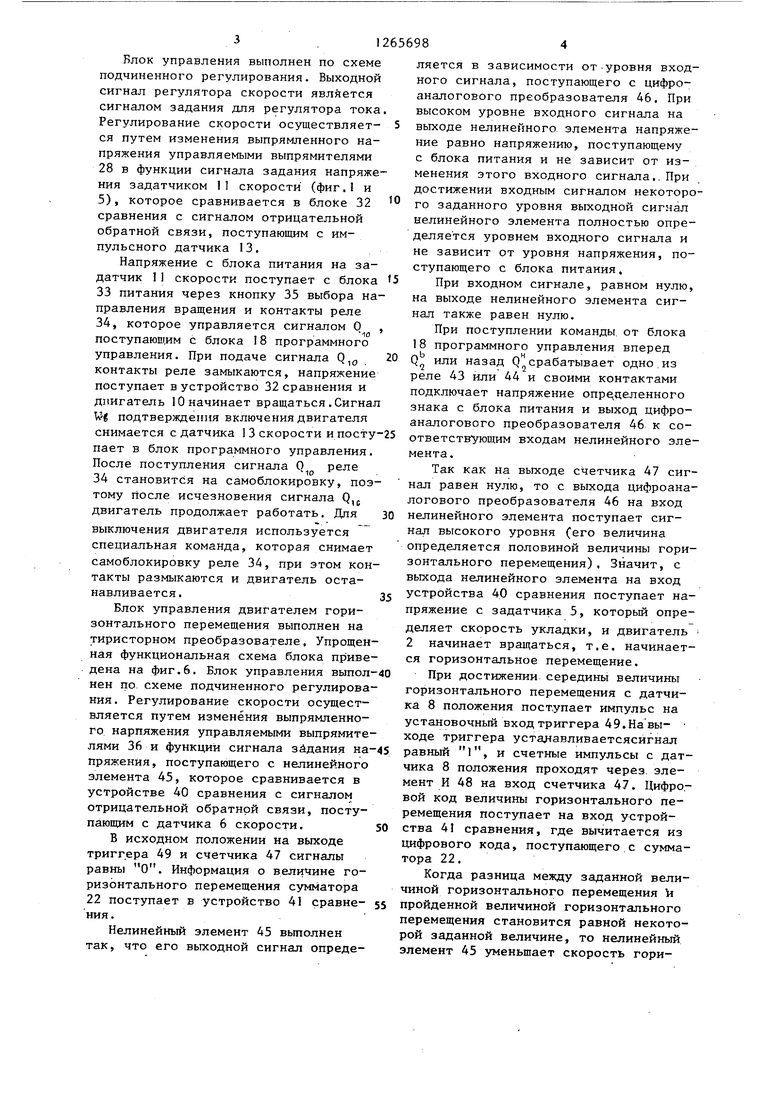
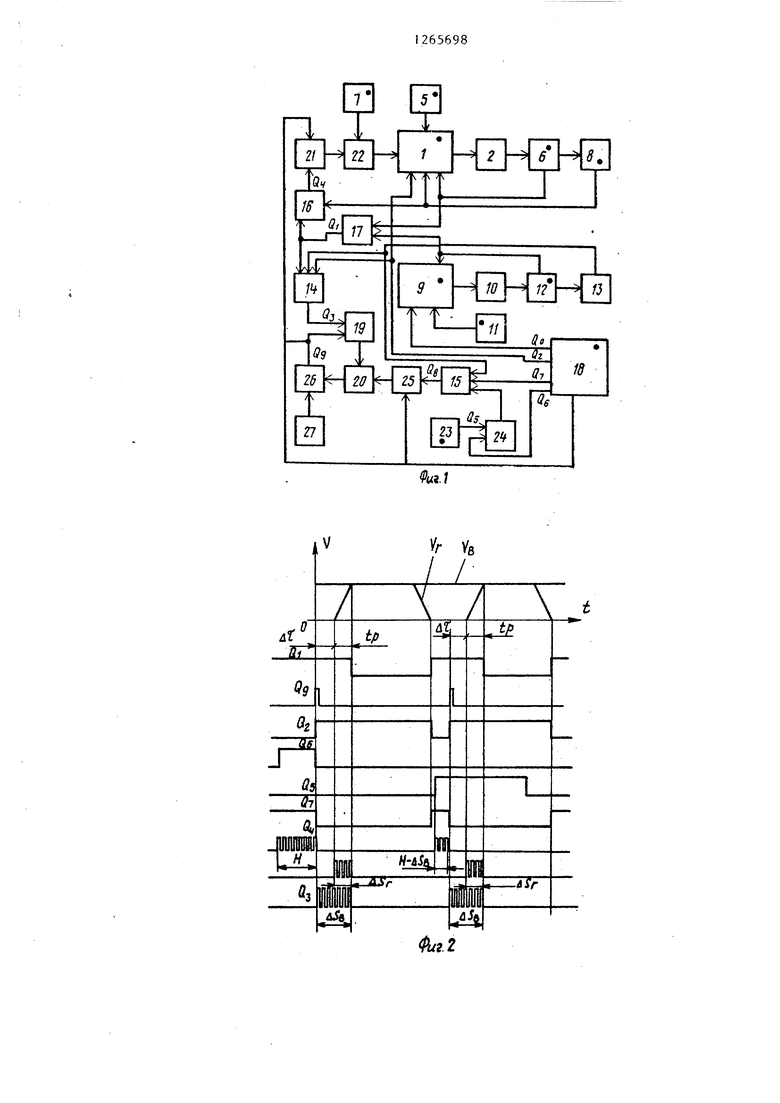
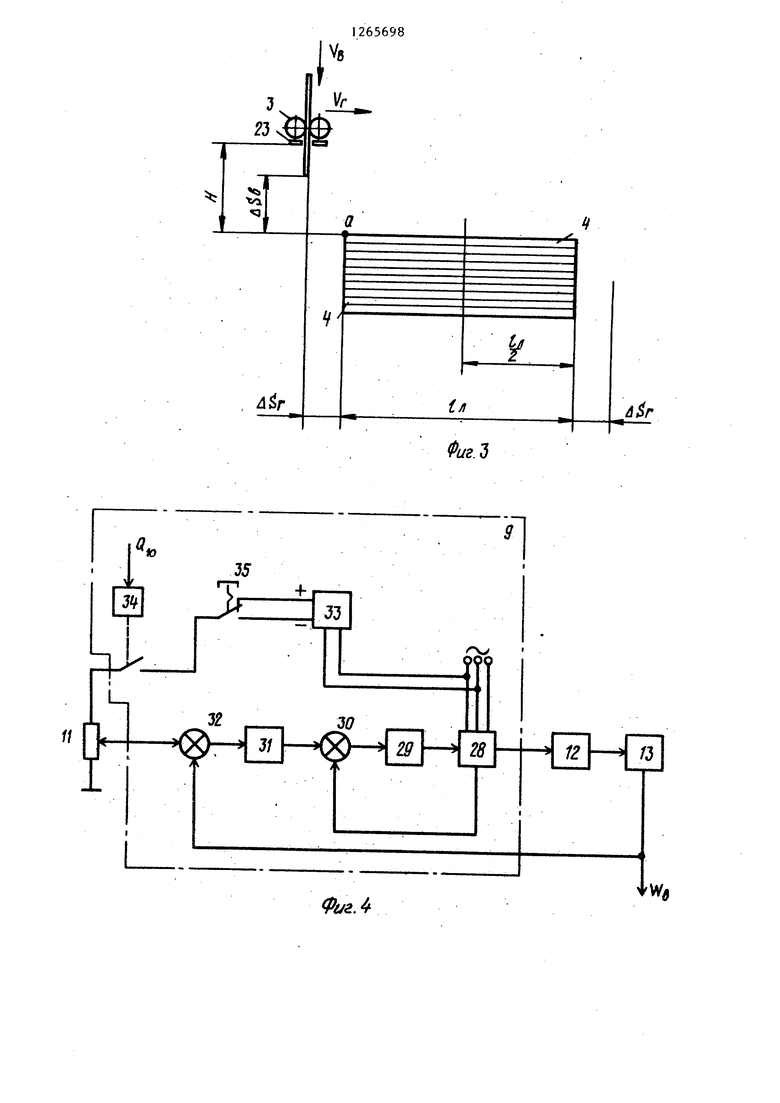
1 Изобретение относится к производ- ству резинотехнических изделий и может быть использовано во всех отраслях народного хозяйства для автомати ческой укладки в стопу эластичных листов. Цель изобретения - повьшение качества укладки листов путем исключения влияния скорости подачи листов, На фиг.1 представлена структурная схема системы управления; на фиг.2 временная диаграмма работы системы управления; на фиг.З - исходное состояние устройства перед укладкой листа; на фиг,4 - схемы блоков управ ления двигателем горизонтального и вертикального перемещения и блока программного управления соответствен но. Система управления содержит блок 1 управления (фиг.1), двигатель 2 го ризонтального перемещения, рабочий орган 3 (фиг.З), платформу 4, задатчик 5 скорости, датчик 6 скорости, задатчик 7 и датчик 8 величины горизонтального перемещения рабочего органа, блок 9 управления, двигатель 10 вертикального перемещения, задатчик 11 скорости и датчик 12 скорости вертикального перемещения, импульсный датчик 13 величины вертикального перемещения, элементы И 14-16, нульорган 17, блок 18 программного управ ления,, счетчик 19 импульсов, суммато 20, счетчик 21 импульсов, сумматор 22, датчик 23 регистрации подхода листа, элемент ИЛИ 24, счетчик 25 им пульсов, блок 26 сравнения, задатчик 27 постоянного расстояния Н. Блок управления двигателем вертикального перемещения (фиг.4) содержит управляемый выпрямитель 28, регу лятор 29 тока, блок 30 сравнения-, ре гулятор 31 напряжения (скорости), блок 32.сравнения, блок 33 питания, реле 34, кнопку 35 направления вращения . Блок управления двигателем горизонтального перемещения (фиг.5) содержит управляемый выпрямитель 36, регулятор 37 тока, регулятор 38 -скорости, блоки 39-41 сравнения, блок 42 питания, реле 43 движения вперед, реле 44 движения назад, релейный эле мент 45, цифроаналоговый преобразователь 46, счетчик 47, элемент И 48, триггер 49, нуль-орган 50. 8 Блок программного управления (фиг.6) содержит генератор 51 импульсоп, наборное поле 52, дешифратор 53, усилитель 54. Вход импульсно о датчика 8 соединен с первым входом элемента И 16 и с устройством сравнения блока 1 управления. Выход датчика 6 скорости горизонтального перемещения соединен с первым входом нуль-органа,- 17 и с устройством сравнения блока 1 управления. Выход датчика 12 скорости вертикального перемещения соединен с вторым входом нуль-органа 17 и с устройством сравнения блока 9 управления. Выход Q СФИГ.2) нуль-органа 17 соединен с вторыми входами элементов И 16 и 14. Первый выход Q блока 18 программного управления соединен с третьим входом элемента П 14 и с первым входом блока I управления. Выход Qj элемента И 14 соединен с входом счетчика 19, а выход последнего - с первым входом сумматора 20. Выход Q элемента И 16 соединен с входом счетчика 21, а 1выход последнего - с первым входом сумматора 22. На второй вход сумматора 22 подан выход задатчика 7 величины горизонтального перемещения. Выход сумматора 22 соединен с вторым входом блока 1 управления. Выход О датчика 23, регистрирующего подход торца укладываемого листа к платформе 4, соединен с первым входом элемента ИЛИ 24, а второй вход элемента ИЛИ 24 соединен с .вторым выходом Q.g блока 18 программного управления. Выход элемента ИЛИ 24 соединен с Вторым входом элеменГа И 15, а третий вход которого соединен с третьим выходом Q блока 18 программного управления, Выход Q элемента И 15 соединен с входом счетчика 25, а вы- ход последнего - с вторым входом сумматора 20. Выход сумматора 20 соединен с первым входом устройства 26 сравнения, а второй вход которого соединен с выходом задатчика 27 расстояния Н (фиг. 3) между плоскостью платформы 4 и датчиком 23. Вьпсод Q. устройства 26 сравнения соединен с входом блока 18 программного управления и с входами R обнуления счетчиков 19, 21 и 25. Блок 9 управления двигателем вертикального перемещения выполнен на тиристорном преобразователе. 31 Блок управления выполнен по схеме подчиненного регулирования. Выходной сигнал регулятора скорости является сигналом задания для регулятора тока Регулирование скорости осуществляется путем изменения выпрямленного напряжения управляемыми выпрямителями 28 в функции сигнала задания напряже ния задатчиком I 1 скорости (фиг. 1 и 5), которое сравнивается в блоке 32 сравнения с сигналом отрицательной обратной связи, поступающим с импульсного датчика 13. Напряжение с блока питания на задатчик 11 скорости поступает с блока 33питания через кнопку 35 выбора на правления вращения и контакты реле 34, которое управляется сигналом О поступающим с блока 18 программного управления. При подаче сигнала Q,, контакты реле замыкаются, напряжение поступает в устройство 32 сравнения и диигатель 10 начинает вращаться .Сигнал W подтверждения включения двигателя снимается сдатчика 1 3 скорости ипосту пает в блок программного управления. После поступления сигнала Q реле 34становится на самоблокировку, поэ тому После исчезновения сигнала Q,(, двигатель продолжает работать. Для выключения двигателя используется специальная команда, которая снимает самоблокировку реле 34, при этом кон такты размыкаются и двигатель останавливается. Блок управления двигателем горизонтального