1
Изобретение относится к машиностроению и может быть использовано в роботахманипуляторах.
Известен привод манипулятора, содержащий корпус, силовой цилиндр, ведущую и ведомую шестерни 1.
Известный привод не позволяет проводить быстрый разгон при трогании с места и эффективное торможение в конце рабочего хода.
Цель изобретения - повышение быстоодействия привода.
Поставленная цель достигается тем, что шток силового цилиндра снабжен подвижными вдоль его оси направляющими, на которых закреплена ось ведущей шестерни, а ось ведомой шестерни шарнирно смонтирована в корпусе и установлена эксцентрично относительно ведущей шестерни, причем силовой цилиндр закреплен в корпусе шарнирно, а на штоке силового цилиндра выполнена рейка.
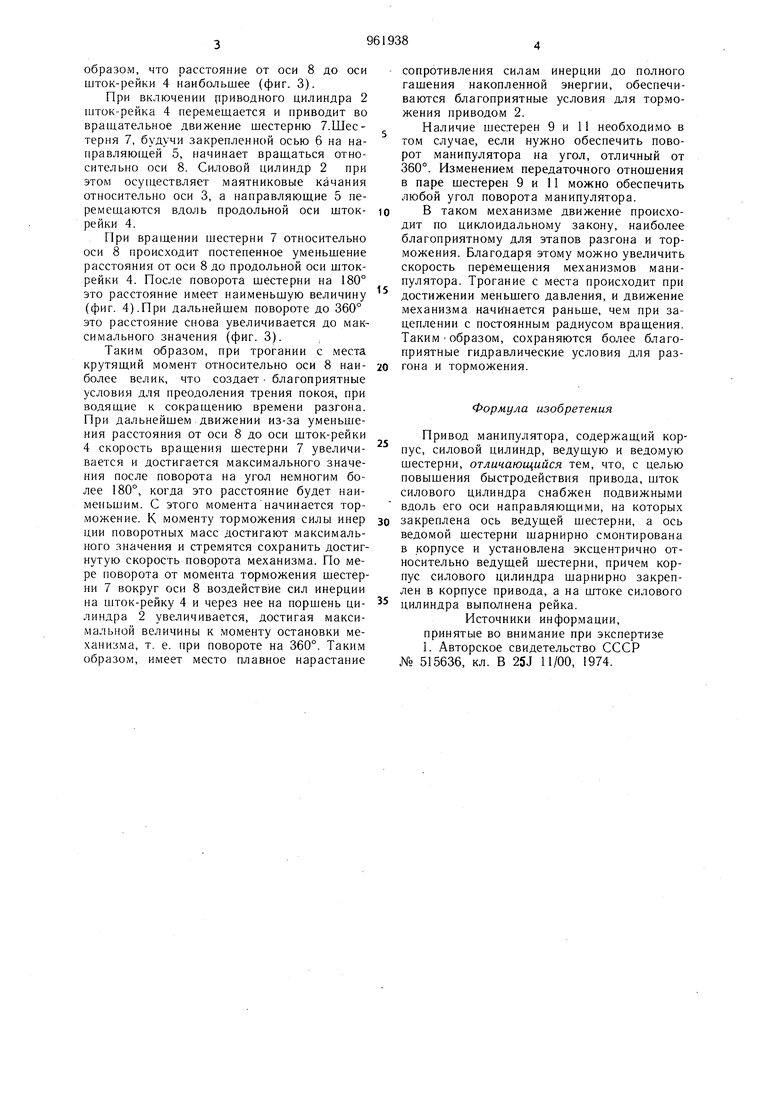
На фиг. 1 изображен привод манипулятора в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 и 4 - фаза работы привода.
Привод манипулятора содержит корпус 1, приводной цилиндр 2, шарнирно связан-, ный с корпусом 1 осью 3, шток-рейку 4. которая может перемещаться в направляющей 5. Направляющая 5 представляет собой кронштейн, в котором с одной стороны установлена на подшипниках ось 6 шестерни 7, а с другой - втулки скольжения, в которых по ходовой посадке расположена штикрейка 4. Направляющая 5 обеспечивает кинематическую связь шестерни 7 и штокрейки 4.
