1
Изобретение относится к cHCreMaicf авгоматического регулирования, в частности к следящим приводам, и может быть использовано в автомагизированных системах управления технологическими процессами - в динамических испьттатёпьнь1х стендах.
Известны двудвигательные следящие приводы, содержащие устройства управления, датчики обратной связи и два канала, причем выходные валы исполнительных двигателей соединены через дифференциал, а оба канала имеют обший вход Г1 Эти приводы имеют ограничение диапазоьна регулирования скорости слежения зо.-, ной устойчивой работы исполнительных двигателей и увеличением погрешностей датчиков обратной связи при малых скоростях слежения. Известны также двуцвигательные следящие приводы, в которых один из каналов выполняет роль опорного, а управление осушествляется но Другому каналу 2. В этом приводе имеет место увеличение статической ошибки при
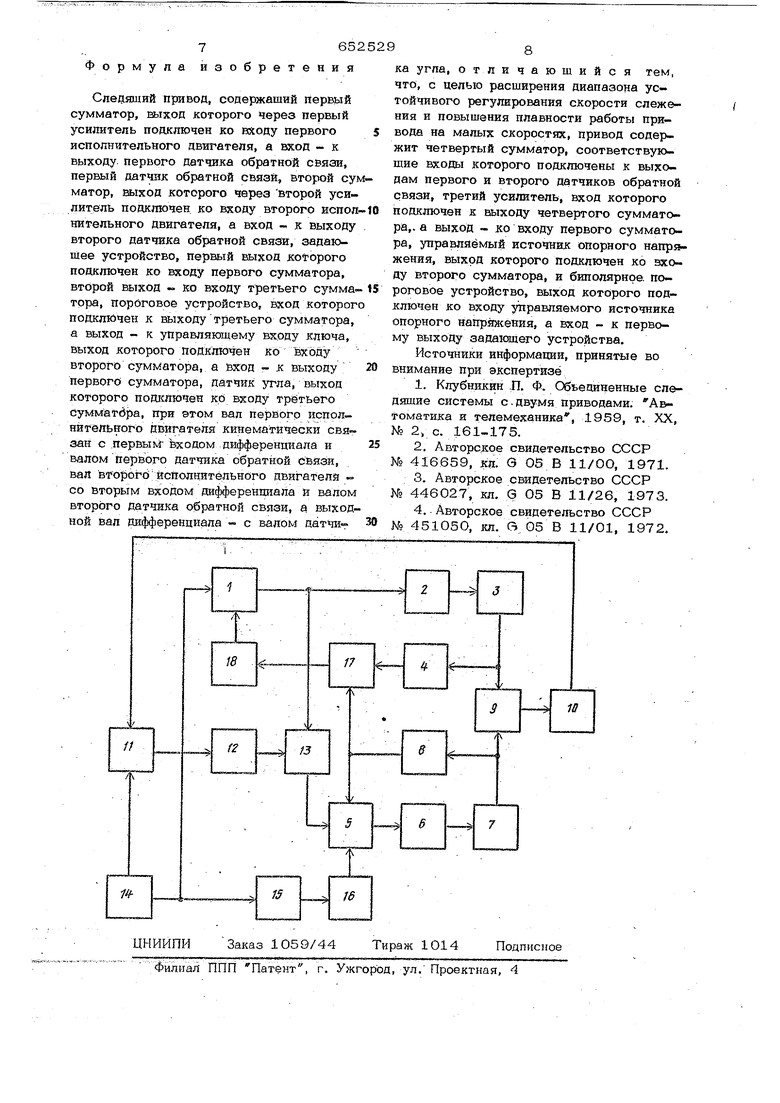
больших скоростях слежения иэ-за отсу1 ствия в этом режиме обратной связи по скорости вращения вьтходнбго вада привода. Известны также двудвигательные следящие приводы, в которых один из каналов является основнь1м, а другой корректирующим 3, Они характеризуются ограничением диадазона регулирования скорости спежёння зоной устойчивой работы исполни епьнь1Х двигателей и снижением статической точности при малых скоростях слежения за счет увепичения погрещностейдатчиков обратной связи. Из известных слейящих пртводов наиболее близким к изобретению по технической сущности является спедшций привод, содержащий первый сумматор, выход которого через першзтй усилвтеяь подключен ко ВХОДУ первого нспопнитепьного двигателя, а вход - к выходу первого датчика обратной с&язк, первый датчик обратной связи, второй сумматор, выход которого, через второй усилитель подключен кр входу второго исполнительного двигателя, а вход - к выходу второго да чика обратной связи, задающее устройство, первый выход которого подключен ко входу первого сумматора, второй выход ко входу третьего :CyMMatopd; ir6p6fi№be устройство, вкоа которого подключен к выходу Tpetbero сумматора, а выход - к управляющему входу ключа, выход которо го подключев ко входу второго сумматора, а вход - к выходу первого сумматора датчик угла, выход ксигорого подключен ко входу третьего сумматора, прт этом вал первого исподвитевьного двигателя кияематическа связан с первым входом дифференциала и валом первого датчика обратной связи, вал второго испойннтель ного двигатейя - со вторым входом дифференциала и валом второго датчика обратной связи, а выходной вал дифференциала -с валом датчикаугпа 4.Однако он характеризуется огравичением нижнего предела диапазона регуаярования скорости слехсеШя зоной устойчивой работы йсполрстельаьпс двигателей, что не позволяет получать нйашой отработки угла piaccDrjiacopasrafl ври малых (ползучих) cKojpQCTsK слежения; у1вбличенйем Ьтатеческой ошибки при снвжеййЕг скорое ти cлёkeнй:я убеличения погрешнос тей датчиков обратной связи прт малых скорсетях ЁЕр йенйй их вхойаых валов; ограайчением дшга мическс точности, наличием моментов трогания и яюфтами в KnHiBMatri eefcBEx цёнй. Целью азобретення явйяетсза расширение диапазона устойчивого регулирования скорости слеженйя и йОйышейиё плавности работы на майых скоростях. В предлагаемом приводе это достигается тем, что он содержит четвертый сумматор, соответствуклдие вхощл которого подключены к ы 1ходам первого и второго датчиков обратной связи, третий усилитель, вход которого Подклйчен к ййходу