перемещения выполнен на тиристорном преобразователе, Упрощен ная функциональная схема блока приве дена на фиг.6. Блок управления выпол нен по схеме подчиненного регулирова ния. Регулирование скорости осуществляется путем изменения выпрямленного нарпяжения управляемыми выпрямите лями 36 и функций сигнала зйдания на пряжения, поступающего с нелинейного элемента 45, которое сравнивается в устройстве 40 сравнения с сигналом отрицательной обратной связи, поступающим с датчика 6 скорости. В исходном положении на выходе триггера 49 и счетчика 47 сигналы равны О. Информация о величине горизонтального перемещения сумматора 22 поступает в устройство 41 сравнения. Нелинейный элемент 45 вьтолнен так, что его выходной сигнал опреде98ляется в зависимости от-уровня входного сигнала, поступающего с цифроаналогового преобразователя 46, При высоком уровне входного сигнала на выходе нелинейного элемента напряжение равно напряжению, поступающему с блока питания и не зависит от изменения этого входного сигнала,. При достижении входным сигналом некоторого заданного уровня выходной сигнал нелинейного элемента полностью определяется уровнем входного сигнала и не зависит от уровня напряжения, поступающего с блока питания, При входном сигнале, равном нулю, на выходе нелинейного элемента сигнал также равен нулю. При поступлении команды, от блока 18 программного управления вперед Q или назад Q срабатывает одно.из реле 43 или 44 и своими контактами подключает напряжение опре целенного знака с блока питания и выход цифроаналогового преобразователя 46 к соответствующим входам нелинейного элемента. Так как на выходе счетчика 47 сигнал равен нулю, то с выхода цифроаналогового преобразователя 46 на вход нелинейного элемента поступает сигнал высокого уровня (его величина определяется половиной величины горизонтального перемещения), Значит, с выхода нелинейного элемента на вход устройства 40 сравнения поступает напряжение с задатчика 5, который определяет скорость укладки, и двигатель 2 начинает вращаться, т,е. начинается горизонтальное перемещение. При достижении середины величины горизонтального перемещения с датчика 8 положения поступает импульс на установочный вход триггера 49.На вы- ходе триггера уста савливаетсясигнал равный 1, и счетные импульсы с датчика 8 положения проходят через, элемент И 48 на вход счетчика 47. Цифро.вой код величины горизонтального перемещения поступает на вход устройства 41 сравнения, где вычитается из цифрового кода, поступающего с сумматора 22. Когда разница между заданной величиной горизонтального перемещения t пройденной величиной горизонтального перемещения становится равной некоторой заданной величине, то нелинейный элемент 45 уменьщает скорость горизонтального перемещения. Когда сигнал рассогласования, поступающий с нелинейного элемента, равен О, дви гатель останавливается. Этим же сигналом происходит обнуление счетчика 47, установка триггера 49 в исходное состояние и он используется для подтверждения выполнения заданного пере мещения в блоке программного управле ния. Система работает следующим образом. Рабочий орган 3 находится в одном из крайних положений .З). Задатчиком 7 (фиг.1) устанавливается величина горизонтального перемещения рабочего органа, равная половине дли ны укладываемого листа, так как блок 1 управления приводом горизонтального перемещения рабочего органа выпол иен таким образом, что отработка заданной величины горизонтального пере мещения начинается относительно сере дины горизонтального перемещения, С приходом управляющего сигнала на горизонтальное перемещение в блок 1 на чинается горизонтальное перемещение рабочего органа, а отработка заданно го перемещения начинается только пос ле прохождения середины. Это известное техническое решение, которое широко используется в станках с ЧПУ для i повышения точности отработки заданно го перемещения. Задатчиками 5 и 11 задают скорость укладки листов. Задатчиком 27 задают расстоян 1е Н между плоскостью платформы 4 и датчиком 23, которое поддерживается постоянtttiM в процессе укладки листов. После включения системы, до подачи листов, с блока 18 программного управления поступает сигнал Q,,, на вход блока 9 управления двигателем вертикального перемещения и двигатель 10 начинает работать (вращаться с заданной скоростью). При этом с импульсного датчика 13 импульсы поступают на входы элементов И 14 и 15. На выходах этих элементов сигналы Q Q 0, так как нет разрешающих сигналов Q и Q на прохождение импульсов. С датчика 12 скорости сигнал о величине скорости вертикального перемещения подается на один вход нуль-органа 17. Так как на другом его входе сигнал с датчика 6 равен нулю, то на его выходе сигнал Q 1 является разрешающим для прохождения импульсов. На выходе устройства 26 сравнения сигнал . Сигнал Qg является разрешающим на включение двигателя 2 горизонтального перемещения через блоки 18 и 1. При на выходе блока 18 появляется сигнал При достижении двигателем 10 заданной скорости вертикального перемещения из блока 18 программного управления на вход элемента ИЛИ 24 поступает -сигнал Q, который разрешает прохождение импульсов с датчика 13 через элемент И 15 на вход счетчика 25. Код числа поступающих импульсов с выхода счетчика 25 поступает на вход сумматора 20, а затем с выходасумматора - на вход устройства 