На шестерне 7 эксцентрично ее оси 6 жестко закреплена ось 8 шестерни 9, имеющая возможность вращаться в подшипниках 10,установленных в корпусе 1. Шестер 5 ня 9 входит в зацепление с шестерней 11, ось которой также смонтирована в корпусе 1. Пара шестерен 9 и 11 является вспомогательной и ее отношение зависит от угла поворота исполнительного органа маии20 пулятора (не показан).
Привод манипулятора работает с.кмхющим образом.
В исходном положении . i ii;iходится в зацеплении с шестерь.-- 7 таким
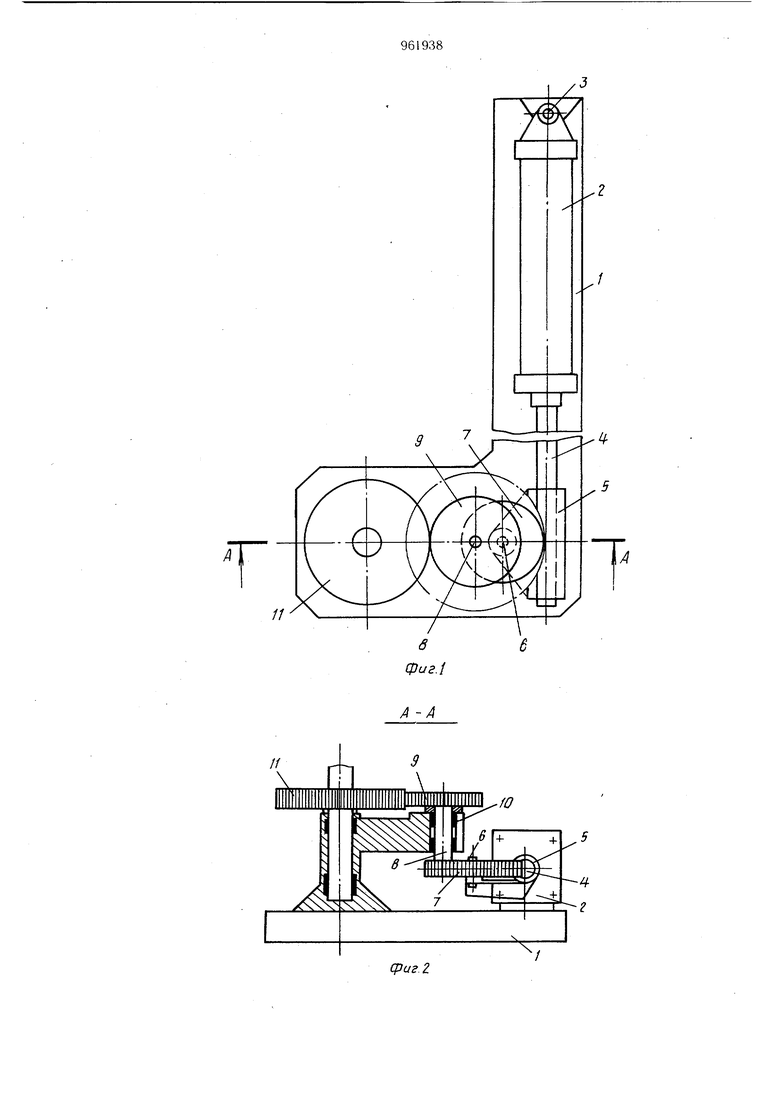
образом, что расстояние от оси 8 до оси шток-рейки 4 наибольшее (фиг. 3).
При включении рриводного цилиндра 2 iuTOK-рейка 4 перемешается и приводит во вращательное движение шестерню 7.Шестерня 7, будучи закрепленной осью 6 на направляющей 5, начинает вращаться относительно оси 8. Силовой цилиндр 2 при этом осуществляет маятниковые качания относительно оси 3, а направляющие 5 перемещаются вдоль продольной оси штокрейки 4.
