(5) НАМОТОЧНЫЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки электрических катушек | 1981 |
|
SU1078482A1 |
| Полуавтомат для рядовой намотки микропроводом электрических катушек | 1960 |
|
SU137968A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Стенд для испытания системы управления намоточных станков | 1987 |
|
SU1483500A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Механизм раскладки намоточного станка | 1985 |
|
SU1300578A1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |
| Устройство для раскладки провода к намоточному станку | 1971 |
|
SU482821A1 |
| Устройство для рядовой много-СлОйНОй НАМОТКи элЕКТРичЕСКиХКАТушЕК МиКРОпРОВОдОМ | 1978 |
|
SU803032A1 |
..
Изобретение относится к технологическому оборудованию для изготовления электрических катушек и может быть использовано в электротехни;ческой и приборостроительной промьшлеиности.
Известен станок для намотки элекчтрицеских катушек, содержащий привод, вариатор для изменения шага приводимый во вращение ov обцей ведущей шестерни и взаимодействующий с рейкой-проводоводителем с возможностью возвратно-поступательного перемещения 1.
Однако возвратно-поступательное перемещение производителя, происходит за счет изменения его контакта с роликами вариатора, что приводит к их износу.
Наиболее близким к изобретению по технической сущности является станок для намотки электрических катушек, содержащий привод, механизм изменения шага раскладки и механизм
реверса в виде рейки и находящихся с ней в зацеплении двух шестерен с , электромагнитными муфтами Г2.
Недостатком известного станка яв ляется элeкtpoтexничecкoe переклю- : чение механизма реверса посредством электромагнитных фрикционных муфт, подвергающихся интенсивному износу в процессе работы, большим динамическим нагрузкам и проскальtoзыванию в момент реверса раскладывающей каретки.
Цель изобретения - повышение наJ5 дежнЬсти за счет плавного переключения механизма реверса без его проскальзывания.
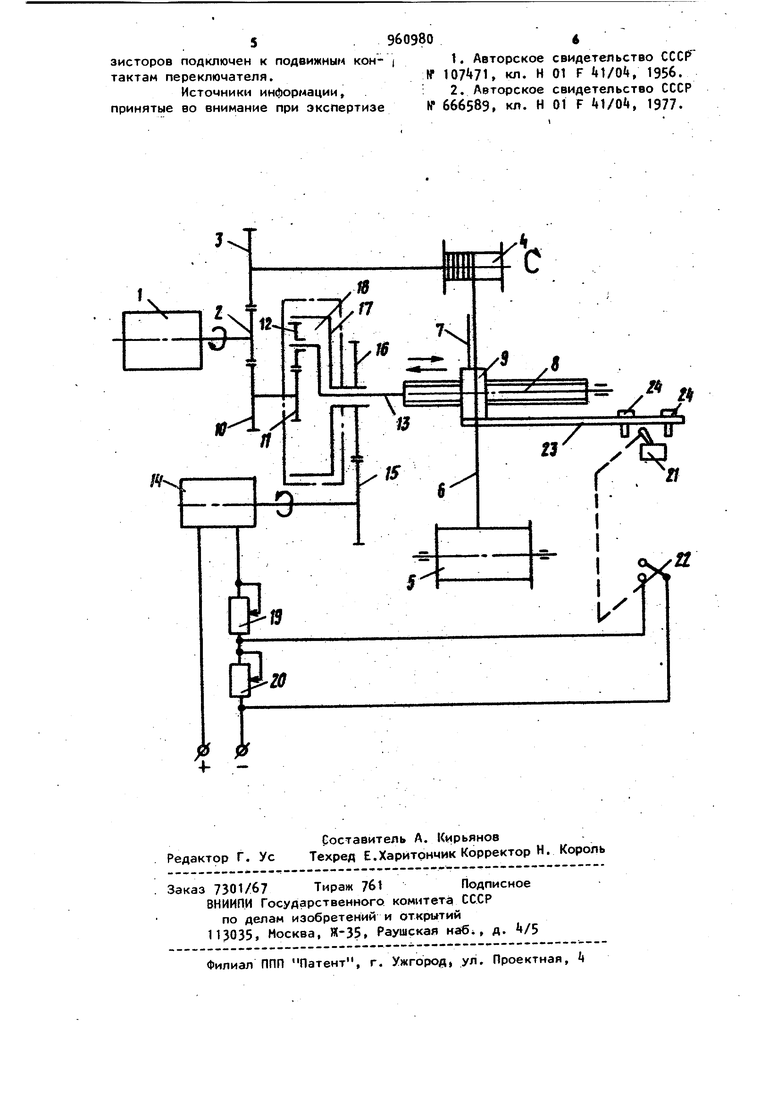
: Указанная цель достигается тем, что станок содержит дополнит ельный 20 электропривод и планетарный механизм, при этом планетарный механизм кинема тически связан с электроприводом и i механизмом раскладки -провода, а дополнительный электропривод кинемати39чески связан планетарным механизмон . Кроме того, блок управления допол нительным элект{эоприводам выполнен 8 виде двух последовательно соединен ных переменных резисторов, соединеийых с неподвижным контактом переключателя, а вывод одного из резисторов подключен к подвижным контактам переключателя. На чертеже изображена кинематическая схема станка. Намоточный станок содержит электропривод 1, связанный через шестерни 2 и 3 с катушкой . Для раскладки постуnarautero с бобины 5 провода 6 предназначен механизм раскладки пров да, состоящий из проводоводителя 7. и винта 8, переме14ающего каретку 9. Винт 8 связан с электроприбодом t че рез шестерни 2 и 10, солнечную еестерню 11, сателлиты 12, водило 13. с дополнительным эпектроприёодом IJi, механизмом реверса через шестерни Т5 и 16, коронную «вестерню 17 планетарного механизма 18 Дпя управления