26 сравнения,где сравнивается с заданной величиной Н, которая поступает на его другой вход с задатчика 27. Так как на другом входе сумматора 20 сигнал равен нулю, то импульсы с датчика 13 через элемент И 15 поступают до тех пор, пока на входе устройства 26 сравнения код числа импульсов не становится равным Н. При выполнении этого условия на выходе устройства 26 сравнения появляется импульсный сигнал который производит обнуление счетчиков 19, 21 и 25 (при первом включении информация о количестве импульсов имеется только насчетчике 25, а на выходах счетчиков 19 и 21 нули) и поступает в блок 18 программного управления. При поступлении сигнала из блока 18 появляется сигнал 0, который запрещает прохождение импульсов с датчика 13 и появляется сигнал О 1, который разрешает включение двигателя 2 горизонтального перемещения и прохождение импульсов с датчика 13 через элемент И 14 на вход счетчика 19. Код числа импульсов с -выхода счетчика 9 поступает ни один вход сумматора 20,. По истечении времени с момента прихода сигнала начинается горизонтальное перемещение и импульсы с датчика 8 через элемент И 16 посту пают на вход счетчика 21. Код числа импульсов с выхода счетчика 21 поступает на вход сумматора 22, где суммируется с кодом числа заданны на другом входе сумматора задатчиком 7, Когда скорость горизонтального перемещения становится равной скорости 71 вертикального перемещения, на выходе нуль-органа 17 появляется сигнал , который запрещает прохождение импульсов с датчика 8 через элемент И I6 и с датчика 13 через элемент И 14. На входе сумматора 20 записыва ется код числа величины вертикального перемещения дЗ, (величина перемещения листа со скоростью V за время t,), а на входе сумматора 22 записьгоается код числа величины гори зотального перемещения л S. за время t (от момента прихода сигнала на включение двигателя 2 горизонтального перемещения до момента достижения скорости, равной скорости вертикального перемещения). На выходе суммато ра 22 появляется код числа +Л8, . После прохождения середины (инфор мация о середине задана в блоке 1) информация с датчика 8 поступает в устройство сравнения горизонтального перемещения блока 1 управления, срав нивается с информацией, поступившей с выхода сумматора 22, и отрабатывается двир-ателем 2. После прохождения величины у- + SP двигатель 2 останав ливается. В результате этого с блока 18 программного управления поступает сигнал на технологическое оборудование о разрешении подачи листов на укладку (вспомагательные сигналы, на фиг.1 не показаны). Когда торец укладываемого листа проходит через датчик 23, тогда на его выходе появляется сигнал Рц при Q, элемент