(54) УСТРОЙСТВО ДЛЯ МОНТАЖА СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесное захватное устройство к транспортному средству | 1980 |
|
SU918266A1 |
| Устройство для монтажа строительных конструкций | 1979 |
|
SU861290A1 |
| Монтажный кран | 1985 |
|
SU1291534A1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| Лесозаготовительная машина | 1980 |
|
SU1026713A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА«ик.;1^Л>&Юс$НАЯШ1цт~штчЕн^1^4Н&Л!/,иГЕНА | 1972 |
|
SU344714A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2002 |
|
RU2202877C1 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
| Трубоукладчик | 1990 |
|
SU1766833A1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
Изобретение относится к подъемнотранспортной технике и может быть использовано для монтажа и транспортирования строительных конструкций,преимущественно стеклянных панелей и витрин строящихся зданий.
Наиболее близким по технической сущности и достигаемому результату является устройство для монтажа строительных конструкций, содержащее базовую самоходную машину с шарнирной поворотной мачтой, на которой смонтирована вакуум-захватная рама с вакуумными камерами и механизмы наводки монтируемых конструкций 1.
Недостатком указанного устройства является сложность и громоздкость механизмов наводки монтируемых конструкций, а также .большая продолжительность цикла монтажа и невысокая точность наводки.
Цель изобретения -. повышение производительности и точности монтажа.
Указанная цель достигается тем, что механизм наводки содержит корпус, соединенный с монтажной люлькой посредством универсального шарнира,установленную в корпусе выдвижную штангу, с шарнирно соединенным с ней рычагом, смонтированную на упомянутом рычаге раму с вакуумным захватом, причем рама имеет винтовой механизм для ее перемещения относительно рычага.
С целью захвата и монтажа конструкций различного размера ri веса, рама выполнена с Г-образными штангами, соединенными с вакуумными захватами, при этом один конец рычага шарнирно соединен с выдвижной штангой корпуса.
10
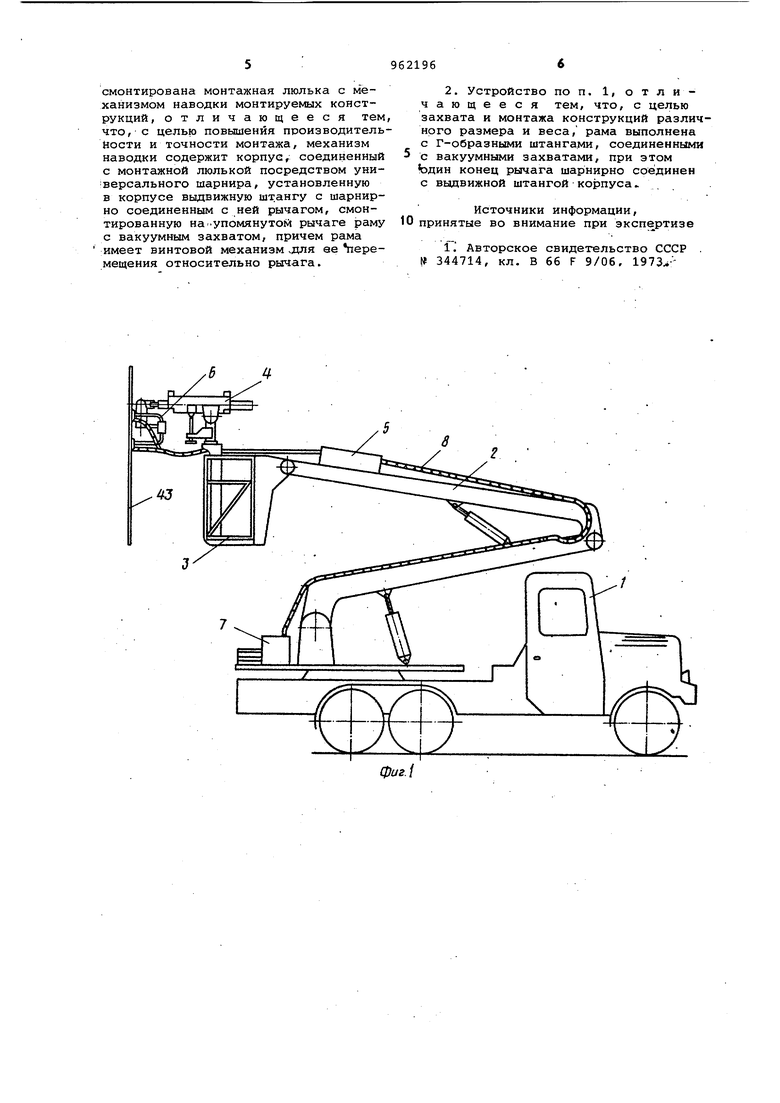
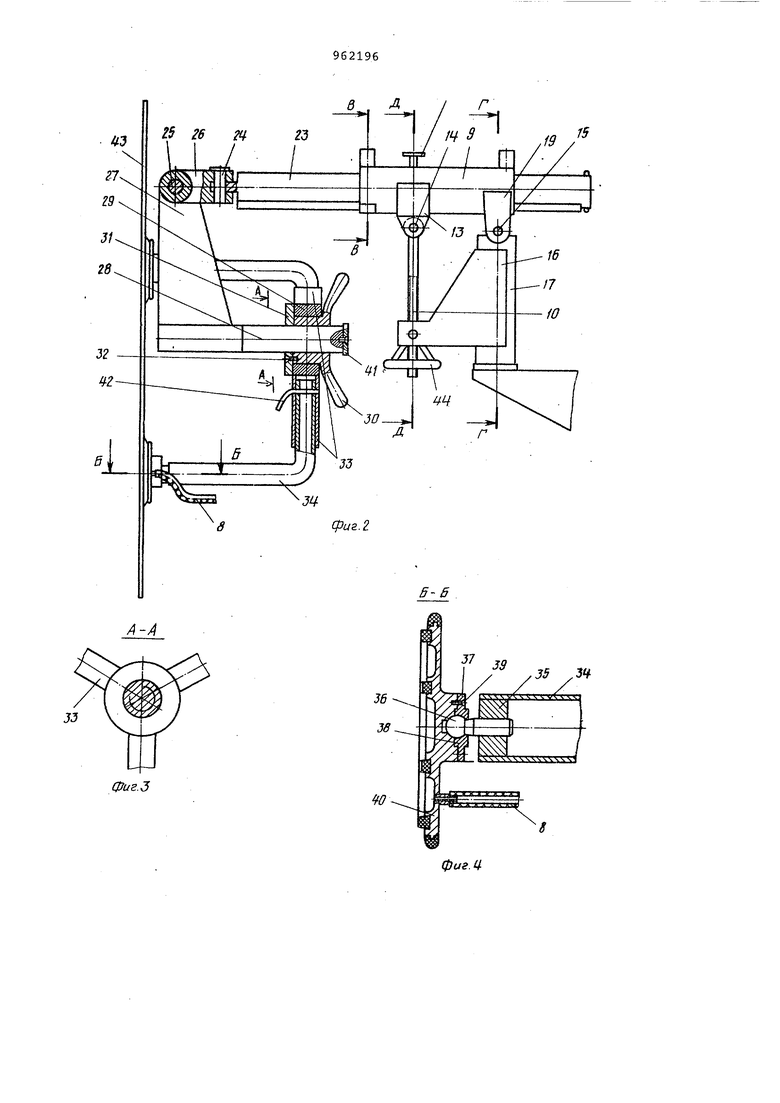
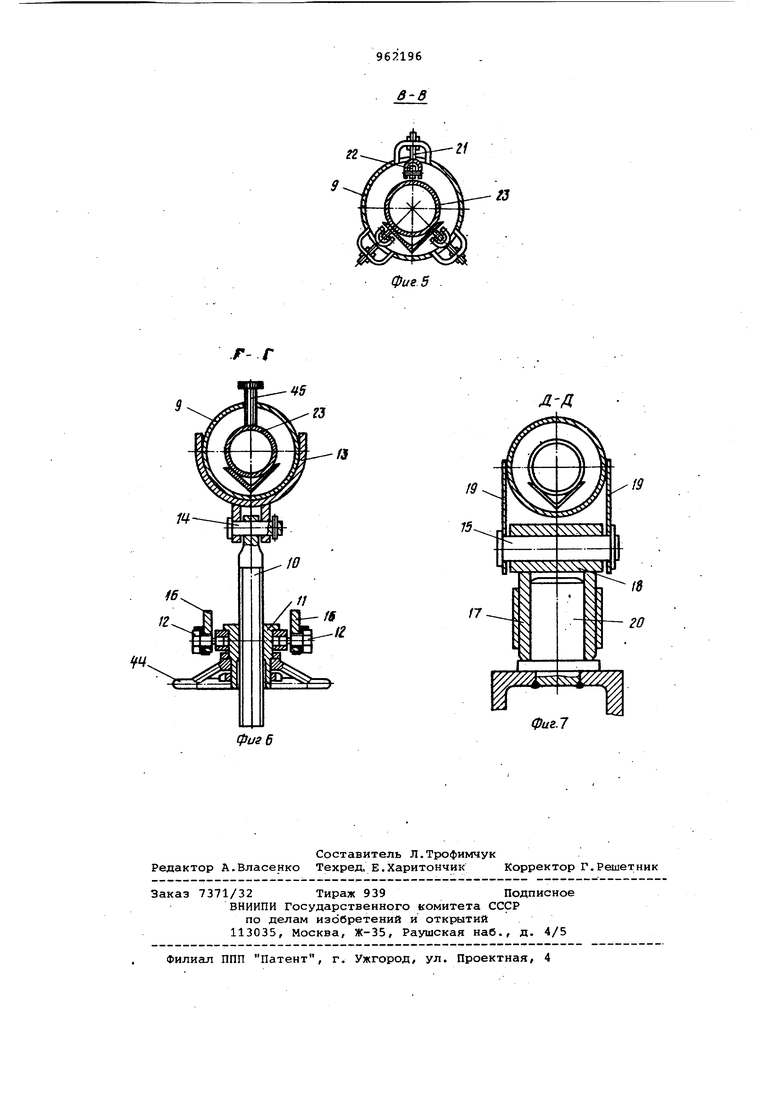
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 8 механизм наводки с рамой с вакуумными захватами; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на
15 фиг. 2; на фиг. 5 - раэрез В-В на фиг. 2; на фиг. 6 -разрез Г-Г на фиг. 2; на фиг. 7 - разрез Д-Д на фиг-.2,
Устройство для монтажа строительных конструкций содержит самоходное
20 шасси 1, несущее поворотную стрелу 2, на верхнем конце которой смонтирована монтажная люлька 3 с механизмом 4 наводки и ресивер 5. На механизме наводки 4 навешена рама 6 с вакуумным