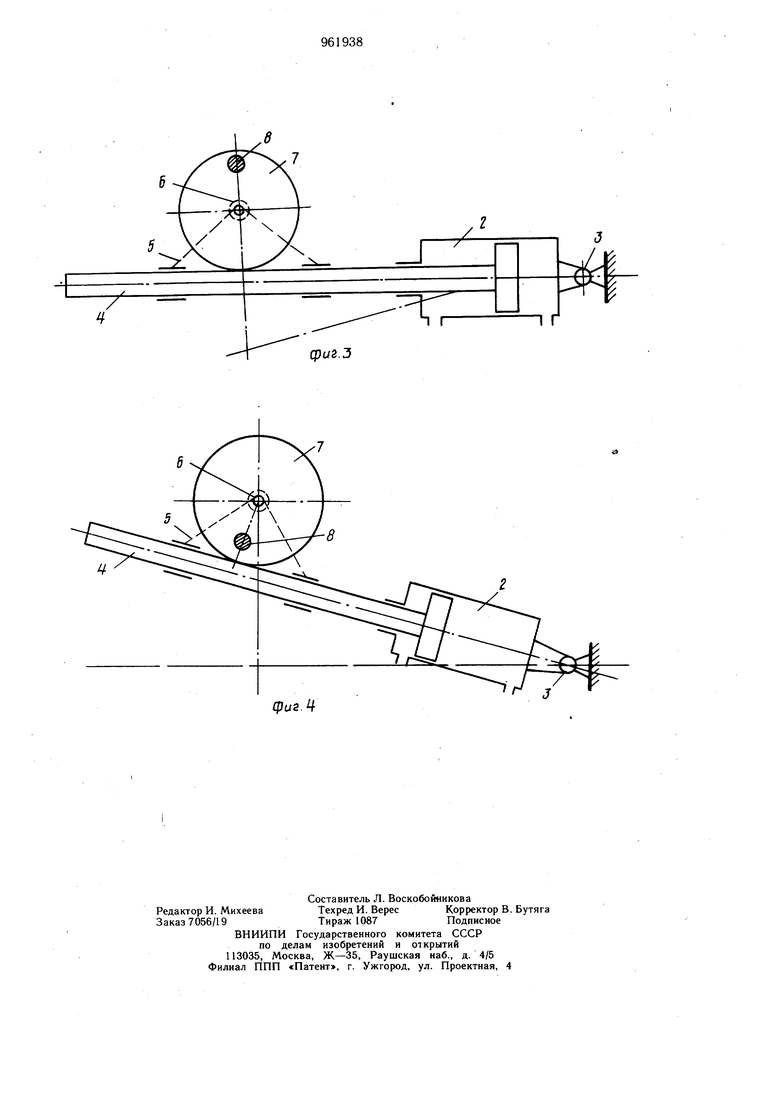
При вращении шестерни 7 относительно оси 8 происходит постепенное уменьшение расстояния от оси 8 до продольной оси штокрейки 4. После поворота шестерни на 180° это расстояние имеет наименьщую величину (фиг. 4).При дальнейшем повороте до 360° это расстояние снова увеличивается до максимального значения (фиг. 3).
Таким образом, при трогании с места крутящий момент относительно оси 8 наиболее велик, что создает благоприятные условия для преодоления трения покоя, при водящие к сокращению времени разгона. При дальнейшем движении из-за уменьшения расстояния от оси 8 до оси шток-рейки 4 скорость вращения шестерни 7 увеличивается и достигается максимального значения после поворота на угол немногим более 180°, когда это расстояние будет наименьшим. С этого моментаначинается торможение. К моменту торможения силы инер ции поворотных масс достигают максимального значения и стремятся сохранить достигнутую скорость поворота механизма. По мере поворота от момента торможения шестерни 7 вокруг оси 8 воздействие сил инерции на шток-рейку 4 и через нее на поршень цилиндра 2 увеличивается, достигая максимальной величины к моменту остановки механизма, т. е. при повороте на 360°. Таким образом, имеет место плавное нарастание
сопротивления силам инерции до полного гашения накопленной энергии, обеспечиваются благоприятные условия для торможения приводом 2.
Наличие шестерен 9 и 11 необходимо- в том случае, если нужно обеспечить поворот манипулятора на угол, отличный от 360°. Изменением передаточного отношения в паре шестерен 9 и 11 можно обеспечить любой угол поворота манипулятора.