И 15 разрешает прохождение импульсов с датчика 13 на счетчик 25. На входе сумматора 20 по является код числа, равный величине вертикального перемещения торца укла дьшаемого листа, который суммируется с кодом числа uS , записанном на дру гом входе. Сумма двух чисел сравнивается в устройстве 26 сравнения Q заданной величиной Н. При их равенстве на выходе устройства сравнения появляется импульсный сигнал (, который обнуляет счетчики 19,21 и 25 : и поступает в блок 18 программного управления. При поступлении сигнала из блока 18 появляется сигнал , который запрещает прохождение импульсов с датчика 13, и появляется сигнал , который разрешает вклю988чение двигателя 2 горизонтального перемещения и прохождение импульсов с датчика 13 через элемент И 14на вход счетчика 19. Код числа импульсов с выхода счетчика 19 поступает на один вход сумматора 20. По истечении времени с момента прихода сигнала начинается горизонтальное перемещение листа и импульсы с датчика 8 через элемент И 16 поступают на вход 21 счетчика. Код числа импульсов с выхода счетчика 2I поступает на вход сзмматора 22, где суммируются с кодом числа у- , заданным на другом входе сумматора заДатчиком 7. Через время t aT+tfC момента прихода сигнала торец укладываемого лис- та касается платформы в заданной точке а (фиг.З), так как величина s записана на входе сумматора 20, а рабочий орган 3 находится от заданной точки а на расстоянии ь S, которое он пр.охоДит за время t. При этом в момент касания скорость горизонтального перемещения равна скорости вертикального перемещения, поэтому нульорган 17 выходным сигналом Q 0 запрещает прохождение импульсов с датчика 8 через элемент И 16 и с датчика 13 через элемент И 14, На входе сумматора 20 записьгоается код числа величины вертикального перемещения uSg, а на выходе сумматора 22 записывается код числа величины горизонтального перемещения & Sj- за время При касании торца листа в точке а начинается его укладка на платформу. После прохождения середины величины горизонтального, перемещения начинается отработка величины я + Л S , заданной на выходе сумматора 22. Конец укладываемого диета, ложится на платформу, а рабочий орган 3 проходит от конца укладьшаемого листа еще величину &Sf я останавливается в ожидании очередного листа. С приходом очередиогй листа цикл повторяется. Таким образом,; каждай раз при укладке очередного листа происходит обнуление и новая запись информации о величинах aS и ivS необходимых для укладки последующего листа при УСЛОВИИ, что.в момеит касания торца кладываемого листа в заданной точк платформы скорость горизоитальиого
перемещения равна скорости вертикального перемещения.