четвертого сумматора, а выход - ко входу первого сумматора, управляемый источник опорного напряжения, выход которого подключен ко входу второго сумматора, и биполярное пороговое устройство, выход, которого подключен ко входу управляемого источника опорного иайряжения, а вход - к первому выходу задающего устройстба., На чертеже представлена бло1б-схема предлагаемого следящего привода. Он содержит сумматор 1, к выходу хоторого через усилитель 2 подключен исполнительный двигатель 3, №1ход ко652529торого кинематически связан с валом (на чертеже не показан) датчика обратной связи 4, сумматор 5, к выходу которого через усилитель 6 подключен исполнительнь1й двигатель 7, выход которого кинематически связан с валом датчика обратной связи 8, дифференциал 9, входы которого кинематически связаны с валами исполнительных двигателей 3 и 7, а выход - с валом датчика угла 10, сумматор 11, один из входов которого подключен к датчику угла 10, а выход - к пороговому устройству. 12, ключ 13, вход которого подключен к выходу сумматора 1, выход - ко входу сумматора 5, а управляющий вход - к выходу порогового устройства 12, задающее устройство 14, один из выходов которого подключен ко входу сумматора 11, а другой выход-, ко входу сумматора 1 и ко входу биполярного порогового устройства 15, управляемый источник опорного напр эжетния 16, выход которого подключен ко входу сумматора 5, а вход - к выходу биполярного порогового устройства 15, сумматор 17, ко входам которого посн ключень выходы датчиков обратной связи 4 и 8, а выход через усилитель 18 подключен кр входу сумматора 1. От задающего устройства 14 на вход сумматора 11 поступает напряжение U(t), пропоршюнальное заданному углу поворота выходного вала (на чертеже не показан) привода, а напряжение Uw{t), пропорциональное заданной скорости слезкенйя, поступает на вход сумматора 1 и на вход биполярного порогового устройства 15, На вход сумматора 5 подается напряжение UOR от управляемого источника опорного йапряжения 16. Когда U(t) , скорость CAig выходного вала исполнительно двигателя 7 пропорциональна величине Uon при этом выходное напряжение Uoca Датчика обратной связи 8, пропорциональное С а .через сумматор 17 и усилитель 18, коэффициент передачи которого устанавливается в соответствии с коэффициентами передачи кинематических цепей привода, подается на вход сумматора 1. Таким образом, есливыполня ется соотношение Кррс Коса Kpocj., где KOC и Коса -коэффициенты передачи датчиков, обратной связи 4 и 8 соогвегственно;Крос4 и К роса -коэффициенты передачи кинематических цепей от вала датчика обратной связи 4 к Первому входу дифференциала 9 и от вала датчика обратной свя56зи 8-ко второму входу дифференциала со ответственно, то при нулевых значениях напряжения на выходах задающего устрой ства 14 скорость вращения выходного. вала дифференциала 9 to 0, а скорости вращения выходных валов исполнительных двигателей. 3 и 7 связаны соотношением 4 Рг 1 где и - скорости вращения выход ных валов исполнительных двигателей 3 и 7 соответственно; KpjH Кр - коэффициенты передачи кинематических цепей от исполнительного двигателя 3 к первому входу дифференциала и от исполнительного двигателя 7- ко второму входу дифференциала соответственно. Когда выходные напряжения задаюшего устройства 14 принимают значения /U4.