(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU963927A2 |
| Способ транспортирования изделий и шаговый конвейер для его осуществления | 1983 |
|
SU1167119A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Устройство для укладки длинномерных изделий в пакет | 1989 |
|
SU1756248A1 |
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1971 |
|
SU430014A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Кассетная линия для изготовления строительных изделий | 1990 |
|
SU1785906A1 |
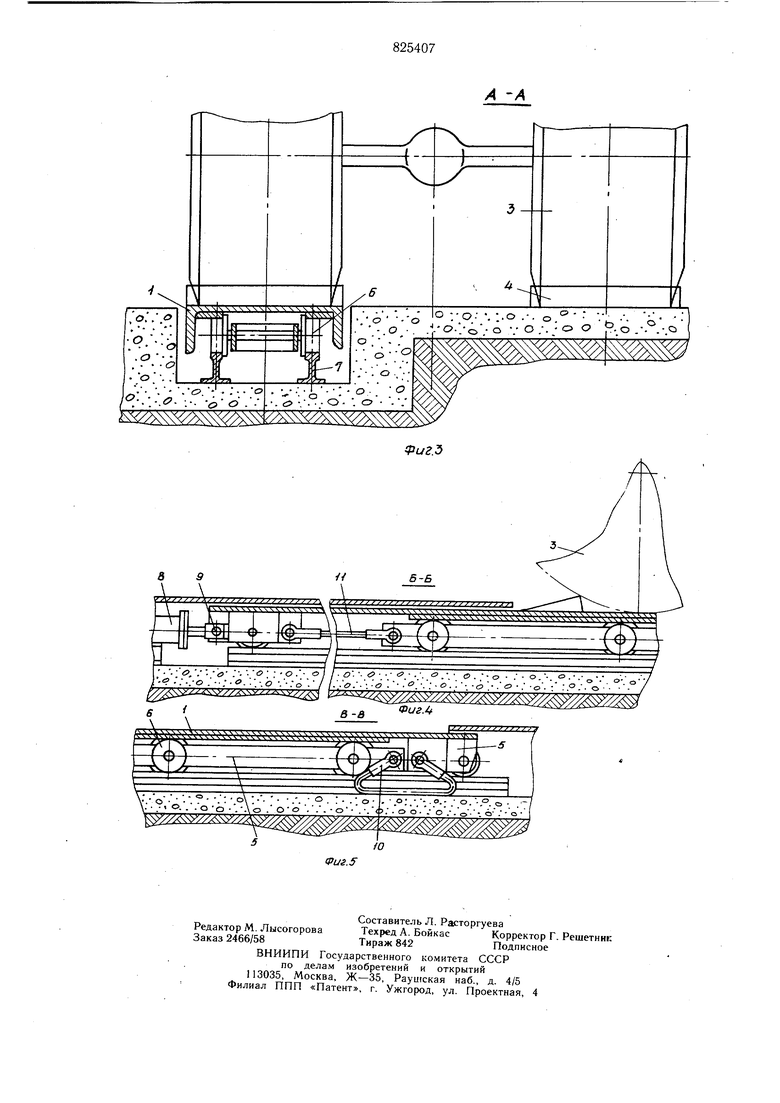
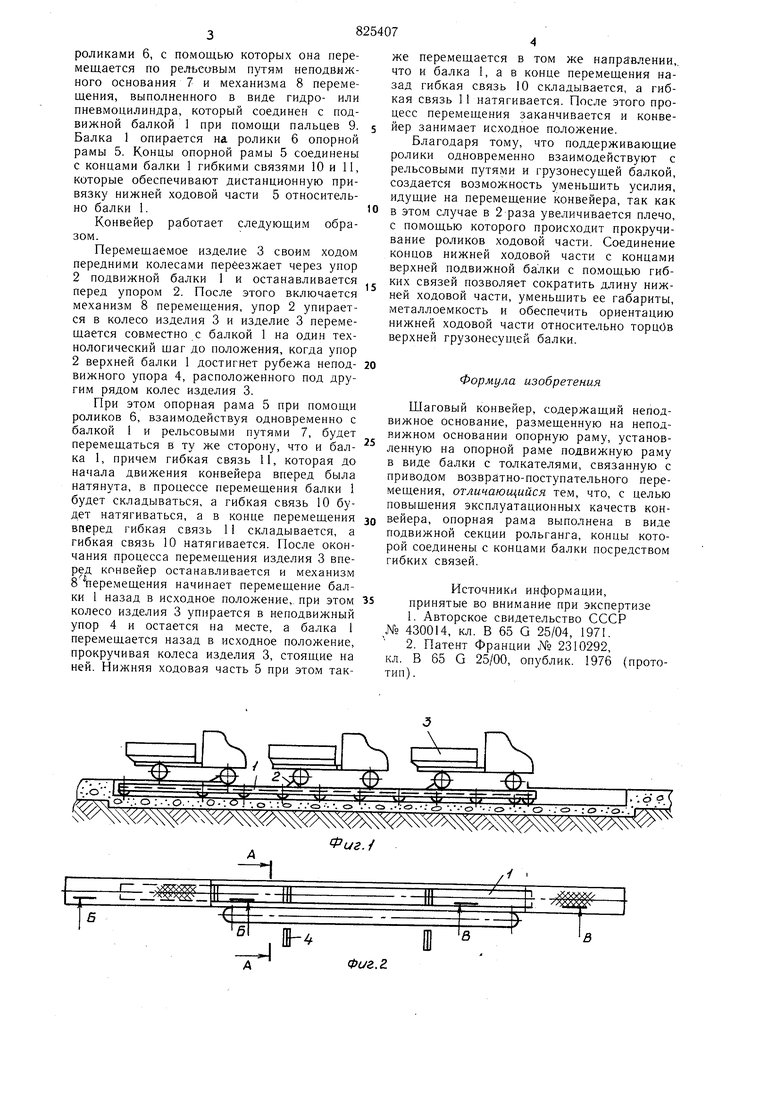
Изобретение относится к подъемно-транспортной технике, а именно к шаговым конвейерам. известен шаговый конвейер, состоящий из нижней ходовой части, опирающейся своими катками на рельсовый путь, установленный на фундаменте, и верхней опорной части в виде балки. Нижняя ходовая снабжена кроме ходовых катков еще и .поддерживающими катками 1. Наличие поддерживающих катков значительно усложняет конструкцию ходовой части, увеличивает габариты конвейера по высоте и ув личивает металлоемкость конвейера. Наиболее близким техническим решением из известных является шаговый конвейер, содержащий подвижное основание, размещенную на неподвижном основании опорную раму, установленную на опорной раме подвижную раму в виде балки с толкателями, связанную с приводом возвратно-поступательного перемещения. Опорная рама выполнена в виде двух рядов роликов, закрепленных на неподвижном основании посредством кронштейнов на горизонтальных осях. При перемещении балки ролики, вращаясь, остаются на месте 2. Конструкция данной опорной рамы достаточно металлоемка. Кроме того, она не позволяет уменьшить усилия, идущие на перемещение конвейера. Указанные недостатки снижают эксплуатационные качества конвейера. Цель изобретения - повыщение эксплуатационных качеств конвейера. Указанная цель достигается тем, что в предлагаемом конвейере опорная рама выполнена в виде подвижной секции рольганга, концы которой соединены с концами балки посредством гибких связей. На фиг. 1 изображен конвейер, продольный разрез; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2. Шаговый конвейер состоит из подвижной балки 1 с упорами 2, расположенной под одним рядом колес перемещаемого изделия 3, неподвижных упоров 4, расположенных под другим рядом колес перемещаемых изделий 3, опорной рамы 5, выполненной в виде подвижной секции рольганга с роликами 6, с помощью которых она перемещается по рельео-вым путям неподвмжного основания 7 и механизма 8 перемещения, выполненного в виде гидро- или пневмоцилиндра, который соединен с подвижной балкой 1 при помощи пальцев 9. Балка 1 опирается на ролики 6 опорной рамы 5. Концы опорной рамы 5 соединены с концами балки 1 гибкими связями 10 и 11, которые обеспечивают дистанционную привязку нижней ходовой части 5 относительно балки 