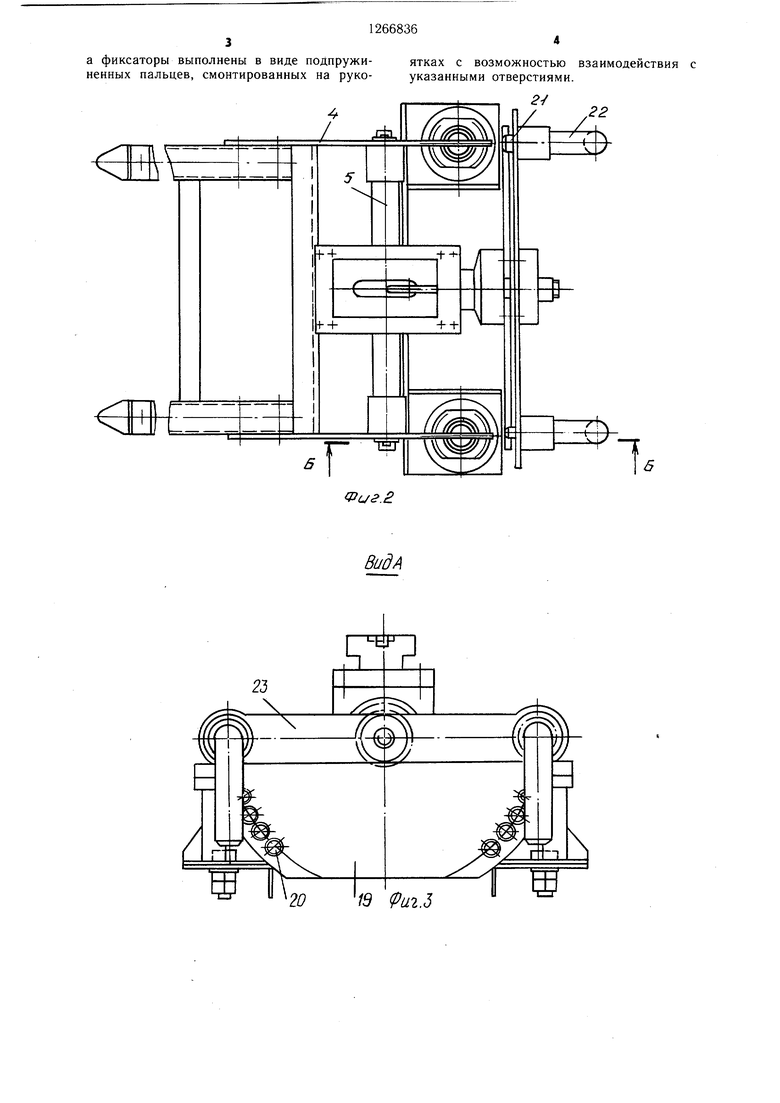
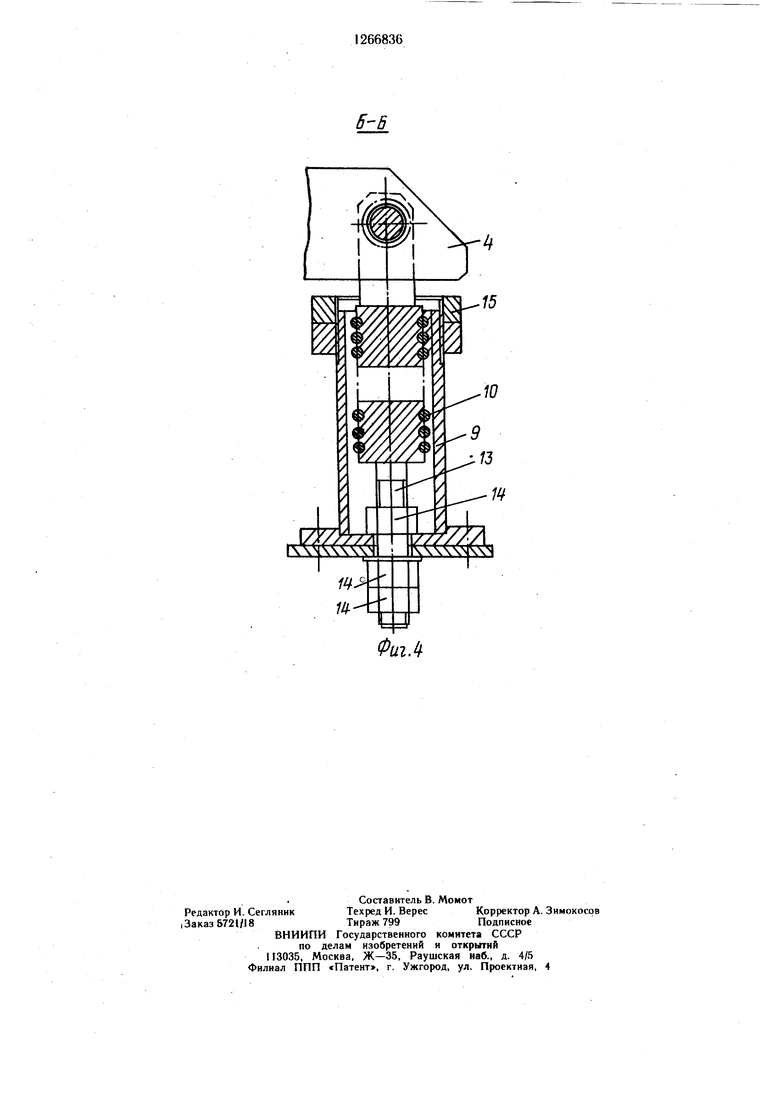
Изобретение относится к грузозахватным устройствам, навешиваемым на подъемнотранспортные машины, например манипуляторы, и может быть использовано, в частности, при загрузке и выгрузке поддоновс деталями в камерные электропечи. Цель изобретения - повышение удобства эксплуатации. На фиг. 1 представлен обш,ий вид вилочного захвата, вид сбоку, (разрез); на фиг. 2 - то же, вид сверху; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2. Вилочный захват содержит вилы 1, выполненные в виде жесткой П-образной рамы, на которой установлены упоры 2 и 3 для поддонов или контейнеров. Вилы 1 жестко соединены с концами двуплечих рычагов 4, а последние шарнирно соединены с цапфами 5, симметрично расположенными на боковых поверхностях кронштейна 6, неподвижно установленного на горизонтальном валу 7. К кронштейну 6с цапфами 5 приварен вертикальный лист 8 с отогнутыми горизонтальными площадками для установки стаканов 9 с компенсирующими пружинами 10, который одними концами соединены с этими площадками, а другими - со свободными концами двуплечих рычагов 4. Жесткость вертикального листа 8 обеспечивается наклонными ребрами 11 и вертикальными ребрами 12, служащими одновременно опорными элементами при установке захвата на горизонтальную поверхность. Регулировка натяжения пружин 10 осуш,ествляется с помощью винта 13 и гаек 14. Горизонтальность положения вил 1 обеспечивается регулировкой гаек 15, устанавливающих зазор между концами рычагов 4.и стаканами 9. Горизонтальный вал 7 смонтирован в корпусе 16, который посредством плиты 17 соединен со схватом манипулятора. Корпус 16 расположен симметрично относительно оси подвеса захвата, совпадающей с вертикальной осью штанги манипулятора. К корпусу 16 жестко прикреплена втулка 18 с вертикальным диском 19, выполненным с отверстиями 20 для фиксации промежуточных положений вил 1, осуществляемой подпружиненными пальцами 21, смонтированными на рукоятках 22, предназначенных для поворота кронштейна 6 с вилами 1 и закрепленных на планке 23, жестко установленной на валу 7. Вилочный захват работает следующим образом. Вилочный захват навещивается на манипулятор посредством плиты 17. Рукоятками 22 оператор-вводит вилы 1 в пазы поддона с грузом до фиксации последнего в упорах 2 и 3. Подъем захвата осуществляется манипулятором. Нагрузка массы поддона передается посредством рычагов 4 на пружины 10, установленные в стаканах 9 на горизонтальных площадках вертикального листа 8. Это позволяет захвату сохранять горизонтальное положение в загруженном состоянии. При массе разовой загрузки камерных печей в пределах 100 кг имеющиеся в номенклатуре пружины растяжения обеспечивают горизонтальность вил 1. При этом жесткость пружин 10 определяется для каждого конкретного случая необходимой грузоподъемностью вил 1. В незагруженном состоянии горизонтальность положения захвата может дополнительно регулироваться натяжением пружин 10 с помощью винта 13 и гаек 14 и осуществляется установкой постоянного зазора между поверхностью концами рычагов 4 и стаканов 9 гайками 15 в загруженном состоянии. За счет жесткости соединения схвата манипулятора с плитой 17 и корпусом 16 вилы 1 рычаги 4 и компенсирующий узел (кронщтейн 6 с цапфами 5 и стаканом 9 с пружиной 10) при воздействии оператора на рукоятки 22 поворачиваются вокруг горизонтальной оси захвата на валу 7, занимая фиксированные положения, которые обеспечиваются соосной установкой подпружиненного пальца 21 в одном из отверстий 20, выполненных в диске 19, что позволяет, например,, постепенно перегружать нагретые детали из поддона в закалочные ванны, предотвращая разбрызгивание раствора. Воздействие оператора на рукоятки 22 заключается в горизонтальном перемещении их на себя. При этом, жестко связанные с рукоятками 22 подпружиненные пальцы 21 выходят из отверстия 20 диска 19, что обеспечивает возможность поворота вил вокруг горизонтальной оси. Обеспечение фиксации промежуточных положений вил 1 повышает безопасность работы оператора при про ведении процессов термообработки. Жесткость компенсируюшего узла при повороте вокруг вала 7 обеспечивается ребрами 11 и 12. Формула изобретения 1.Вилочный захват подъемно-транспортной машины, содержащий монтируемый на ней корпус,, установленный в последнем горизонтальный вал, жестко соединенный с ним кронщтейн и вилы, отличающийся тем, что, с целью повышения удобства эксплуатации, он снабжен шарнирно связанными с кронштейном с возможностью поворота в вертикальной плоскости двуплечими рычагами, одно плечо каждого из которых жестко соединено с вилами, а другое подпружинено относительно кронштейна, жестко связанными с валом рукоятками для поворота кронштейна с вилами и фиксаторами для ограничения указанного поворота. 2.Захват по п. 1, отличающийся тем, что он снабжен жестко соединенным с корпусом вертикальным диском с отверстиями. 34
а фиксаторы выполнены в виде поДпружи-ятках с возможностью взаимодействия с
ненных пальцев, смонтированных на руко-указанными отверстиями.
иг..
1266836 
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват | 1989 |
|
SU1794710A1 |
| Рабочее оборудование бордюроукладчика | 1988 |
|
SU1585425A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Захватное устройство | 1988 |
|
SU1625803A1 |
| Вилочный захват | 1980 |
|
SU927739A1 |
| ВИЛОЧНЫЙ ЗАХВАТ | 1992 |
|
RU2047551C1 |
| Крановый вилочный захват | 1978 |
|
SU779256A1 |
Изобретение относится к грузозахватным устройствам, навешиваемым на подъемно-транспортные машины, например манипуляторы, и повышает удобство эксплуатации. Захват прицепляется к манипулятору плитой 17 корпуса 16. Рукоятками 22 оператор вводит вилы I в пазы поддона. Нагрузка от веса передается посредством рычагов на пружины, что позволяет захвату сохранять горизонтальное положение. В незагруженном состоянии горизонтальность захвата регулируется натяжеиием пружин винтом и гайками. Для разгрузки поддона оператор воздействует на рукоятки 22, вилы I поворачиваются на валу 7, занимая фиксированные положення, которые обеспечиваются соосной установкой подпружииениого пальца в одном из отверстий, выполненных в диске 19. 1 3. п. ф-лы, 4 ил. /2fPi/f.
(С
Раг.2
ФигЛ
| Кантователь контейнеров к вилочному погрузчику | 1980 |
|
SU927741A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