При различных всевозможных изменениях скорости укладки листов с укладкой очередного листа происходит автоматическая коррекция величин д8 и д 8„. Это позволяет исключть влияние скорости укладки листов на качество укладки.
Формула изобретения
Система управления укладкой в стопу эластичных листов, содержащая блок программного управления, блок управления двигателем горизонтального перемещения, первый вход которого соединен с выходом первого задатчика скорости, первый датчик скорости, датчик положения, задатчик величины горизонтального перемещения, а также блок управления двигателем вертикального перемещения, первый вход которого соединен с выходом второго задатчика скорости,второй датчгас скорости и датчик регистрации подхода листа, отличающаяся тем, что, с целью повышения качества укладки листов путем исключения влияния скорости подачи листов, введены импульсный датчик перемеще-о
ния, задатчик постоянного расстояния Н, элемент ИЛИ, последовательно соединенные первый элемент И, первый счетчик импульсов, первый сумматор, блок сравнения и второй счетчик импульсов , последовательно соединенные нуль-орган, второй элемент И, третий счетчик импульсов и второй сумматор, выход которого соединен с вторым входом блока управления двигателем горизонтального перемещения,а также третий элемент И, выход которого через второй счетчик импульсов подключен к второму входу первого сумматора, выход импульсного датчика перемеще- ния соединен с первым входом первого и третьего элементов И, вторые входы которых подключены соответственно к первому и второму выходам блока программного управления, соединенного третьим выходом с первым входом элемента ИЛИ, второй вход которого подключен к выходу датчика регистрации подхода листа, а выход - к третьему входу перво- . го элемента И, выход датчика положения соединен с вторым входом второго элемента И и с третьим входом блока управления двигателем горизонтального перемещения, четвертый вход которого соединен с выходом блока про- : гоа много управления, пятый вход - с выходом первого датчика скорости и с первым входом нуль-органа, второй
вход которого подключен к выходу второго датчика скорости и второму входу блока управления двигателем вертикального перемещения, четвертый выход блока программного управления