1. Конвейер работает следующим образом. Перемещаемое изделие 3 своим ходом передними колесами переезжает через упор 2 подвижной балки 1 и останавливается перед упором 2. После этого включается механизм 8 перемещения, упор 2 упирается в колесо изделия 3 и изделие 3 перемещается совместно с балкой 1 на один технологический щаг до положения, когда упор 2 верхней балки 1 достигнет рубежа неподвижного упора 4, расположенного под другим рядом колес изделия 3. При этом опорная рама 5 при помощи роликов 6, взаимодействуя одновременно с балкой 1 и рельсовыми путями 7, будет перемещаться в ту же сторону, что и балка 1, причем гибкая связь 11, которая до начала движения конвейера вперед была натянута, в процессе перемещения балки 1 будет складываться, а гибкая связь 10 будет натягиваться, а в конце перемещения вперед гибкая связь 11 складывается, а гибкая связь 10 натягивается. После окончания процесса перемещения изделия 3 вперед конвейер останавливается и механизм 8%еремещения начинает перемещение балки 1 назад в исходное положение,, при этом колесо изделия 3 упирается в неподвижный упор 4 и остается на месте, а балка 1 перемещается назад в исходное положение, прокручивая колеса изделия 3, стоящие на ней. Нижняя ходовая часть 5 при этом такчг-де--II I f ,
А I 2
fe-Jt): - - -:ргГ.1h .о
УтТчГП О .. О : . о.-. .О-.О .1 . о . -.to .. . с. .;. са .;о. -о: о .-. О : о - : О .о.. Гт;::
с/г. /
Ы же перемещается в том же направлении,. что и балка 1, а в конце перемещения назад гибкая связь 10 складывается, а гибкая связь 11 натягивается. После этого процесс перемещения заканчивается и конвейер занимает исходное положение. Благодаря тому, что поддерживающие ролики одновременно взаимодействуют с рельсовыми путями и грузонесущей балкой, создается возможность уменьщить усилия, идущие на перемещение конвейера, так как в этом случае в 2 раза увеличивается плечо, с помощью которого происходит прокручивание роликов ходовой части. Соединение концов нижней ходовой части с концами верхней подвижной балки с помощью гибких связей позволяет сократить длину нижней ходовой части, уменьщить ее габариты, металлоемкость и обеспечить ориентацию нижней ходовой части относительно торцбв верхней грузонесуп.ей балки. Формула изобретения Шаговый конвейер, содержащий неподвижное основание, размещенную на неподвижном основании опорную раму, установленную на опорной раме подвижную раму в виде балки с толкателями, связанную с приводом возвра1тно-поступательного перемещения, отличающийся тем, что, с целью повыщения эксплуатационных качеств конвейера, опорная рама выполнена в виде подвижной секции рольганга, концы которой соединены с концами балки посредством гибких связей. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 430014, кл. В 65 G 25/04, 1971. 2. Патент Франции № 2310292, кл. В 65 G 25/00, опублик. 1976 (прототип).