( и 0 /U«tt),, где Uacp - порог срабатывания биполярного порогового устройства 15, а велич на напряжения/UUv(i на выходе суммато ра 11, пропорциональная углу рассогласо вания, меньше заданного значения порога срабатывания Ujcp порогового устройства 12, отработка угла рассогласования осуществляется по основному каналу привода (сумматор 1, усилитель 2, испопнител вый двигатель з), а другой канал (сумматор 5, усилитель 6, исполнительный дви гатель 7) выполняет функции опорного. При этом скорости л)ц и имеют различный знак. Когда величина угла рассог ласования превышает заданное значение, т.е. выполняет условие /д,;.,),cp;. с выхода сумматора 1 через ключ 13 на вход сумматора 5 поступает напряжение AUiu(tj , пропорциональное ошибке по скорости, и тогда скорость шд пропорциональна сумме о. + AUco(t), при этом сохраняется встречное направ ление вращения выходных валов исподнительных двигателей 3 и 7. Когда Bieim чтта/А(1у()/ становится меньше порога отпускания порогового устройства 12, ключ 13 закрывается, и канал привода, содержащий сумматор 5, усилитель 6 и исполнительный двигатель 7, снова выполняет функции опорного. .Когда величин напряжения Uwltj превышает заданное значение, т.е. выполняется условие /Uu,(, биполярное пороговое устройство 15 срабатыЕшет и переключает управляемьгй источник опорного напряжения 16 так. 9 1тобы полярность опорного напряжения на входе сумматора 5 соответствовала полярности напряжения Uw(i) . При этом скорости u5 и ojg выходных валов исполнительных двигателей 3 и 7 имеют одинакошз1й знак, и привод может работать с максимальнойскоростью слежения, определяемой соотношением . Цамакс Wg««Kc 7TF иk p 3 где uJj,j максимальная скорость вращения выходного вала дифференциала 9; максимальные скорости вращения валов исполнительных двигателей 3 и 7 соответственно;. К - коэффициент передачи дифференциала 9. Таким образом, предлагаемый следящий привод позволяет получать более широкий диапазон устойчивого регулирования скорости слежения - от малых (ползучих) до максимальных, определяемь1Х характеристиками элементов привода. При этом достигается плавность отработки приводом углов рассогласования на ползучих скоростях слежения за счет работы исполш1тельных двигателей в зоне устойчивости их характеристик, а также повышается статическая точность привода, так как во всех режимах работы привода датчики обратной связи работают при больших скоростях вращения своих валов, что снижает величину относительных погрешностей этих датчиков. Повышение динамической точности привода достигается в результате уменьшения величины зоны нечувствительности засчет того, что при постоянной работе двигателей люфты кинематических депей остаются выбранными во всех режимах работы привода и отсутствует необходимость в преодолении моментов трогания. Это позволяет улучшить частотные свойства привода. Кроме того, расширяет ся диапазон регулирования скорости слежения при высокой статической и ди- : намиЧеской точности во всем диапазоне рабочих скоростей следящего привода. Его применение поз1Йоляет создавать на базе серийно выпускаемых элементов высокоточные следящие системы с широким диапазоном регулирования скорости- нагрузки, расширить область применения электромеханических приводов и дает возможность в ряде случаев использовать их вместо электрогидравлических, что снижает стоимость изготовления и эксплуатации следящих систем в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Двухдвигательный следящий привод | 1972 |
|
SU451050A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Следящий привод | 1986 |
|
SU1339489A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Следящий привод | 1985 |
|
SU1270745A1 |