управления двигателем верти1 :апьного перемещения, выход второго блока сравнения подключен к второму входу первого счетчика импульсов, второму входу первого счетчика и входу блока программного управления, второй вход блока сравнения соединен с задатчиком постоянного расстояния Н,а второй вход первого сумматора -с выходом задатчика горизонтального перемещения. соединен с третьим входом блока
4Г
fr Ve
А
йТ
jf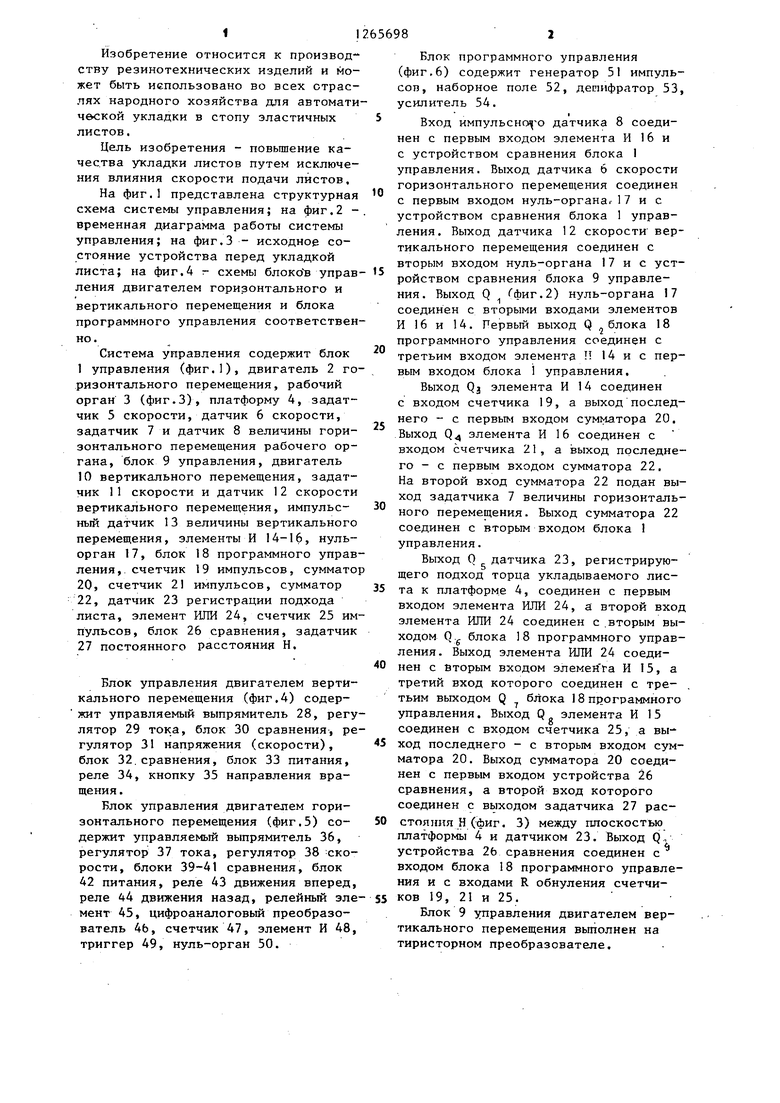

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления устройством укладки эластичных листов | 1986 |
|
SU1376062A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| Устройство для программного регулирования температуры | 1987 |
|
SU1566320A2 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Устройство опускания стола при укладкелиСТОВ B пАКЕТ | 1979 |
|
SU845910A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство автоматического управления моталкой литейно-прокатного агрегата | 1983 |
|
SU1135514A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ШЕРОХОВКИ ПОВЕРХНОСТИ ЛИСТА | 1990 |
|
RU2009833C1 |

Изобретение относится к производству резинотехнических изделий. Цель изобретения - повышение качества укладки листов путем исключения влияния скорости их подачи. Система .управления содержит блок управления двигателем горизонтального перемещения с задатчиком и датчиком скорости, с задатчиком и датчиком величины горизонтального перемещения, блок управления двигателем вертикального перемещения с задатчиком и датчиком скорости, датчик, регистрирующий подход торца укладьшаемого листа к платформе, и блок программного управления. Новым в системе .управления является введение двух контуров регулиро-. вания, которые позволяют определять и осуществлять автоматическую коррекцию величин горизонтального и вертикального перемещений листа за время, необходимое для достижения двигатеI лем горизонтального перемещения ско(Л рости, равной скорости вертикального перемещения. Система управления может быть использована во всех отраслях народного хозяйства, где требуется автоматическая укладка эластичных листов в стопу. 6 ил. ю Од Сл Од СО 00
23
35
J3
Фиг.Ъ
1
ФигЛ
ооо
гв
/J
12
Щ
ui.5
tii
1
Qi
Фиг. 6
| Способ измерения толщины льда с судна в темное время | 1936 |
|
SU52869A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для укладки эластичного материала в стопу | 1981 |
|
SU996306A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