работой электропривода И предназначены блок управления в виде переменных резисторов 13 и 20 и переключателя 21 с контактами 22, для переключения которого служит пла ка 23 с упорами 2. Намоточный станок дйботает следую щим образом. Электропривод t через шестерни 2 и 3 вращает катушку k и сматывает «ровод 6 с бобины 5. Провод 6 укладывается на катушке k проводоводителен 7f расположенным на каретке 9, перемещаемой винтом 8. Вращение вин та 8 осуществляется водилом 13 пяанетарного механизма 18, на котором суммируется два вращения:от электропривода 1 Через шестерни 2 и 10, солнечную шестерню 11, сателлиты 12 и от электропривода 1 через шестерни 15, 16, коронную шестерню 17 и сателлиты 12. Реверс винта 8 осуществляется переключателем 21 с помощью упора 2k, которые могут перемещаться по планке 23 и осуществляют грегулировку намотки на заданную длину. Контакты 22 переключателя 21 включают в цепь питания электропривода И один переменный резистор 19 или два резистора 19 и 20, вслед ствие, чего изменяются обороты элект привода Т, а следовательно, и обороты коронной шестерни 17 планетар0ного механизма 18, и происходит изменение направления вращения водила . 13, то есть реверс винта 8. Таким образом, направление движения винта 8, а следовательно, и каретки 9 зависит от разности величины скорЬстей вращения злектроприводов 1 И И. Так раскладки регулируются ОРИ движен и каретки 9 влево - переменным резистором 19, после чего производится регулировка шага намотки при движении каретки вправо - переменным резистором 20. Расчет кинематики намоточного станка проводится таКИМ образом, что при наибольшем значении переменного резистора 19 и наименьшем значении переменного резистора 20 движение каретки 9 прекращается, Дяя .удобства эксплуатации перен& нше резисторы проградуированы в зависимости от величины шага намотки. Предлагаемое устройство обеспечивает перестройку шага намотки в широком диапазоне и осуществляет плановый реверс раскладки провода без переключений в кинематике станка, а следовательно, улучшается качество намотки провода при работе на высоких скоростях, йовышает надежность работы механизмов станка. Формула изобретения 1. Намоточный станок, содержащий электропривод, кинематически связанный со шпинделем и механизмом реверса и раскладки провода, о т л ичающийся тем, что, с це.пью повышения надежности за счет плавного переключения механизма реверса без его проскальзывания, станок содержит дополните.пьный электропривод и планетарный механизм, при этом планетарный механизм кинематически связан с электроприводом и Механизмом j раскладки провода, а дополнительный электропривод кинематически связан планетарным механизмом. 2. Станок поп.1,отличающ и и с я тем, что блок управления дополнительным электроприводом выполнен в виде двух последовательно соединенных переменных резисторов, соединенных с неподвижным контактом переключателя, а вывод одного из резисторов подключен к подвижным контактам переключателя.
Источники информации, принятые во внимание при экспертизе
ff , кл. Н01 F , 1956.
; 2. Авторскоесвидетельство СССР
№ 666589, кл. Н01 F itl/Oi, 1977.
