Изобретение относится к механическим стабилизаторам, предназначенным для выравнивания в вертикальное положение колес и корпуса шасси колесной самоходной машины при перемещении ее вдоль горного склона.
Известные механические стабилизаторы с ручным управлением, содержащие щарнирный параллелограмм, не обеспечивали автоматического выравнивания щасси самохода на косогоре.
Описываемая конструкция стабилизатора устраняет этот недостаток.
Особенностью стабилизатора является то, что он имеет дифференциал, приводимый в действие от двигателя самохода и снабженный винтом, связанным с одним солнечным колесом дифференциала посредством скользящей щпонки, а с другим-посредством винтовой нарезки, и сопряженным с щарнирным параллелограммом.
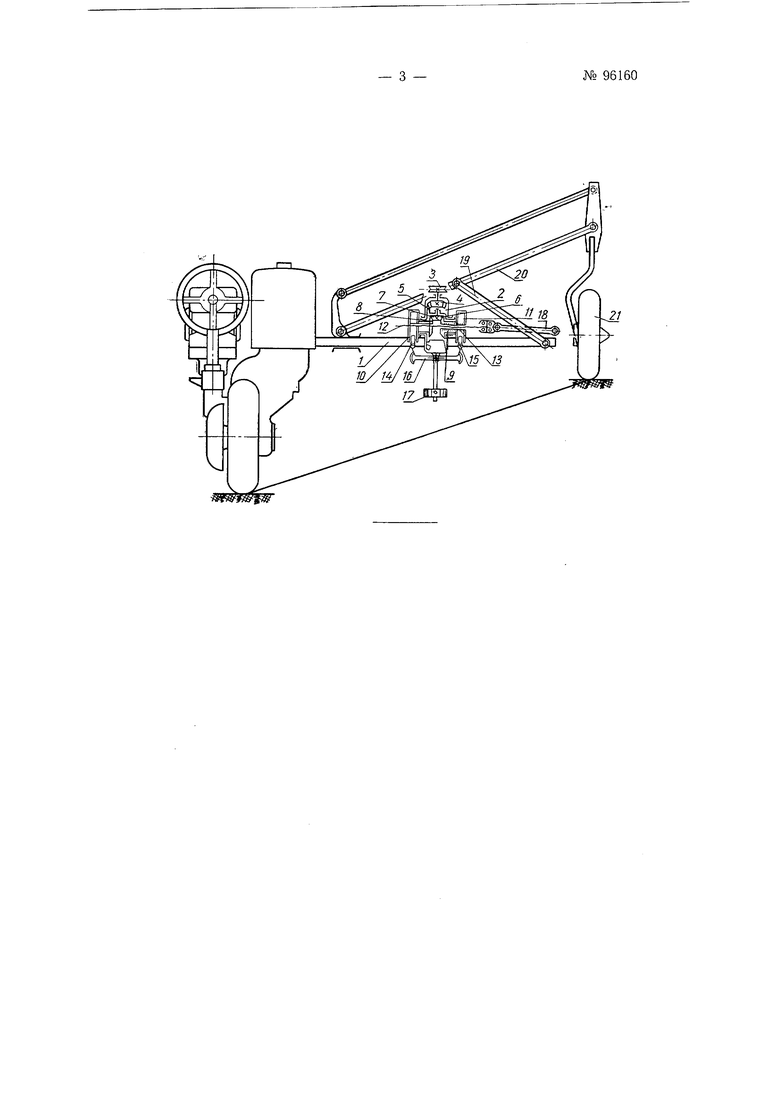
На чертеже изображен механический стабилизатор колесного самохода, общий вид.
На поперечной раме / щасси в кожухе 2 установлены дифференциал, приводимый во вращение от двигателя самохода через шкив 3, и шарнирный параллелограмм. От шкива S вращение передается через зубчатые конические колеса 4 и 5 на коробку 6, в которой имеется сателлит 7, сцепленный с солнечными колесами 8 w. 9. На ступицах солнечных колес 8 к 9 жестко установлены барабаны 10 и 11 ленточных тормозов. Внутри ступиц (полых полуосей дифференциала) проходит винт 12. В ступице солнечного колеса 8 винт 12 имеет скользящую щпонку, а в ступице солнечного колеса 9 жестко укреплена гайка 13 с винтовой нарезкой.