0 В таком механизме движение происходит по циклоидальному закону, наиболее благоприятному для этапов разгона и торможения. Благодаря этому можно увеличить скорость перемещения механизмов манипулятора. Трогание с места происходит при достижении меньшего давления, и движение механизма начи нается раньше, чем при зацеплении с постоянным радиусом вращения. Таким образом, сохраняются более благоприятные гидравлические условия для разгона и торможения.
Формула изобретения
Привод манипулятора, содержащий корпус, силовой цилиндр, ведущую и ведомую шестерни, отличающийся тем, что, с целью повышения быстродействия привода, щток силового цилиндра снабжен подвижными вдоль его оси направляющими, на которых закреплена ось ведущей шестерни, а ось ведомой шестерни шарнирно смонтирована в корпусе и установлена эксцентрично относительно ведущей шестерни, причем корпус силового цилиндра шарнирно закреплен в корпусе привода, а на штоке силового цилиндра выполнена рейка.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 515636, кл. В 25J 11/00, 1974.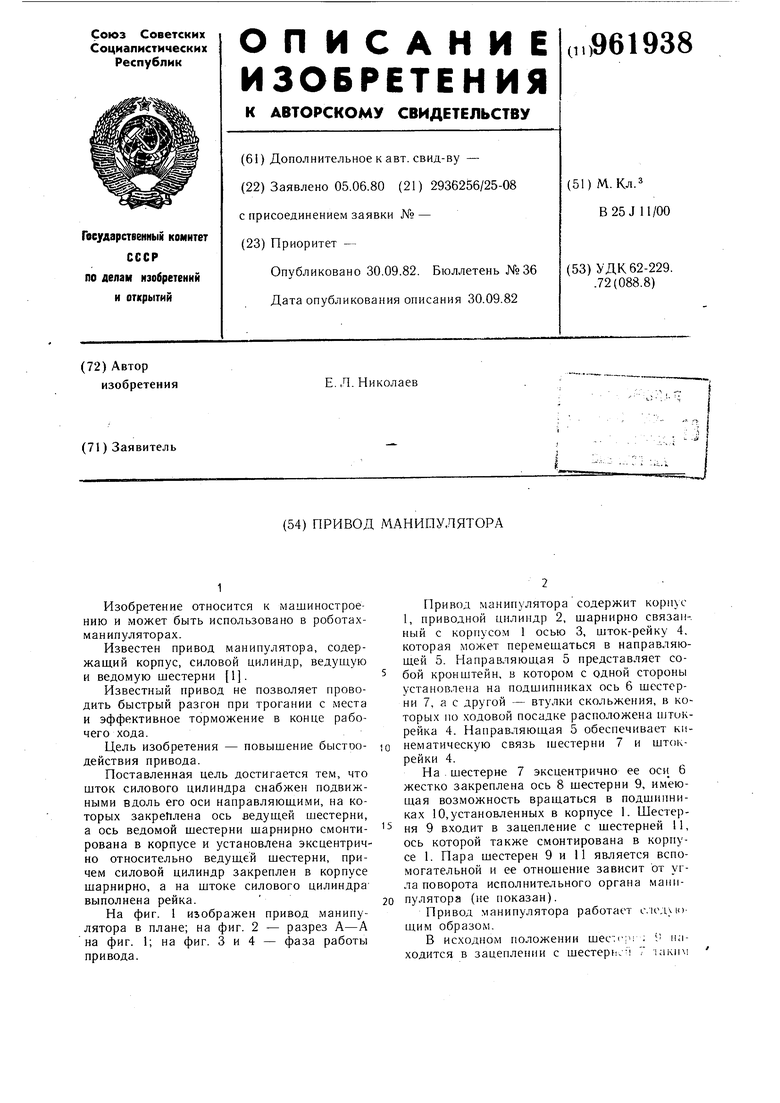
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1985 |
|
SU1293018A1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| Многошпиндельная головка | 1990 |
|
SU1756028A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1085750A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Стенд для испытаний предохранительных муфт | 1987 |
|
SU1504535A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
If
ери г. 2
