(5) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU825407A1 |
| Способ транспортирования изделий и шаговый конвейер для его осуществления | 1983 |
|
SU1167119A1 |
| Способ транспортирования изделий шаговым конвейером и устройство для его осуществления | 1985 |
|
SU1247327A1 |
| Устройство для укладки длинномерных изделий в пакет | 1989 |
|
SU1756248A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Шаговый конвейер | 1980 |
|
SU1079557A1 |
| АВТОМАТИЗИРОВАННОЕ МНОГОЯРУСНОЕ УСТРОЙСТВО | 1993 |
|
RU2043277C1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
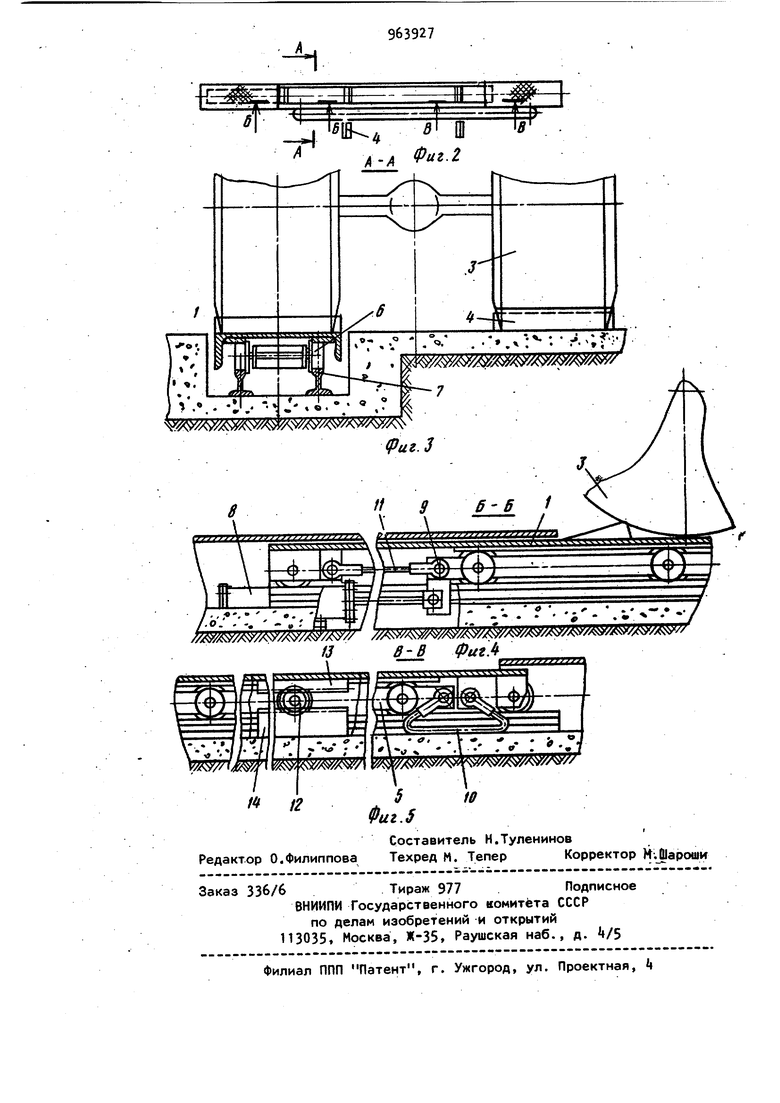
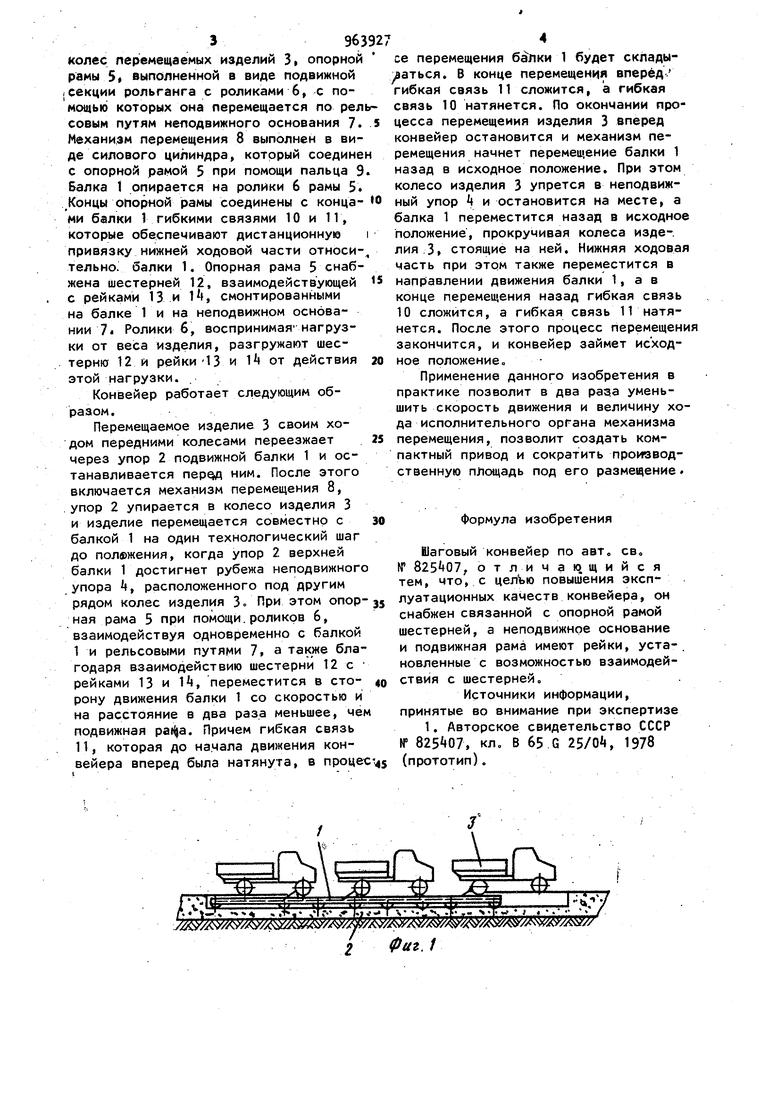
Изобретение относится к подъемно-транспортному машиностроению, а именно к шаговым конвейерам. Па основному авт.св.М 825 07извес тен шаговый конвейер, содержащий неподвижное основание, размещенную.на неподвижном основании опорную раму, установленную на опорной раме подвижную раму в виде балки с толкателя ми, связанную с приводом возвратнопоступательного перемещения, при это опорная рама выполнена в виде подвиж ной секции рольганга, концы которой соединены с концами балки посредством гибких связей 1 ° Недостатком этого конвейера является то, что он не удовлетворяет тре бованиям скорости перемещения издели и хода подвижной рамы. В этом техническом решении скорость и величина хода перемещения изделия находится в прямо пропорциональной зависимости. На сколько и с какой скоростью переместится шток, цилиндра, на столько же и с такой же скоростью переместит ся подвижная рама, а следовательно, и изделие. Это.снижает эксплуатационные качества конвейера. Целью изобретения является повышение эксплуатационных качеств конвейера. Постаэленная цель достигается тем, что конвейер снабжен связанной с опорной рамой шестерней, а неподвижное основание и подвижнаярама имеют рейки установленные с возможностью взаимодействия с шестерней. На фиг.1 показан конвейер, продольный разрез; на фиг.2 - то же, вид в плане; на фиг.З разрез А-А на фиг.2; на фиг. - разрез Б-6 на фиг.2; на фиг,5 - разрез 8-В на фиг.2. Шаговый конвейер состоит из подвижной балки 1 с упорами 2, расположенной под одним рядом колес перемещаемого изделия 3 неподвижных упоров Ц, расположенных под другим рядом 3963 колес перемещаемых изделий 3 опорной рамы 5 выполненной в виде подвижной {Секции рольганга с роликами б, с помощью которых она перемещается по рел совым путям неподвижного основания 7. Механи.эм перемещения 8 выполнен в виде силового цилиндра, который соедине с опорной рамой 5 при помощи пальца 9 Балка 1 опирается на ролики 6 рамы 5. Концы опорной рамы соединены с концами балки 1 гибкими связями 10 и 11, которые обеспечивают дистанционную привязку нижней ходовой части относительной балки 1. Опорная рама 5 снабжена шестерней 12, взаимодействующей с рейками 13 и 1, смонтированными на балке 1 и на неподвижном основании 7. Ролики б, воспринимая нагрузки от веса изделия, разгружают шестерню 12 и рейки13 и I от действия этой нагрузки. Конвейер работает следующим образом. Перемещаемое изделие 3 своим ходом передними колесами переезжает через упор 2 подвижной балки 1 и останавливается перед ним. После этого включается механизм перемещения 8, упор 2 упирается в колесо изделия 3 и изделие перемещается совместно с балкой 1 на один технологический шаг до положения, когда упор 2 верхней балки 1 достигнет рубежа неподвижного упора k, расположенного под другим рядом колес изделия 3. При этом опорная рама 5 при помощи.роликов 6, взаимодействуя одновременно с балкой 1 и рельсовыми путями 7, а также благодаря взаимодействию шестерни 12 с рейками 13 и Н, переместится в сторону движения балки 1 со скоростью и на расстояние в два раза меньшее, чем подвижная . Причем гибкая связь 11, которая до на.чала движения конвейера вперед была натянута, в процес се перемещения балки 1 будет складыаться. В конце перемещения вперёд. гибкая связь 11 сложится, а гибкая связь 10 натянется. По окончании процесса перемещения изделия 3 вперед конвейер остановится и механизм перемещения начнет перемещение балки 1 назад в исходное положение. При этом колесо изделия 3 упрется в неподвижный упор А и остановится на месте, а балка 1 переместится назад в исходное Положение, прокручивая колеса изде-. ЛИЯ 3, стоящие на ней. Нижняя ходовая часть при этом также переместится в направлении движения балки 1, а в конце перемещения назад гибкая связь 10 сложится, а гибкая связь 11 натянется. После этого процесс перемещения закончится, и конвейер займет исходное положение Применение данного изобретения в практике позволит в два раз.а уменьшить скорость движения и величину хода исполнительного органа механизма перемещения, позволит создать компактный привод и сократить пpo fЗвoдственную площадь под его размещение. Формула изобретения Шаговый конвейер по авт, св« tP f отличающийся тем, что, с повышения эксплуатационных качеств конвейера, он снабжен связанной с опорной рамой шестерней, а неподвижное основание и подвижная рама имеют рейки, установленные с возможностью взаимодействия с шестерней.. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР If 825А07, кл. В 65 G 25/0, 1978 (прототип).
