9 скорости и перемещения, задатчик 10 скорости. Устройство работает следующим образом. В сумматор 1 записывается число N, соответствующее величине перемещения привода по одной из координат, и производится установка триггеров 4 и 5 в исходное состояни О, после чего из системы управления на привод поступает команда На чало движения. Движение привода вы появление сигнала на датчике 8 и формирование импульсов в датчик 9,которые поступают на счетные входы сумматора 1 и счетчика 2, при чем сумматор 1 работает в режиме вы читания, а счетчик 2 -. сложения импульсов датчика 9. Увеличение числа импульсов в счетчике 2 поступает на отработку в привод и пропорционально увеличивает его скорость. Оп санное состояние устройства соответ вует режиму Разгон привода. Текущее значение скорости привода измеряется датчиком 8 и одновременно с сигналом задатчика 10 поступает на входы элемента 7. При равенстве сиг налов на входах элемент 7 формирует сигнал, который поступает на единич ный вход триггера Бис его прямого выхода, на первый вход элемента И 6, на второй вход которого поступает единичный сигнал с инверсного выход триггера 4. С вь1хода элемента Иб на счетчик 2 поступает сигнал, который запрещает счет импульсов с датчика 9, что приводит к фиксации скорости привода на заданном уровне установленном посредством задатчика 10.На этом заканчивается режим Ра гон привода. В процессе движения привода величина N в су1иматоре 1 уменьшается, что приводит к соответственному изменению выходного сигнала С кодаЬ поступающего на пер вый вход элемента 3, на втором входе которого имеется фиксированный сигнал (код) со счетчика 2. При-равенстве этих сигналов элемент 3 формирует выходной сигнал, который поступает на единичный вход триггера 4, что вызывает срабатывание триггера 4, сигнал,с прямого выхода которого поступает на реверсирующий вход счетчика 2, а с инверсного выхода тригг ра 4 - на второй вход элемента Иб, на первом входе которого имеется единичный сигнал с прямого выхода триггера 5. Нулевой сигнал с выхода элемента Иб поступает на. управляющий вход счетчика 2 и разрешает счет импульсов на вычитание. Описанное состояние устройства соответствует режиму Торможение привода. Предлагаемое изобретение позволяет повысить точность Системы путем реализации более современного алг гбритма управления. Формула изобретения Устройство для позиционирования, содержащее сумматор, вход которого является первым входом устройства, выход соединен с первым входом первого элемента сравнения, второй вход которого соединен с выходом устройства и с выходом счетчика, о т л ичающееся тем, что, с целью повышения точности устройства, оно содержит второй элемент сравнения, задатчик скорости, первый и второй триггеры и элемент И второй вход устройства и выход задатчика скорости подключены к соответствующим входам второго элемента с.равнения, выходы первого и второго элементов сравнения соответственно соединены с входами установки в единицу первого и второго триггеров, входы установки в нуль которыхподключены к входу Сброс устройства, инвертирующий выход первого и прямой выход второго триггеров соединены с соответствующими входами элемента И, выход которого подключен к управляющему входу счетчика, реверсивный и счетный входы которого соединены с выходом первого триггера и с первым входом устройства соответственно. . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 489082, кл. G 05 В 19/18, 1976. 2.Авторское свидетельство СССР 488190, кл. G 05 В 19/18, 1976 (прототип).:

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования | 1983 |
|
SU1124253A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| Система управления укладкой в стопу эластичных листов | 1985 |
|
SU1265698A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |