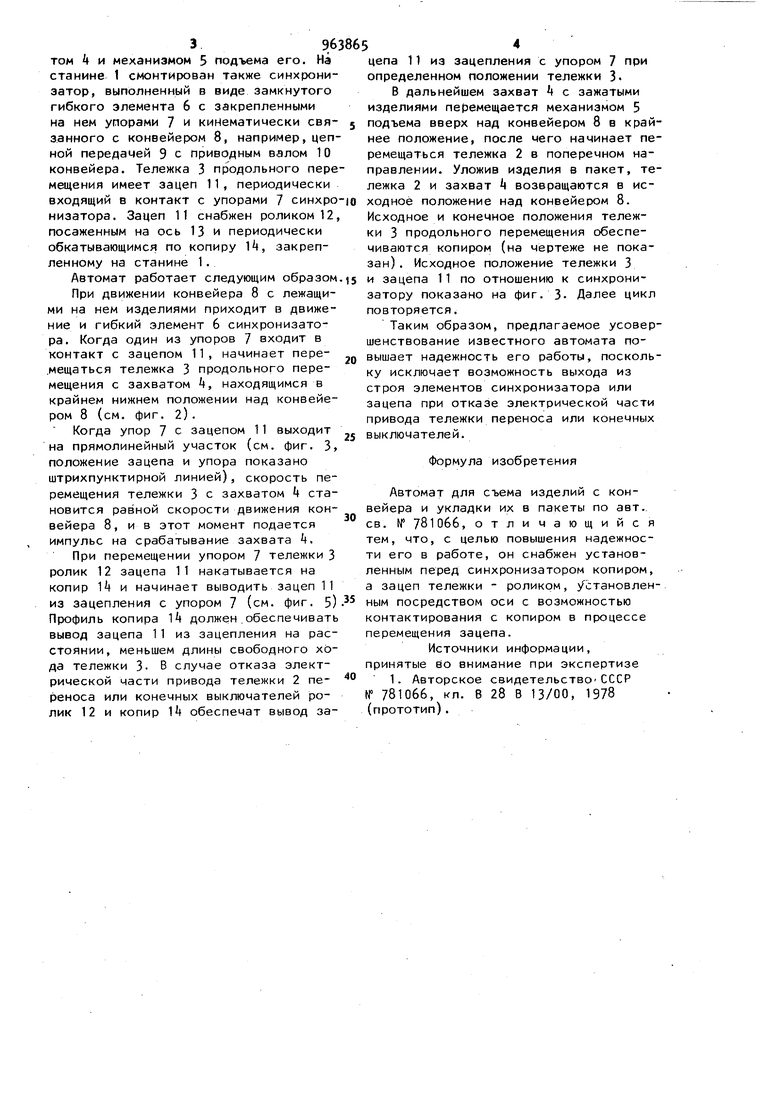
Изобретение относится к средствам механизации и автоматизации съема из делий с конвейера и укладки их в пакеты. Из основного авт, св. № 781066 из вестен автомат, содержащий тележку переноса и расположенную внутри нее тележку продольного перемещения с за хватом и подъемным механизмом, синхронизатор, выполненный в виде гибко го замкнутого элемента с закрепленными на нем упорами, причем тележка продольного перемещения снабжена зацепом, контактирующим с упорами синхронизатора, кинематически связанного с конвейером, установленные на ста нине р . Недостаток известного автомата заключается в том, что в случае отказа электрической части привода тележки переноса или конечных выключателей в момент, когда зацеп и упор синхронизатора находятся в зацеплении, возможна поломка элементов синхронизатора или зацепа. Целью изобретения является повышение надежности работы. Указанная цель достигается тем, что автомат снабжен установленным перед синхронизатором копиром, а зацеп тележки - роликом, установленным посредством оси с возможностью контактирования с роликом в процессе перемещения зацепа. На фиг. 1 изображен автомат, общий вид; на фиг. 2 - взаимное расположение захвата и изделий на конвейере; на фиг. 3 - узел I на фиг. 1 в увеличенном масштабе; на фиг. - механизм зацепления, вид сверху; на фиг. 5 положение ролика на копире, при котором зацеп выходит из зацепления с упором синхронизатора. Автомат содержит станину 1, на которой смонтирована тележка 2 переноса, внутри которой расположена тележка 3 продольного перемещения с захва396том k и механизмом 5 подъема его. На станине 1 смонтирован также синхронизатор, выполненный в виде замкнутого гибкого элемента 6 с закрепленными на нем упорами 7 и кинематически связанного с конвейером 8, например, цепной передачей 9 с приводным валом 10 конвейера. Тележка 3 продольного пере мещения имеет зацеп 11, периодически входящий в контакт с упорами 7 синхро низатора. Зацеп 11 снабжен роликом 12, посаженным на ось 13 и периодически обкатывающимся по копиру , закрепленному на станине 1, Автомат работает следующим образом При движении конвейера 8 с лежащими на нем изделиями приходит в движение и гибкий элемент 6 синхронизатора. Когда один из упоров 7 входит в контакт с зацепом 11, начинает пере.мещаться тележка 3 продольного перемещения с захватом k, находящимся в крайнем нижнем положении Над конвейером 8 (см. фиг. 2). Когда упор 7 с зацепом 11 выходит на прямолинейный участок (см. фиг. 3 положение зацепа и упора показано штрихпунктирной линией), скорость перемещения тележки 3 с захватом k становится равной скорости движения конвейера 8, ив этот момент подается импульс на срабатывание захвата . При перемещении упором 7 тележки 3 ролик 12 зацепа 11 накатывается на копир k и начинает выводить зацеп 11 из зацепления с упором 7 (см. фиг. 5) Профиль копира 1 должен.обеспечивать вывод зацепа 11 из зацепления на расстоянии, меньшем длины свободного хода тележки 3- В случае отказа электрической части привода тележки 2 пе реноса или конечных выключателей ролик 12 и копир Ш обеспечат вывод за4цепа 11 из зацепления с упором 7 при определенном положении тележки 3. В дальнейшем захват 4 с зажатыми изделиями перемещается механизмом 5 подъема вверх над конвейером 8 в крайнее положение, после чего начинает перемещаться тележка 2 в поперечном направлении. Уложив изделия в пакет, тележка 2 и захват k возвращаются в исходноё положение над конвейером 8. Исходное и конечное положения тележки 3 продольного перемещения обеспечиваются копиром (на чертеже не показан). Исходное положение тележки 3 и зацепа 11 по отношению к синхронизатору показано на фиг. 3. Далее цикл повторяется. Таким образом, предлагаемое усовершенствование известного автомата повышает надежность его работы, поскольку исключает возможность выхода из строя элементов синхронизатора или зацепа при отказе электрической части привода тележки переноса или конечных выключателей. Формула изобретения Автомат для съема изделий с конвейера и укладки их в пакеты по авт. св. № 781066, отличающийся тем, что, с целью повышения надежности его в работе, он снабжен установленным перед синхронизатором копиром, а зацеп тележки - роликом, /становленным посредством оси с возможностью контактирования с копиром в процессе перемещения зацепа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельствоСССР № 781066, кл. В 28 В 13/00, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для съема изделий с конвейера и укладки их в пакеты | 1978 |
|
SU781066A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1983 |
|
SU1097543A1 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Автомат для сборки наконечников гибких шлангов | 1984 |
|
SU1186454A1 |
| Комплектователь слоя садки кирпича на обжиговую вагонетку | 1983 |
|
SU1140965A1 |
| Тележечный конвейер | 1980 |
|
SU981136A1 |
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Способ формирования группы кирпичей и устройство для его осуществления | 1980 |
|
SU960021A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |

F3
3r
Jb/ /
