Изобретение относится к подъемно-транспортной технике, а именно к способам и устройствам транспортирования изделия шаговым конвейером.
Цель изобретения - повышение производительности за счет увеличения скорости транспортирования изделий.
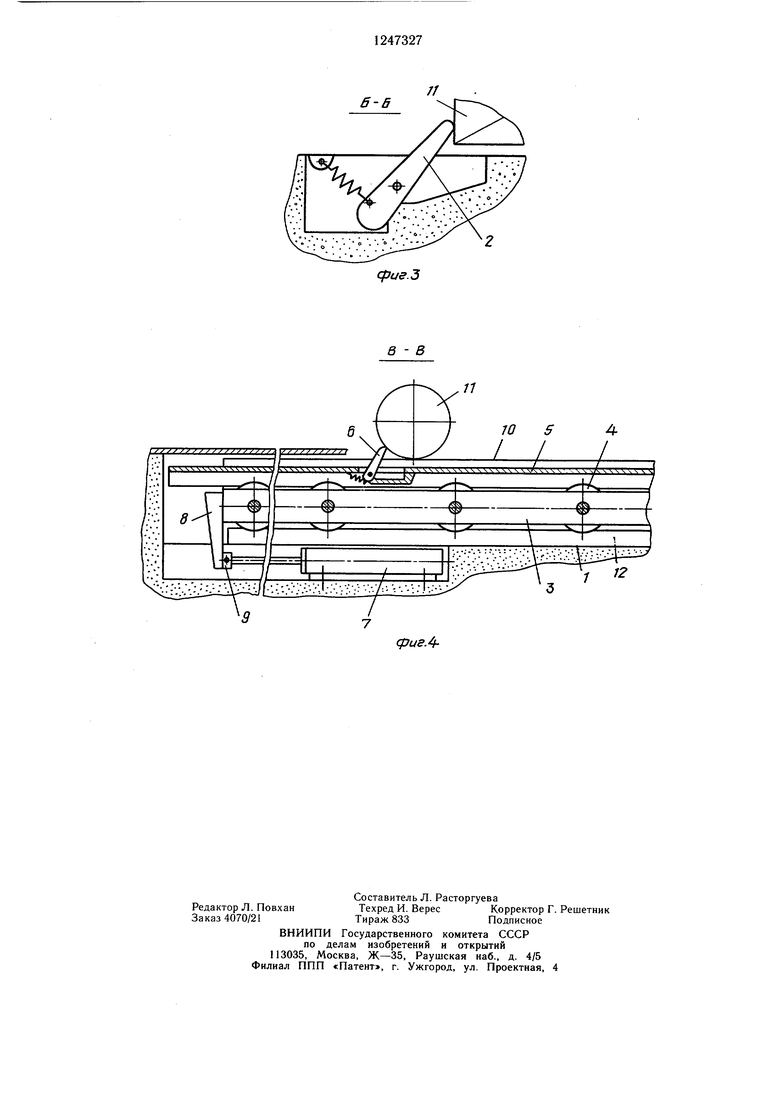
На фиг. 1 показан общий вид конвейера, осуществляющего данный способ транспортирования изделия, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Способ транспортирования изделия щаго- вым конвейером осуществляют следующим образом.
После включения привода 7 перемещения начинается движение опорной рамы 3, выполняющей роль грузонесущего полотна, вместе (совместно) с изделием 11 вперед по ходу транспортирования (на фиг. 1 и 4 -
5 вправо). Одновременно с этим опорная рама 3 при помощи роликов 4 взаимодействуя одновременно с подвижной рамой 5 перемещает ее в ту же сторону, а вместе с ней и изделие 11 при помощи толкателей 6 (т. е.
10 начинается перемещение изделия способом грузоведущего конвейера по движущемуся вперед грузонесущему полотну).
Перемещение изделия 11 относительно неподвижного основания 1 в два раза больше
хода рабочего органа привода 7 и совершаетИзделие устанавливают на подвижное по- 5 ся со скоростью, в два раза большей, чем
лотно и затем перемещают на подвижномскорость рабочего органа привода 7.
полотне при прямом ходе и поступательномВ том случае, если на грузонесущие надвижении последнего по ходу транспортиро-правляющие установить в качестве изделия
вания, а при обратном ходе подвижного11 сортовой прокат в виде круга или авЕюлотна изделие фиксируют против хода томобиль (фиг. 4), то подвижная рама 5,
транспортировании. При этом при прямом ходе подвижного полотна изделие перемещают относительно него по ходу транспортирования.
Конвейер, осуществляющий данный споперемещая такое изделие вперед, осуществляет вращение его, например, по часовой стрелке с угловой скоростью, в два раза меньшей, чем соответствующая ей линейная скорость перемещения изделия относительно несоб, содержит неподвижное основание 1, за- 25 подвижного основания 1. крепленные на нем упоры 2, опорную рамуПосле окончания цикла перемещения изв виде подвижной секции рольганга 3 с ро-делия 11 вперед по ходу транспортироваликами 4, установленную на опорной рамения оно останавливается перед упорами 2,
после чего механизм перемещения останавливает силовой цилиндр 7, и последний на- 30 чинает свое движение в обратном направлении, вследствии чего опорная 3 и подвижная 5 рамы начинают свое движение против хода транспортирования. Изделие 11 при этом упирается в упоры 2 и остается на месте, а опорная 3 и подвижная 5 рамы
несущих направляющих 10 выще поверх- возвращаются в исходное положение, и т. д. ности неподвижного основания 1 и поверхности подвижной рамы 5. Изделие 11 пере-В целях исключения проскальзывания
подвижной рамы 5 относительно опорной 3 при транспортировании особо тяжелых гру- д0 зов, например автомобилей, опорная рама 3 снабжается шестерней, взаимодействующей с рейками (не показаны), смонтированными на неподвижном основании 1 и подвижной раме 5.
подвижную раму 5 с толкателями 6.
Привод 7 возвратно-поступательного перемещения выполнен в виде силового цилиндра, который соединен с опорной рамой 3 при помощи кронштейна 8 и пальца 9. Опорная рама 3 снабжена установленными на ней грузонесущими направляющими 10 для изделий. Причем поверхность грузомещается по грузонесущим направляющим 10. Ролики 4 рольганга 3 перемещаются по направляющим 12.
Конвейер работает следующим образом.
Изделие 11 (ящик, контейнер и т. д.) устанавливают на неподвижное основание 1 перед упорами 2 и толкателем 6.
После включения привода 7 перемещения начинается движение опорной рамы 3, выполняющей роль грузонесущего полотна, вместе (совместно) с изделием 11 вперед по ходу транспортирования (на фиг. 1 и 4 -
вправо). Одновременно с этим опорная рама 3 при помощи роликов 4 взаимодействуя одновременно с подвижной рамой 5 перемещает ее в ту же сторону, а вместе с ней и изделие 11 при помощи толкателей 6 (т. е.
начинается перемещение изделия способом грузоведущего конвейера по движущемуся вперед грузонесущему полотну).
Перемещение изделия 11 относительно неподвижного основания 1 в два раза больше
томобиль (фиг. 4), то подвижная рама 5,
перемещая такое изделие вперед, осуществляет вращение его, например, по часовой стрелке с угловой скоростью, в два раза меньшей, чем соответствующая ей линейная скорость перемещения изделия относительно не подвижного основания 1. После окончания цикла перемещения изА -А
фиг-2
V V2
б-Б
cfas.S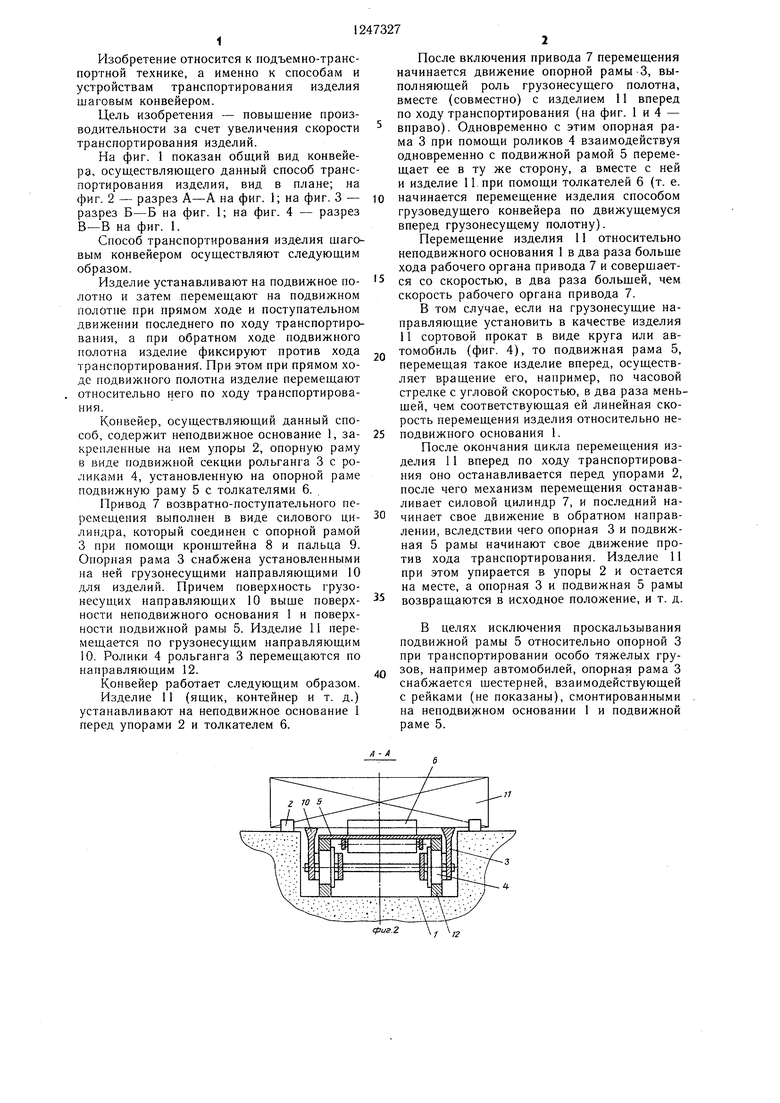
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ транспортирования изделий и шаговый конвейер для его осуществления | 1983 |
|
SU1167119A1 |
| Шаговый конвейер | 1979 |
|
SU825407A1 |
| Шаговый конвейер | 1980 |
|
SU963927A2 |
| Шаговый конвейер | 1980 |
|
SU1079557A1 |
| Шаговый конвейер | 1977 |
|
SU662445A1 |
| Способ транспортирования изделий с колесным шасси на шаговом конвейере | 1975 |
|
SU605761A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Шаговый конвейер | 1984 |
|
SU1222599A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
1. Способ транспортирования изделий шаговым конвейером, включающий установку изделий на подвижное полотно, перемещение изделий на подвижном полотне при прямом ходе и поступательном движении последнего и фиксацию изделия при обратном ходе подвижного полотна, отличающийся тем, что, с целью повышения производительности за счет увеличения скорости транспортирования изделий, при прямом ходе подвижного полотна изделие перемещают относительно него по ходу транспортирования. 2. Шаговый конвейер для транспортирования изделий, содержащий неподвижное основание, закрепленные на неподвижном основании упоры, опорную раму в виде подвижной секции рольганга, установленную на опорной раме подвижную раму с толкателями и привод возвратно-поступательного перемещения, связанный с опорной рамой, отличающийся тем, что опорная рама снабжена установленными на ней грузонесущими направляющими для изделий, расположенными с наружных боковых сторон опорной рамы, причем поверхность грузонесущих направляющих выше поверхности неподвижного основания и поверхности подвижной рамы. (Л Nd Од 1C 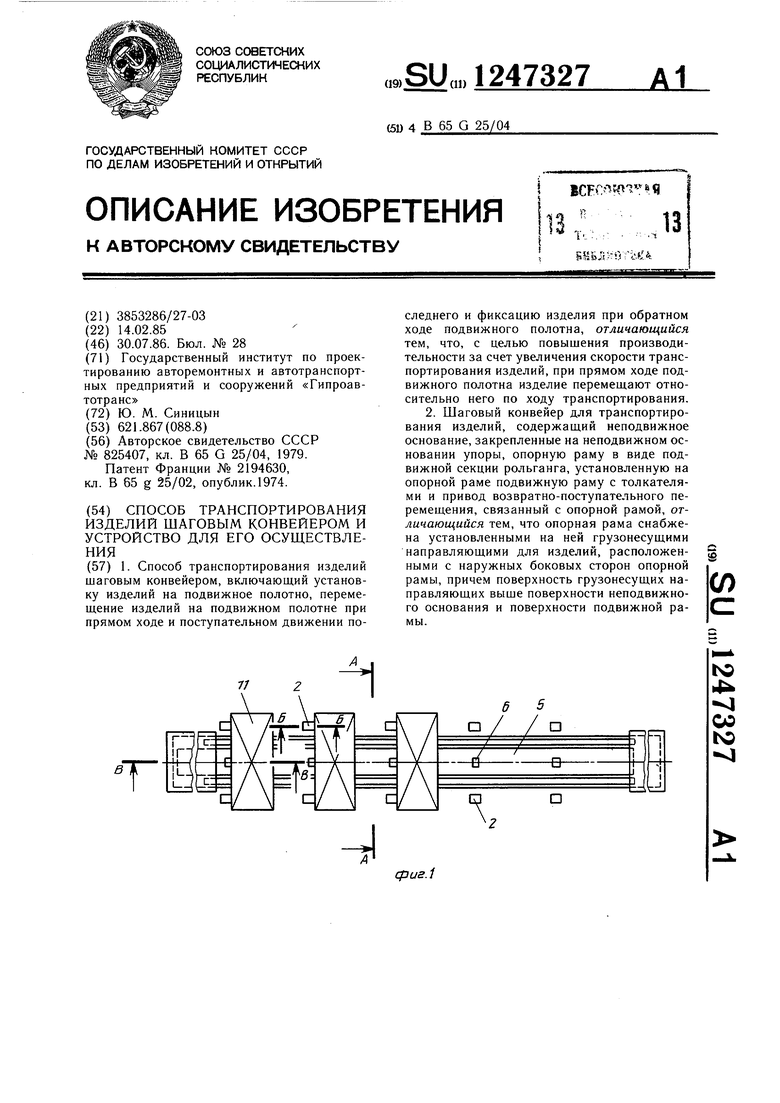
П
12
сриг.4
| Шаговый конвейер | 1979 |
|
SU825407A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194630C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