25 захватом. На платформе самоходного шасси 1 установлен вакуумный насос 7, который приводится в движение от трансмиссии базовой машины и связан с ресивером 5 и рамой 6 вакуумными 30 трубопроводами 8.
Механизм 4 наводки содержит корпу 9, соединенный с .монтажной люлькой 3 посредством универсального шарнира, включающего винт 10, гайку 11, за-, крепленную на полуосях 12, ложемент 13, шарнирно связанный с винтом 10 при помощи осей 14 и 15. Полуоси 12 закреплены в щеках 16, приваренных к стакану 17 с приваренной к нему втулкой 18. К корпусу 9- приварены щеки -19, .которые шарнирно соединены с втулкой 18 осью 15. Стакан 17 посажен на вертикальную ось 20, котоjpaH жестко связана с монтажной люлькой 3. В корпусе 9 на регулируемых опорах 21 с подшипниками 22 установлена выдвижная штанга 23, с которой при помощи осей 24 и 25 через переходник 26 шарйирно соединен рычаг 21. На резьбовом конце 28 рычага 27 смонтирована рама 6 с вакуумным захватом. Рама 6 имеет винтовой механизм, состоящий из втулки 29 и гайки 30, для перемещения ее относительно рычага 27. Фиксациярамы 6 на гайке 30 осуществляется шайбой 31 и винтами 32. К втулке 29 под углом 120 друг к другу приварены три направляющие 33, в которых перемещаются Г-образные штанги 34, на концах которых при помощи шайб 35 приварены сферические пальцы 36.
На пальцах 36 с помощью полуколец 37 и 38 и винтов 39 посажены вакуум,рые захватные камеры (вакуумные захваты) 40. Ход рамы 6 по резьбовому концу 2-8 ограничен шайбой 41 и щеками рычага 27. ,
Выдвижные Г-образные штанги 34 стопорятся в направляющих 33 фиксаторами 42 в двух-трех положениях, чт позволяет захватывать и монтировать конструкции различного размера и веса.
Устройство при монтаже крупноразмерных стекол работает следующим образом.
Для захвата монтируемого стекла 43 из пирамиды стрела 2 складывается и механизм 4 наводки вместе с рамой 6 опускается вниз и накладывается на стекло. Затем вакуум-захватные камеры 40 соединяются с ресивером 5 и происходит захват стекла. Стекло 43 вместе с монтажниками, находящимися в люльке 3, подается к месту мбнтажа и наводится манипулированием стрелой 2 в положение, близкое к проектному.
Точная установка стекол в проектное положение производится механизмом 4 наводки. Вьвдвижением винта 10 при вращении маховика 44, жестко связанного с гайкой 11, осуществляется подъем или опускание рамы 6 вмест со стеклом 43 в вертикальном направлении.
При этом, поворачиваясь на оси 25 рама 6 со стеклом 43 остается в вертикальном положении.
Доводка стекла в горизонтальном направлении осуществляется поворотом корпуса 9 вокруг оси 28 и поворотом рычага 27с захватной рамой 6 на оси
Для предотвращения повреждения стекла в процессе установки в проектное положение при непредусмотренном резком опускании рамы 6 вниз, корпус 9 свободноопирается на ложемент 13. В случае возникновения вертикальных нагрузок на нижнюю кромку стекла 43 штанга 23 вместе с корпусом 9 приподнимается с ложемента 13 и поворачиваться вокруг оси 27, что предохраняет стекло от разрушения.
Конструкция paNKi 6 позволяет брат стекла различных размеров, для чего необходимо выдвинуть штанги 34 и застопорить их фиксаторами 42.
Навеска рамы 6 на рычаге 27 позволяет устанавливать стекла р-азличfjoro веса, причем так, чтобы при Ьодъеме стекло оставалось в вертикальном прложении. Это достигается тем, что опрокидывающий момент,создаваемый стеклом 43 относительно оси
25,уравновешивается моментом от веса конструкции рамы 6 относительно той же оси 25. Причем в зависимости от веса стекла соотношение расстояний от стекла до оси 25 и от центра тяжести рамы.6 до этой же оси,может меняться путем перемещения рамы 6
по резьбовому концу 28 рычага 27 вращением гайки 30.
Например, при весе рамы 6 в 20 кг минимальном расстоянии от стекла 43 до оси 25, равном 30.мм и длине резьбового конца 28, равном 150 мм, возможен подъем стекла до 100 кг.
В технических требованиях на машину для монтажа стеклоконструкций, разработанных ЦНИИОМТЛ, .потребность в таких машинах определена в 3500 -j штук на 1975 г., а экономическая эффективность определена в 7500 руб. в год.
Этот экономический эффект достигается за счет сокращения боя стекла от повреждений, повышения произво дительности труда рабочих, занятых на перегрузке и монтаже конструкций, более быстрого захвата и освобождения конструкций.
Формула изобретения
смонтирована монтажная люлька с механизмом наводки монтируемых конструкций, отличающееся тем, что, с целью повышения производительности и точности монтажа, механизм наводки содержит корпус, соединенный с монтажной люлькой посредством уни версального шарнира, установленную в корпусе выдвижную шт.ангу с шарнирно соединенным с ней рычагом, смонтированную на-упомянутой рычаге раму с вакуумным захватом, причем рама имеет винтовой механизм для ее перемещения относительно рычага.
Источники информации, принятые во внимание при экспертизе
21
Фив 5 .
45
а
фиг 5
Д-fl.