Ленты 14 и 15 тормозных барабанов одним концом соединены с коромыслом 16 маятника 17, а другим-с рамой / или с кожухом 2.
Винт 12 и шарнирный параллелограмм 18 сопрягаются при помощи двуплечего рычага 19. Двуплечий рычаг 19 поворотно смонтирован на
№ 96160
раме / шасси и одним плечом шарнирно соединяется с винтом 12, а другим плечом-с одним из звеиьев И1арнирного параллелограмма 20, на наружном звене которого укреплено боковое колесо 21.
При вертикальном положении боковых колес и остова шасси маятник 17, сохраняя вертикальное положение, освобождает ленты 14 и 15; солнечные колеса 8 и 9 врашаются в одном направлении с одинаковой скоростью, поэтому винт 12 не перемещается вдоль своей оси.
При отклонении самохода от вертикального положения коромысло маятника 17 воздействует на одну из лент тормозных барабанов, производя торможение одного, из солнечных колес, чем вызывает остановку вращения винта 12 при торможении солнечного колеса 8 или остановку вращения гайки 13 при торможении солнечного колеса 9. В первом случае солнечное колесо 9 вместе с гайкой 13 начинают вращаться с удвоенной скоростью, не изменяя направления вращения, причем гайка 13, навинчиваясь яа винт 12, вызывает его осевое перемещение. В другом случае винт 12, вращаясь также с удвоенной скоростью вместе с солнечным колесом 8, получает осевое неремещение в обратном направлении По отношению к предыдущему случаю, так как винт будет вывинчиваться из гайки. В обоих случаях винт 12, соединенный с шарнирным параллелограммом, будет выравнивать в горизонтальной плоскости раму /, а в вертикальной плоскости-боковые колеса самохода.
При полном выпрямлении корпуса шасси торможение маятником солнечных колес 8 ж 9 прекращается, и винт 12 снова вращается без осевого перемещения. Для предотвращения самопроизвольного подъема и опускания бокового колеса винт сделан самотормозящим.
Предмет изобретения
1.Механический стабилизатор горного колесного самохода, заключающий в себе шарнирный параллелограмм для соединения бокового колеса с рамой шасси, отличающийся тем, что он имеет дифференциал, приводимый в действие от двигателя самохода и снабженный винтом, связанным с одним солнечным колесом дифференциала посредством скользящей шпонки, а с другим-посредством винтовой нарезки, и сопряженным с шарнирным параллелограммом.
2.Форма выполнения стабилизатора по п. 1, отличающаяся тем, что сопряжение винта с щарнирным параллелограммом осуществлено при помощИ двуплечего рычага, поворотно монтированного на раме шасси и одним плечом шарнирно соединенного с винтом, а другим- с одним из звеньев параллелограмма, соединяющего звено, несущее боковое колесо, со звеном, скользящим но поперечной балке, связанным с рамой шасси.
3.Форма выполнения стабилизатора по пи. 1-2, отличающаяся тем, что, с целью автоматической стабилизации вертикального положения самохода, солнечные колеса дифференциала снабжены тормозами, управляемыми при помощи коромысла, соединенного с маятником.
4.Форма выполнения стабилизатора по пп. 1-3, отличающаяся тем, что, с целью предотвращения самопроизвольного подъема и опускания бокового колеса, винт осуществлен самотормозящим.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической установки в вертикальное положение самоходной повозки | 1949 |
|
SU86795A1 |
| Устройство для сохранения вертикального положения остова горного самохода | 1952 |
|
SU98903A1 |
| Устройство для стабилизации вертикального положения горного самохода при движении его по горным склонам | 1957 |
|
SU112762A1 |
| Устройство для стабилизации вертикального положения горного самохода при движении его по горным склонам | 1957 |
|
SU113712A2 |
| Устройство для сохранения вертикального положения остова горного самохода | 1955 |
|
SU101620A2 |
| Культиватор для работы на склонах | 1957 |
|
SU111986A1 |
| Шпалораскладчик | 1976 |
|
SU658204A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1063303A1 |
| КОМБИНИРОВАННЫЙ МОСТ СДВОЕННЫХ КОЛЕС | 2015 |
|
RU2582001C1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |