(54) ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический подъемник | 1982 |
|
SU1208008A1 |
| Пневматический подъемник | 1981 |
|
SU962193A1 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Подъемник-опрокидыватель для автомобилей | 1984 |
|
SU1217777A1 |
| Способ и устройства механической обработки шатунных шеек крупногабаритного коленчатого вала на токарном станке | 2015 |
|
RU2625151C2 |
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛЛОННЫЙ ПИСТОЛЕТ | 2000 |
|
RU2172459C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ КАРДАННЫХ ВАЛОВвс?^со;озн^.ПАШи1и-Г..л;';Г'''Б^^БЛИО: ^.•'-' | 1973 |
|
SU366054A1 |
| ОТКРЫВАЮЩАЯСЯ КРЫША КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ И УСТРОЙСТВО ДЛЯ ЕЕ ПЕРЕМЕЩЕНИЯ | 2004 |
|
RU2308389C2 |
| Переносной грузоподъемный кран | 1990 |
|
SU1801930A1 |
Изобретение относится к грузоподъемным механизмам, а именно к подъёмникам для вывешивания транспортных средств.
Известен пневматический подъемник, содержащий жестко установленную на опорной плите направляющую стойку, взаимодействующую с подвижным корпусом, имеющим грузовую головку, пнев моцилиндры для его перемещения и фиксирующее устройство,1.
Недостатком его является неудобство и недостаточная безопасность его эксплуатации, так как фиксация и расфикеация поднятой грузовой головки осуществляется принудительным вращением и перемещением гайки на штоке от внешнего привода, а также сложность конструкции.
Цель изобретения - упрощение его конструкции и повышение безопасности путем автоматической фиксации и расфиксации поднятой грузовой головки,
Указанная цель достигается тем, что фиксирующее устройство включает в себя шарнирно установленную на подвижном корпусе скобу, связанной с , не$ посредством оси угловой рычаг с пальцем, и тягу, один конец которой
с помощью пальца, соединен с угловым рычагом, а на другом конце шарнирно установлена подпружиненная собачка, причем в подвижном корпусе выполнена фигурная прорезь, а направляющая стойка снабжена закрепленным на ней штифтом, взаимодействующим с фигурной прорезью.
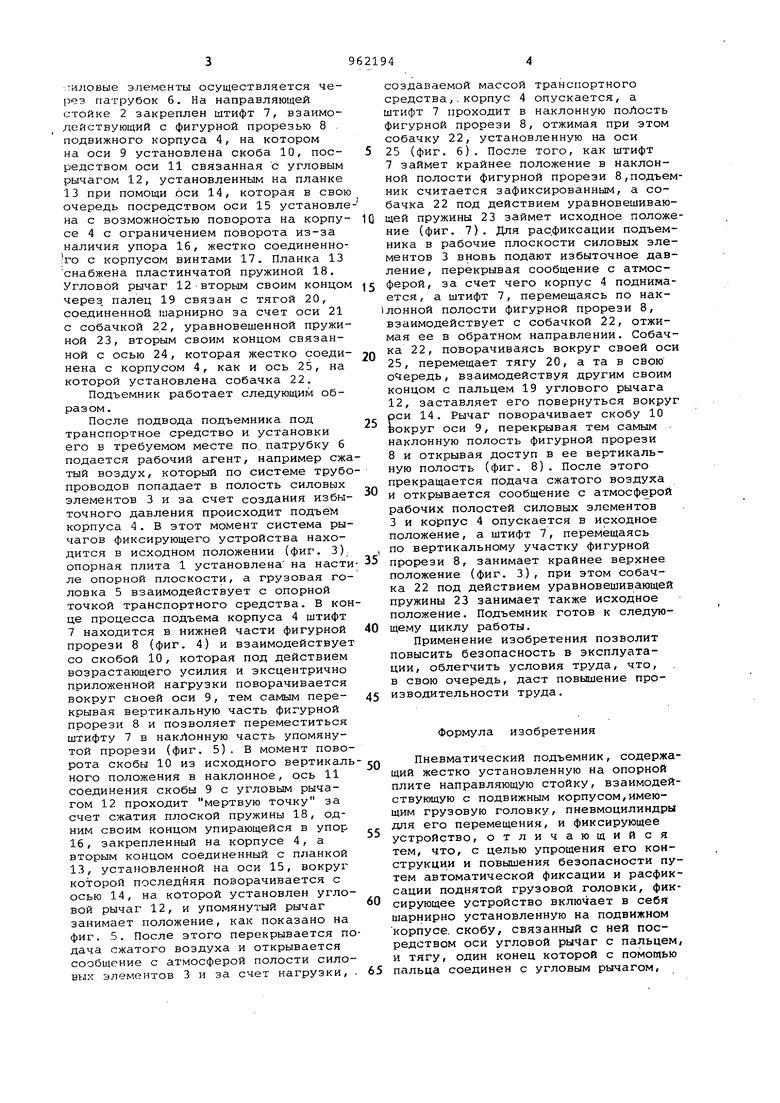
На фиг. 1 изображен предлагаемый
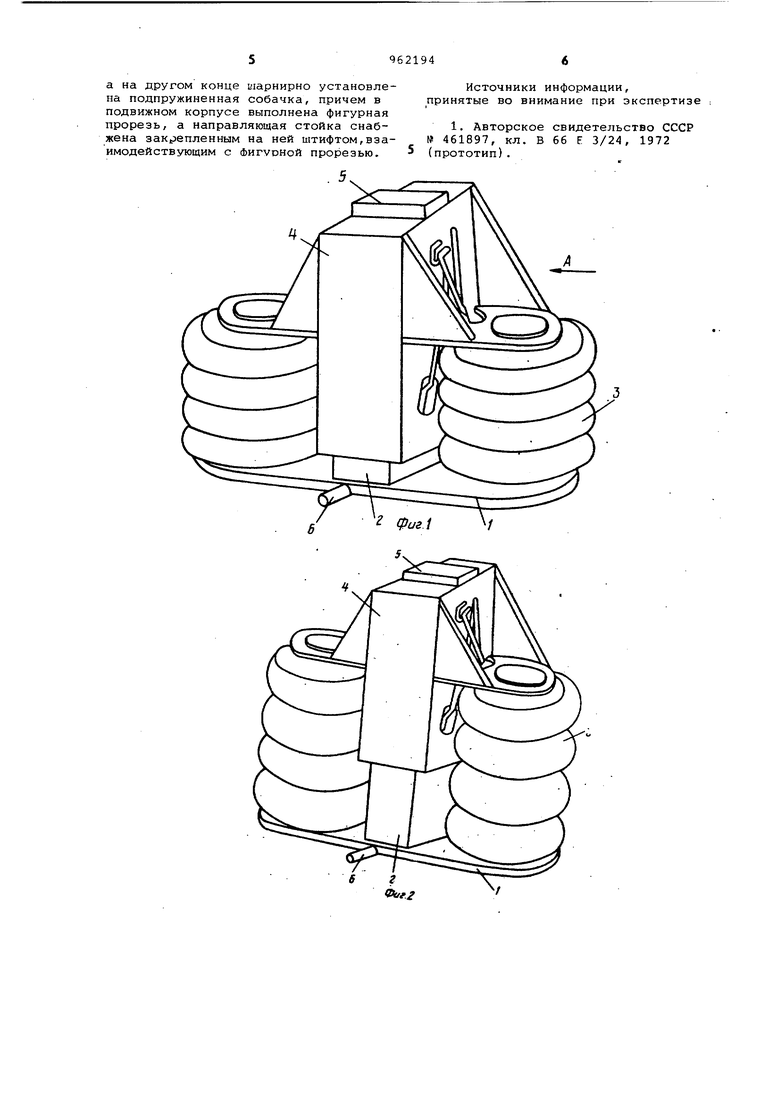
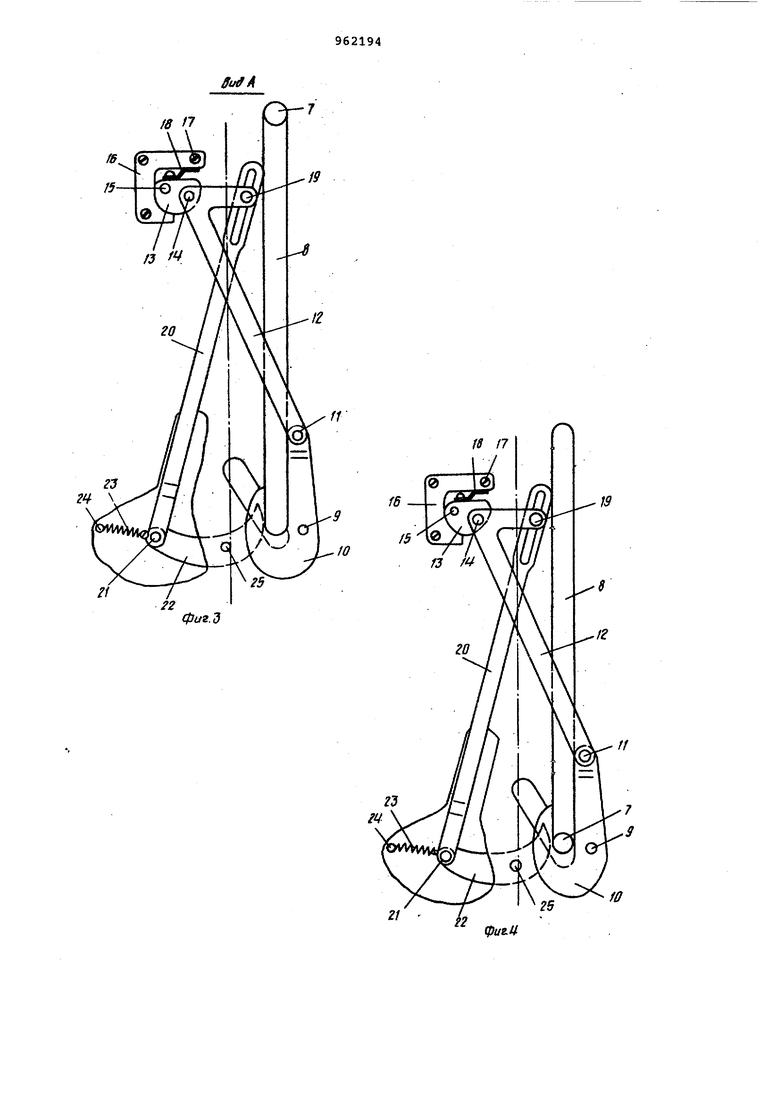
10 подъемник в опущенном (нерабочем) состоянии, общий вид; на фиг. же, в рабочем (выдвинутом ) положении; на фиг. 3 -1ВИД по стрелке А .на фиг. 1; на фиг. 4 - фиксирующее уст- .
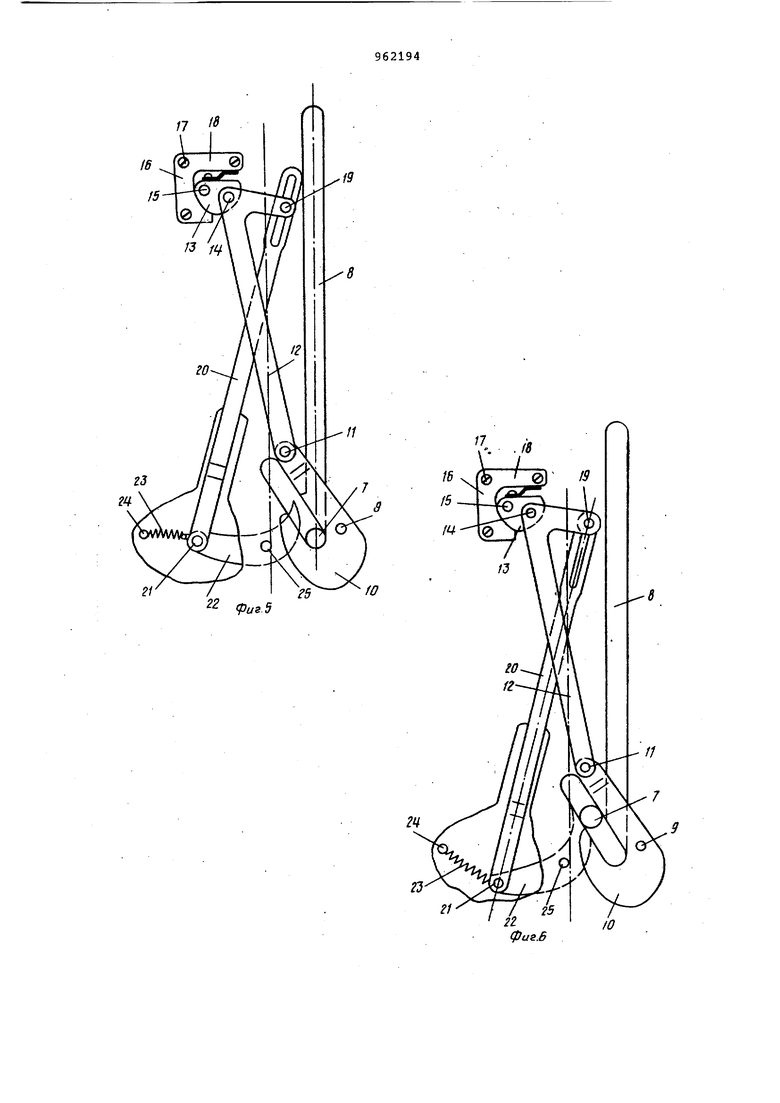
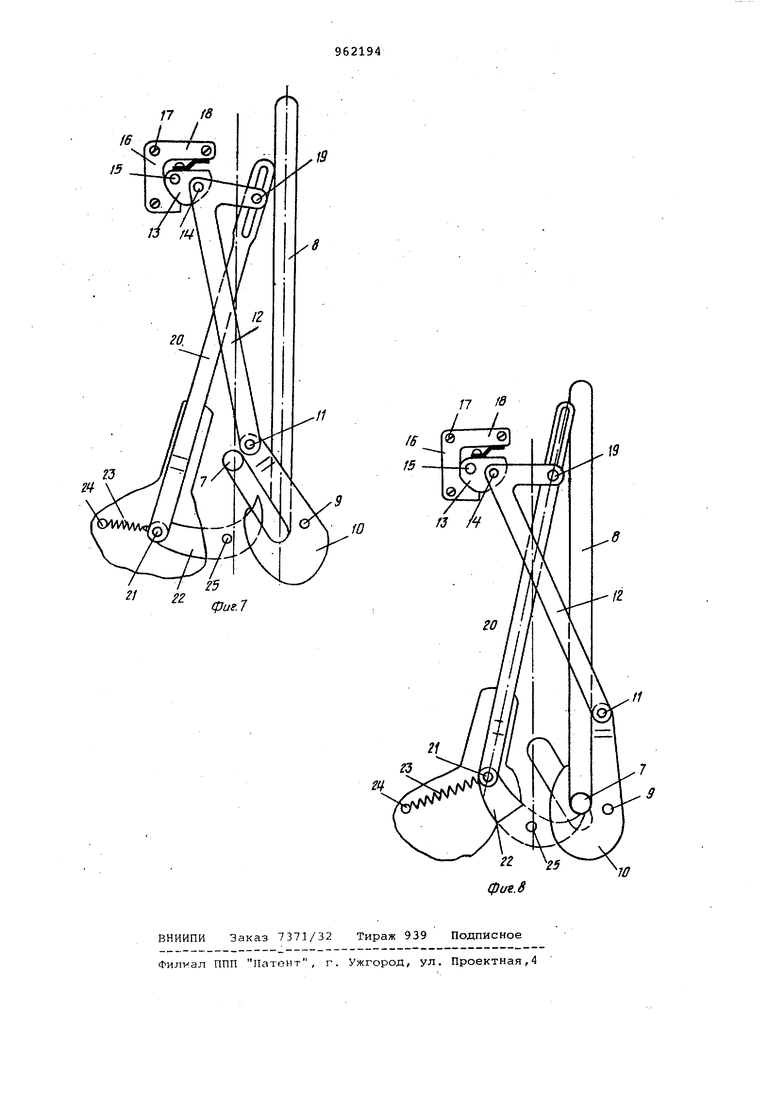
15 ройство при выдвинутом.подвижном корпусе, но не в зафиксированном положении; на фиг. 5 - то же, в момент изменения направления перемещения штифта; на фиг. 6 - то же, в промежуточ20ный момент прохода штифта над собачкой; на фиг. 7 - то же, в зафиксированном положении} на фиг. 8 - то же, в момент расфиксации и возврата в исходное положение.
25
Подъемник состоит из опорной плиты 1, направляющей стойки 2, жестко закрепленной на плите, и силовых элементов 3, соединенных с подвижным корпусом 4,- снабженным грузовой го.-.
30 лавкой 5. Подача рабочего агента в
,:иловые элементы осуществляется через патрубок 6. На направляющей стойке 2 закреплен штифт 7, взаимодействующий с фигурной прорезью 8 , подвижного корпуса 4, на котором на оси 9 установлена скоба 10, посредством оси 11 связанная с угловым рычагом 12, установленным на планке 13 при помощи оси 14, которая в свою очередь посредством оси 15 установлена с возможностью поворота на корпусе 4 с ограничением поворота из-за наличия упора 16, жестко соединенно1го с корпусом винтами 17. Планка 13 снабжена пластинчатой пружиной 18, Угловой рычаг 12 вторым своим концом через, палец 19 связан с тягой 20, соединенной шарнирно за счет оси 21 с собачкой 22, уравновешенной пружиной 23, вторым своим концом связанной с осью 24, которая жестко соединена с корпусом 4, как и ось 25, на которой установлена собачка 22.
Подъемник работает следующим образом.
После подвода подъемника под транспортное средство и установки его в требуемом месте по. патрубку 6 подается рабочий агент, например сжатый воздух, который по системе трубопроводов попадает в полость силовых элементов 3 и за счет создания избыточного давления происходит подъём корпуса 4. В этот момент система рычагов фиксирующего устройства находится в исходном положении (фиг. 3); опорная плита 1 установлена на настиле опорной плоскости, а грузовая головка 5 взаимодействует с опорной точкой транспортного средства. В конце процесса подъема корпуса 4 штифт 7 находится в нижней части фигурной прорези 8 (фиг. 4) и взаимодействует со скобой 10, которая под действием возрастающего усилия и эксцентрично приложенной нагрузки поворачивается вокруг своей оси 9, тем самым перекрывая вертикальную часть фигурной прорези 8 и позволяет переместиться штифту 7 в накЛонную часть упомянутой прорези (фиг. 5). В момент поворота скобы 10 из исходного вертикального положения в наклонное, ось 11 соединения скобы 9 с угловым рычагом 12 проходит мертвую точку за счет сжатия плоской пружины 18, одним своим концом упирающейся в упор 16, закрепленный на корпусе 4, а вторым концом соединенный с планкой 13, установленной на оси 15, вокруг которой последняя поворачивается с осью 14, на которой установлен угловой рычаг 12, и упомянутый рычаг занимает положение, как показано на фиг. 5. После этого перекрывается подача сжатого воздуха и открывается сообщение с атмосферой полости силовык элементов 3 и за счет нагрузки,
создаваемой массой транспортного средства,,корпус 4 опускается, а штифт 7 проходит в наклонную поЛость фигурной прорези 8, отжимая при этом собачку 22, установленную на оси 25 (фиг. 6). После того, как штифт
7займет крайнее положение в наклонной полости фигурной прорези 8,подъемник считается зафиксированным, а собачка 22 под действием уравновешивающей пружины 23 займет исходное положение (фиг. 7). Для расфиксации подъемника в рабочие плоскости силовых элементов 3 вновь подают избыточное давление, перекрывая сообщение с атмосферой, за счет чего корпус 4 поднимается, а штифт 7, перемещаясь по нак)лонной полости фигурной прорези 8, взаимодействует с собачкой 22, отжимая ее в обратном направлении. Собачка 22, поворачиваясь вокруг своей оси 25, перемещает тягу 20, а та в свою о ередь, взаимодействуя другим своим концом с пальцем 19 углового рычага 12, заставляет его повернуться вокруг реи 14. Рычаг поворачивает скобу 10 вокруг оси 9, перекрывая тем самым наклонную полость фигурной прорези
8и открывая доступ в ее вертикальную полость (фиг. 8). После этого прекращается подача сжатого воздуха и открывается сообщение с атмосферой рабочих полостей силовых элементов
3 и корпус 4 опускается в исходное положение, а штифт 7, перемещаясь по вертикальному участку фигурной прорези 8, занимает крайнее верхнее положение (фиг. 3.) , при этом собачка 22 под действием уравновешивающей пружины 23 занимает также исходное положение. Подъемник готов к следующему циклу работы.
Применение изобретения позволит повысить безопасность в эксплуатации, облегчить условия труда, что, в свою очередь, даст повышение производительности труда.
Формула изобретения
Пневматический подъемник, содержащий жестко установленную на опорной плите направляющую стойку, взаимодействующую с подвижным корпусом,имеющим грузовую головку, пневмоцилиндры для его перемещения, и фиксирующее устройство, отличающийся тем, что, с целью упрощения его конструкции и повышения безопасности путем автоматической фиксации и расфиксации поднятой грузовой головки, фиксирующее устройство включает в себя шарнирно установленную на подвижном корпусе, скобу, связанный с ней посредством оси угловой с пальцем, и тягу, один конец которой с помощью пальца соединен с угловым рычагом.
а на другом конце ыарнирно установлена подпружиненная собачка, причем в подвижном корпусе выполнена фигурная прорезь, а направляющая стойка снабжена закрепленным на ней штифтом,взаимодействующим с ФИГУРНОЙ прорезью.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР № 461897, кл. В 66 F 3/24, 1972 (прототип).
18 /7
Гб
t5
//
фиг.д
W
to
фиг. 14
в
/7
19
(риг 5
